1.本实用新型涉及晶粒挑拣设备。
背景技术:
2.随着发光二极管的发展,晶圆切割成多个晶粒(die or chip,又称为芯片)后,须依其质量、性能、产品特性予以分级分类,以将等级互异的晶粒应用于不同的领域,特别是在发光二极管(light emitted diode,led)的产业中,二极管的发光亮度、波长、色温、操作电压等会因制程条件的些许差异,即使在同一片led生产晶圆上,各个晶粒之间多少都会存在着些许微小差异。而随着发光二极管的分类要求渐趋于精细,目前已经发展出150类的分类细目,为求效率,一般会使用机械手臂进行分类。
3.因此,晶粒的挑拣分类速度便直接影响到生产速度,已知技术的晶粒的挑拣设备,利用单一挑拣臂结构在取晶平台上进行晶粒的分类撷取,并透过90
°
或180
°
旋转而转放于置晶平台上,为了准确的进行晶粒的拿取和置放,必须透过一摄像结构进行挑拣臂上的吸嘴的定位,从而可以使对位后的吸嘴位置为中心点,进行取晶平台以及置晶平台的位移参考,让该挑拣臂进行精准的晶粒取放,为配合挑拣装置在取晶平台与置晶平台之间达到较佳的取放效果,取晶平台与置晶平台可以顺逆向旋转并搭配水平方向轴向位移的方式来移动,使位于晶粒承载部的欲挑拣晶粒位移至挑拣定位点,致使该吸嘴仅须透过挑拣臂的旋转,便可移动至该挑拣定位点上方,此时,晶粒剥离部针顶欲挑拣的晶粒使其脱离晶粒承载部,致使吸嘴吸取该欲挑拣的晶粒。同理,该晶粒存放部亦可借由水平位移或旋转,致使该欲挑拣晶粒移至晶粒存放部上的对应位置而存放。因led晶圆尺寸由2吋、4吋、6吋逐步增大至8吋,取晶平台及置晶平台也须随着增大,且二者为水平放置,故挑拣臂也需随之加长,如此便会造成挑拣臂惯量增加使得控制难度增高,使得速度降低、精度变差。
4.以上为市场上现有挑拣设备技术,现有技术速度快、动作少,但缺少角度补偿机构,致使固晶时大角度偏差难以解决。另外现有晶粒的挑拣装置固晶时力度无法调节,无法控制晶粒所受压力大小。
技术实现要素:
5.本实用新型的特征和优点在下文的描述中部分地陈述,或者可从该描述显而易见,或者可通过实践本实用新型而学习。
6.本实用新型的目的是提供晶粒挑拣设备,能够调节顶晶头顶出的距离和速度,从而精确控制晶粒所受压力大小。
7.本实用新型解决上述技术问题所采用的技术方案如下:晶粒挑拣设备,包括顶晶组件,所述顶晶组件包括第二安装板、第四电机、凸轮、推杆、固晶头、滑轨和第三滑块,所述第四电机安装在所述第二安装板上,所述凸轮安装在所述第四电机的旋转轴上,所述推杆的一端设有轴承,所述轴承与所述凸轮接触,所述固晶头安装在所述推杆的另一端,所述滑轨安装在所述第二安装板上,所述第三滑块安装在所述推杆上,所述滑轨与所述第三滑块
配合。
8.所述顶晶组件还包括弹性复位件,所述弹性复位件的一端连接所述第二安装板,所述弹性复位件的另一端连接推杆。
9.所述晶粒挑拣设备还包括置晶平台、第一安装板、第一电机、第一转动轮、第二转动轮和连接带,所述第一电机安装于所述第一安装板上,所述第一转动轮安装于所述第一电机的旋转轴上,所述第二转动轮安装于所述第一安装板上,所述连接带连接所述第一转动轮和所述第二转动轮,所述置晶平台安装于所述第二转动轮上。
10.所述第一转动轮为第一同步轮,所述第二转动轮为第二同步轮,所述连接带为同步带。
11.所述晶粒挑拣设备还包括角度偏差检测装置,用于检测晶粒角度偏差。
12.所述角度偏差检测装置为摄像机。
13.所述晶粒挑拣设备还包括x轴运动组件和y轴运动组件,通过所述y轴运动组件带动所述置晶平台沿y轴运动,通过所述x轴运动组件带动所述置晶平台沿x轴运动。
