1.本技术涉及扫地机器人的领域,尤其是涉及一种扫地机器人用集尘盒。
背景技术:
2.作为智能家居的领跑者,扫地机器人在家居清洁、办公清洁方面的作用日益增大,也逐渐成为人们日常清洁工作的重要助手。
3.扫地机器人通常包括带有移动轮的机壳、设置于机壳内的滚扫机构、与滚扫机构衔接的集尘盒,与集尘盒连接的吸气装置以及智能控制系统。其中,集尘盒带有进风口和出风口,进风口与滚扫机构衔接,出风口处设置过滤网且出风口与吸气装置连通。智能控制系统控制扫地机器人的整体运行,在吸气装置和滚扫机构的作用下,地面的杂物由进风口吸入集尘盒,经过过滤网的过滤,杂物留在集尘盒内,风由出风口离开集尘盒进入吸气装置进而被吹出。
4.扫地机器人工作一段时间后,集尘盒内积攒大量杂物,此时需要将集尘盒从机壳内取出,清理后再重新装入机壳。即,集尘盒与机壳之间是分离的。本技术的发明人在研发过程中发现,由于扫地机器人整机内装有电机、风机等震动源,使得集尘盒容易跟随扫地机器人整机的运行而震动,进而使得集尘盒与机壳以及机壳内的其他部件之间存在一定的相对位移,不仅造成集尘盒的稳固度不够,而且容易造成出风口与吸气装置之间产生错位,导致漏风现象。
技术实现要素:
5.为了减轻集尘盒的震动现象,提高集尘盒的稳固度,减小漏风现象,本技术提供一种扫地机器人用集尘盒。
6.本技术提供的一种扫地机器人用集尘盒采用如下的技术方案:
7.一种扫地机器人用集尘盒,包括嵌入扫地机器人的机壳内的带有进风口和出风口的盒体,所述盒体上设置有提拉杆;提拉杆转动连接于盒体,以使提拉杆能够被拉起进而带动取出盒体,或将提拉杆转动贴向盒体以收纳提拉杆;提拉杆上设置有用于与机壳上的弧形块相适配的弧形勾件;盒体嵌入机壳内、且提拉杆转动贴向盒体时,弧形勾件沿弧形块的外部逐渐滑入并包裹于弧形块的外部。
8.通过采用上述技术方案,需要放入集尘盒时,先将集尘盒的盒体置入机壳对应位置,然后,转动提拉杆使之贴向盒体,期间,弧形勾件沿弧形块的外部逐渐滑入并包裹于弧形块的外部。当提拉杆完全贴向盒体,即提拉杆收纳完毕后,由于弧形勾件包裹于弧形块的外部,使得弧形勾件与弧形块之间具有较佳的稳固性,这种稳固性使得弧形勾件与弧形块之间不容易发生相对位移,从而使得盒体与机壳之间不容易发生位移,从而得以有效减轻集尘盒的震动现象,提高集尘盒的稳固度,减小漏风现象。而当需要将集尘盒取出时,先转动拉出提拉杆,期间,弧形勾件沿弧形块的外部逐渐滑出并最终脱离弧形块,之后,上提提拉杆即可将盒体一并带出。
9.再者,本技术将弧形勾件设置于提拉杆上,随着提拉杆的拉起和收纳即可自动实现弧形勾件与弧形块的包裹与否,无需再额外操作弧形勾件与弧形块之间的包裹固定,简化了操作步骤,满足消费者对于操作简便方面的要求。
10.可选的,所述弧形勾件远离提拉杆的一端处设置有凸向弧形勾件内侧的凸起,弧形块的对应位置为拐角,弧形勾件的内表面与凸起分别包裹于拐角的两侧。
11.通过采用上述技术方案,集尘盒的制作材料通常为塑料等,具有一定的弹性形变能力,凸起的设置能够加强对弧形块的拐角的包裹,由此进一步加强弧形勾件与弧形块之间的稳固性,而在提拉杆转动拉出时,可借助弧形勾片的弹性使得弧形勾片滑出,不影响提拉杆以及弧形勾片的正常使用。
12.可选的,所述弧形勾件的外弧面固定设置有加强筋,加强筋的延伸方向沿弧形勾件的延伸方向一致。
13.在集尘盒的使用过程中,由于需要对集尘盒进行清理,所以需要经常去除集尘盒,即,弧形勾片需要经常沿弧形块的外部滑入滑出。本技术通过采用上述技术方案,在弧形勾片的外弧面设置加强筋,能够有效加强弧形勾片的结构强度,提高弧形勾片的耐用性。
14.可选的,所述盒体的出风口处设置盖体,盖体的一端与盒体铰接以开闭盒体,盖体上安装有过滤网;盖体的活动端与盒体之间设置有卡扣组件。