14.所述y轴运动组件包括第二电机、第一连接座、第一丝杆、第一连接块、第一滑块和第一导轨,所述第二电机安装在所述第一连接座上,所述第一丝杆的一端与所述第二电机的旋转轴连接,所述第一丝杆另一端安装在所述第一连接座上,所述第一导轨安装在所述第一连接座上,所述第一滑块安装在所述第一导轨上,所述第一连接块与所述第一丝杆螺纹配合,所述第一滑块与所述第一连接块固定连接,所述第一安装板设置在所述第一滑块上。
15.所述x轴运动组件包括第三电机、第二连接座、第二丝杆、第二连接块、第二滑块和第二导轨,所述第二丝杆的一端与所述第三电机的旋转轴连接,所述第二滑块安装在所述第二导轨上,所述第二连接块与所述第二丝杆螺纹配合,所述第二滑块与所述第二连接块固定连接,所述第二连接座安装在所述第二滑块上,所述第一连接座安装在所述第二连接座上。
16.本实用新型第四电机驱动带动凸轮转动,由于凸轮与轴承接触,凸轮转动带动轴承转动,同时会推动轴承使得推杆在滑轨和第三滑块配合下向前移动,进而推动固晶头向前移动,由于第四电机的旋转角度精确可调,因此可精确调节顶晶头顶出的距离和速度,从而精确控制晶粒所受压力大小,减少吸嘴的磨损,减少换吸嘴的频率。
附图说明
17.下面通过参考附图并结合实例具体地描述本实用新型,本实用新型的优点和实现方式将会更加明显,其中附图所示内容仅用于对本实用新型的解释说明,而不构成对本实用新型的任何意义上的限制,在附图中:
18.图1为本实用新型实施例中t轴旋转结构的结构图;
19.图2为本实用新型实施例中t轴旋转结构的爆炸图;
20.图3为本实用新型实施例中t轴旋转结构旋转45度的状态图;
21.图4为本实用新型实施例中t轴旋转结构安装在x轴运动组件和y轴运动组件的结构图;
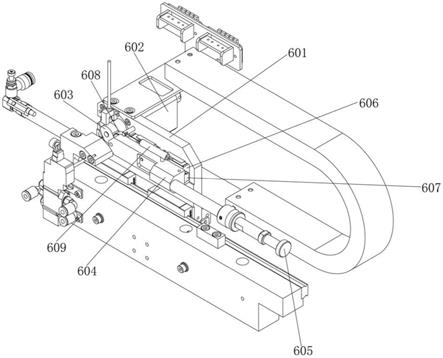
22.图5为本实用新型实施例中顶晶组件的结构图;
23.图6为本实用新型实施例中顶晶组件的侧面图;
24.图7为本实用新型实施例中顶晶组件的顶面图;
25.图8为本实用新型实施例中顶晶组件的爆炸图。
具体实施方式
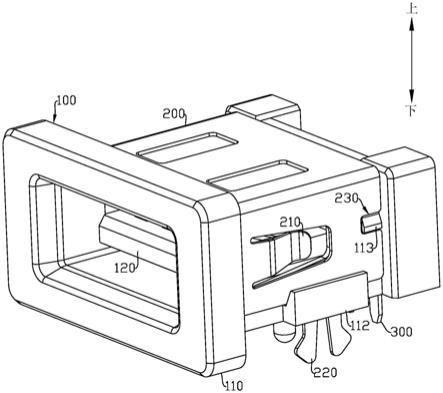
26.如图1和图3所示,本实用新型实施例中的晶粒挑拣设备,该晶粒挑拣设备包括t轴旋转结构100和置晶平台200,该t轴旋转结构100包括第一安装板101、第一电机102、第一转动轮103、第二转动轮104和连接带105,第一电机102安装于第一安装板101上,第一转动轮103安装于第一电机102的旋转轴上,第二转动轮104安装于第一安装板101上,连接带105连接第一转动轮103和第二转动轮104,置晶平台200安装于第二转动轮104上。
27.本实施例中,第一转动轮103为第一同步轮,第二转动轮104为第二同步轮,连接带105为同步带。这样第一电机102驱动带动第一同步轮转动,进而带动第二同步轮转动,第二同步轮转动带动安装在其上的置晶平台转动,在检测到晶粒角度偏差时,根据需要的补正角度控制第一电机驱动带动置晶平台旋转,从而实现角度补正,提高精度。当取晶平台晶粒角度偏差不超过10
°
时,可实现最终产品
±3°
的目标。
28.晶粒挑拣设备还包括角度偏差检测装置,用于检测晶粒角度偏差。本实施例中,角度偏差检测装置为摄像机。当摄像机检测到晶粒角度偏差时发出角度补偿信息给第一电机,第一电机接到信号,带动置晶平台转动到预定位置,完成角度补偿工作,第一电机采用高精度伺服第一电机,速度快、精度高。
29.如图4所示,晶粒挑拣设备还包括x轴运动组件和y轴运动组件,通过y轴运动组件带动置晶平台沿y轴运动,通过x轴运动组件带动置晶平台沿x轴运动。x轴运动组件和y轴运动组件用于辅助完成角度补偿。
30.本实施例中,y轴运动组件包括第二电机401、第一连接座402、第一丝杆403、第一连接块、第一滑块404和第一导轨,第二电机401安装在第一连接座402上,第一丝杆403的一端与第二电机401的旋转轴连接,第一丝杆403的另一端安装在第一连接座402上,第一导轨安装在第一连接座402上,第一滑块404安装在第一导轨上,第一连接块与第一丝杆403螺纹配合,第一滑块404与第一连接块固定连接,第一安装板101设置在第一滑块404上。第二电机401驱动带动第一丝杆403转动,第一丝杆403转动带动第一连接块在第一丝杆403上移动,进而带动第一滑块404在第一导轨上移动,第一滑块404移动带动第一安装板101移动进而带动置晶平台在y轴上移动。
31.x轴运动组件包括第三电机501、第二连接座502、第二丝杆503、第二连接块504、第二滑块505和第二导轨506,第二丝杆503的一端与第三电机501的旋转轴连接,第二滑块505安装在第二导轨506上,第二连接块504与第二丝杆503螺纹配合,第二滑块505与第二连接块504固定连接,第二连接座502安装在第二滑块505上,第一连接座402安装在第二连接座502上。第三电机501驱动带动第二丝杆503转动,第二丝杆503转动带动第二连接块504在第二丝杆503上移动,进而带动第二滑块505在第二导轨506上移动,第二滑块505移动带动第一安装板101移动进而带动置晶平台在x轴上移动。
32.如图5至图8所示,晶粒挑拣设备还包括顶晶组件,顶晶组件包括第二安装板601、第四电机602、凸轮603、推杆604、固晶头605、滑轨606和第三滑块607,第四电机602安装在
第二安装板601上,凸轮603安装在第四电机602的旋转轴上,推杆604的一端设有轴承608,轴承608与凸轮603接触,固晶头605安装在推杆604的另一端,滑轨606安装在第二安装板601上,第三滑块607安装在推杆604上,滑轨606与第三滑块607配合。第四电机602驱动带动凸轮603转动,由于凸轮603与轴承608接触(凸轮外缘与轴承外缘相切),凸轮603转动带动轴承608转动,同时会推动轴承608使得推杆604在滑轨606和第三滑块607配合下向前移动,进而推动固晶头605向前移动,由于第四电机的旋转角度精确可调,因此可精确调节顶晶头顶出的距离和速度,从而精确控制晶粒所受压力大小,减少吸嘴的磨损,减少换吸嘴的频率。通过采用对压力值的计算间接得出顶晶头顶出距离的计算数值,不仅可以精确控制晶粒受压力的大小,达到自动调整顶出距离的作用,还可减少吸嘴的磨损,减少换吸嘴的频率。
33.如图5所示,顶晶组件还包括弹性复位件,弹性复位件为弹簧609,弹簧609的一端连接推杆604,弹簧609的另一端连接第二安装板601。固晶头复位的过程中,第四电机的旋转轴会反向转,通过弹簧609的弹力使得轴承608和凸轮603无间隙接触,并同时将固晶头605向回拉,实现固晶头复位。固晶头顶出和复位过程中,通过弹簧609的弹力使得轴承608和凸轮603始终无间隙接触。
34.以上参照附图说明了本实用新型的优选实施例,本领域技术人员不脱离本实用新型的范围和实质,可以有多种变型方案实现本实用新型。举例而言,作为一个实施例的部分示出或描述的特征可用于另一实施例以得到又一实施例。以上仅为本实用新型较佳可行的实施例而已,并非因此局限本实用新型的权利范围,凡运用本实用新型说明书及附图内容所作的等效变化,均包含于本实用新型的权利范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。