15.通过采用上述技术方案,可开闭的盖体方便对盒体进行清理,卡扣组件的设置能够提高盖体的活动端固定时的稳固性,从而帮助进一步加强集尘盒在机壳内的稳固度。
16.可选的,所述卡扣组件包括与盒体铰接的勾片以及固定安装于盖体对应位置的勾边,勾片与盒体之间设置有弹性件,弹性件驱使勾片翻转并勾于勾边。
17.通过采用上述技术方案,弹性件的作用力有利于提高勾片与勾边之间的稳固性,从而进一步帮助提高盖体的活动端固定时的稳固性,从而帮助进一步加强集尘盒在机壳内的稳固度。
18.可选的,所述弹性件采用弹簧,弹簧的伸缩方向的两端分别与盒体以及勾片连接。
19.通过采用上述技术方案,弹簧的弹性佳,且耐用、结构简单、轻便,适于用作本技术的弹性件。
20.可选的,所述弹簧处的勾片的外表面设置有防滑凸点。
21.通过采用上述技术方案,人手按压勾片以打开卡扣组件时,防滑凸点能够提高人手与勾片之间的摩擦力,帮助避免打滑。
22.可选的,所述盖体内表面的外延处设置有与出风口相适配的密封圈,出风口的外延设置有与密封圈相适配用于容纳密封圈的密封槽。
23.通过采用上述技术方案,一方面,密封槽的设置能够对密封圈以及盖体进行一定的限位,帮助减轻扫地机器人震动时盖体与盒体之间发生的相对位移现象。另一方面,与常规密封圈不同,本技术的盖体闭合时,密封圈位于密封槽内,使得该处盒体内外的通道变的更加弯折,延长了内外空气的流动路径,由此加强了密封性能。
24.可选的,所述盒体的外表面设置有收纳提拉杆的收纳槽。
25.通过采用上述技术方案,提拉杆翻转贴向盒体后可收纳于收纳槽内,减小集尘盒嵌入机壳时的占地面积。
26.可选的,所述盒体的外表面设置有便于抓取提拉杆的让位槽。
27.通过采用上述技术方案,翻转拉出提拉杆时,便于人手抓握提拉杆,提高消费者使用的舒适度。
28.综上所述,本技术包括以下有益技术效果:
29.1、本技术通过弧形勾件与弧形块之间的包裹提升了盒体与机壳之间的稳固性,从而有效减轻了集尘盒的震动现象,提高了集尘盒的稳固度,减小了漏风现象;
30.2、本技术将弧形勾件设置于提拉杆上,随着提拉杆的拉起和收纳即可自动实现弧形勾件与弧形块的包裹与否,无需再额外操作弧形勾件与弧形块之间的包裹固定,简化了操作步骤,满足消费者对于操作简便方面的要求;
31.3、本技术在盖体的活动端与盒体之间设置卡扣组件,能够提高盖体的活动端固定时的稳固性,从而帮助进一步加强集尘盒在机壳内的稳固度;
32.4、本技术在盖体内表面设置密封圈,在盒体的出风口的外延设置有与密封圈相适配用于容纳密封圈的密封槽。密封槽的设置不仅能够对盖体进行限位,帮助减轻盖体位移,而且,由于密封圈位于密封槽内,由此能够延长了内外空气的流动路径,由此进一步加强密封性能。
附图说明
33.图1是本技术实施例的集尘盒嵌入机壳内时的俯视图;
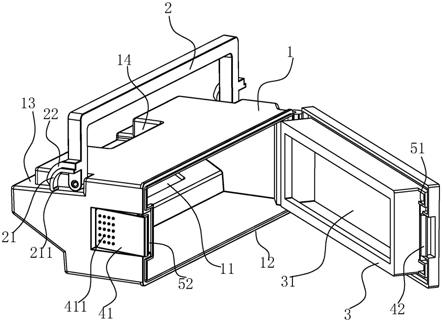
34.图2是将图1中的集尘盒从机壳内爆出时的局部结构示意图;
35.图3是体现集尘盒盖体打开时的结构示意图;
36.图4是体现集尘盒盖体闭合时的结构示意图。
37.附图标记说明:1、盒体;11、进风口;12、出风口;13、收纳槽;14、让位槽;2、提拉杆;21、弧形勾件;211、凸起;22、加强筋;3、盖体;31、过滤网;41、勾片;411、防滑凸点;42、勾边;51、密封圈;52、密封槽;6、机壳;61、安装槽;62、弧形块;621、拐角。
具体实施方式
38.以下对本技术作进一步详细说明。
39.本技术实施例公开一种扫地机器人用集尘盒,参照图1,包括嵌入扫地机器人的机壳6的安装槽61内的盒体1,盒体1上设置有提拉杆2和盖体3,结合图2,提拉杆2上设置有用于与机壳6上的弧形块62相适配的弧形勾件21,盖体3与盒体1之间设置有卡扣组件和密封组件。
40.在本实施例中,如图3所示,盒体1为长条状的盒状结构,带有进风口11和出风口12。出风口12位于盒体1的长度方向的一个竖直侧面处,为长方形开口。结合图4,盒体1上与出风口12相对的侧面的下部向内倾斜,使得该侧面上形成一个倾斜的表面,进风口11开设于该表面上。
41.回看图3,盒体1的上部设置有一u型的提拉杆2。提拉杆2的两端分别铰接于盒体1的长度方向的两端处,使得提拉杆2能够在盒体1上翻转,铰接轴与盒体1的水平宽度方向平行。盒体1的顶部且远离出风口12的一侧内凹形成一与提拉杆2对应的u性的收纳槽13,提拉杆2向远离出风口12一侧转动至水平时嵌入收纳槽13内。盒体1的顶部切远离出风口12的一侧的中部下凹形成一让位槽14,便于人手抓取提拉杆2。
42.结合图2,提拉杆2的两端各设置有一弧形勾件21,安装槽61内设置有两个与弧形勾件21对应的弧形块62。
43.如图3所示,提拉杆2转动离开收纳槽13且呈竖直状态时,弧形勾件21的一端固定连接于提拉杆2的对应的u型侧壁上,另一端先向远离出风口12一侧以弧形延伸进而向下以弧形延伸,且延伸终端向弧形内侧鼓起形成以凸起211。弧形勾件21的外表面固定设置有加强筋22,加强筋22呈与弧形勾件21相匹配的弧形。
44.结合图2,弧形块62的远离出风口12的表面呈与弧形勾片41相对应的弧形,且靠近出风口12的一侧的底部形成一拐角621。当集尘盒置入安装槽61,下翻提拉杆2时,弧形勾片41沿对应的弧形块62的弧形的外表面下滑,当提拉杆2下翻至水平状态时,弧形勾片41包裹于弧形块62外且凸起211位于拐角621靠近出风口12的一侧。
45.参照图3,盖体3位于出风口12处,与出风口12的形状相匹配。盖体3上安装有过滤网31。盖体3的长度方向的一端与盒体1铰接,铰接轴位于竖直面内,另一端处设置有卡扣组件。
46.卡扣组件包括与盒体1铰接的勾片41以及固定安装于盖体3对应位置的勾边42。勾片41整体呈竖直设置的长方体片状结构,片状的中间部位与盒体1铰接,铰接轴位于竖直面内。勾片41用于与勾边42对应勾挂的勾状结构位于靠近盖体3的一侧。勾片41远离盖体3的一侧的外表面设置有防滑凸点411,远离盖体3的一侧的内表面与盒体1之间设置有弹簧(附图中未示出),弹簧伸缩方向的两端分别与勾片41和盒体1固定连接。按压勾片41的防滑凸点411处,勾片41靠近盖体3的一侧外翻从而与勾边42脱离,之后,可将盖体3打开。
47.盖体3内表面的外延处设置有与出风口12相适配的密封圈51,出风口12的外延设置有与密封圈51相适配用于容纳密封圈51的密封槽52。盖体3闭合后,密封圈51嵌入密封槽52内。
48.本实施例的上述盒体1、提拉杆2、弧形勾件21、凸起211、加强筋22、盖体3、勾片41、勾边42、机壳6、弧形块62等部件均可以采用塑料材质。其中,盒体1可采用透明塑料,便于观察盒体1内的杂物。
49.本技术实施例的一种扫地机器人用集尘盒的实施原理为:参照图2,需要放入集尘盒时,先将集尘盒的盒体1置入机壳6的安装槽61内,然后,转动提拉杆2使之贴向盒体1,期间,弧形勾件21以及凸起211沿弧形块62的外部逐渐滑入并包裹于弧形块62的外部。当提拉杆2完全贴向盒体1,即提拉杆2收纳完毕后,由于弧形勾件21包裹于弧形块62的外部,使得弧形勾件21与弧形块62之间具有较佳的稳固性,这种稳固性使得弧形勾件21与弧形块62之间不容易发生相对位移,从而使得盒体1与机壳6之间不容易发生位移,从而得以有效减轻集尘盒的震动现象,提高集尘盒的稳固度,减小漏风现象。而当需要将集尘盒取出时,先转动拉出提拉杆2,期间,弧形勾件21以及凸起211沿弧形块62的外部逐渐滑出并最终脱离弧形块62,之后,上提提拉杆2即可将盒体1一并带出。
50.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。