1.本实用新型涉及绝缘子检测机器人,尤其涉及一种抗高电压干扰的绝缘子检测机器人。
背景技术:
2.为了保障电力输电线路安全运行,每隔几年需要对架空输电线路绝缘子串检测一次,随着国内智能装备、人工智能技术的发展,对绝缘子串检测机器人的研究也处于起步阶段。其中,高电压会导致绝缘子机器人的电弧放电,电弧能量巨大,很容易损坏绝缘子检测机器人内部控制系统和检测系统,另外高压环境下电场磁场强度大,对绝缘子检测机器人构成强电磁干扰,严重干扰了机器人的正常运行。
3.现有技术中,对绝缘子进行检测的设备和手段请参见公开号为cn207601226u,名称为一种带屏蔽抗强电磁场干扰的绝缘子检测系统的中国专利公开文献,其中记载了一种抗强电磁场干扰的措施,在检测探头设置有图像传感器,图像传感器采集火花图像信号数据,并使用光纤将所述火花图像信号数据传输到接收装置,所述的接收装置设置有光电转换模块,通过光电转换模块把接收到的光信号转换为电子信号。使用光纤将探头采集的间隙放电火花图像数据传输到接收装置,在高电压,强电场环境下,信号数据传输不受干扰,保障无人机飞行测试的正常进行。上述公开文献仅记载了利用摄像头和图像传感器靠近绝缘子高压环境,没有解决摄像头和图像传感器如何抗高压干扰等问题。
4.由此可见,现有技术中亟需一种可实现绝缘子检测机器人在高电压环境下稳定可靠的运行的抗高压干扰结构。
技术实现要素:
5.本实用新型要解决的技术问题在于,针对现有技术的不足,提供一种通过对机器人各层结构材料的合理选取、分层结构的合理布置以及优化绝缘屏蔽设计措施,实现在高电压环境下稳定可靠运行的抗高电压干扰绝缘子检测机器人。
6.为解决上述技术问题,本实用新型采用如下技术方案。
7.一种抗高电压干扰的绝缘子检测机器人,其包括有控制箱、检测箱、多层屏蔽电缆、第一探针机构和第二探针机构,其中:所述控制箱包括有第一聚四氟乙烯外壳,所述第一聚四氟乙烯外壳的内侧设有第一铝壳且二者之间填充有硅胶,所述第一铝壳的内侧设有第一尼龙壳且二者之间填充有硅胶,所述第一尼龙壳内设有机器人控制板;所述检测箱包括有第二聚四氟乙烯外壳,所述第二聚四氟乙烯外壳的内侧设有第二铝壳且二者之间填充有硅胶,所述第二铝壳的内侧设有第二尼龙壳且二者之间填充有硅胶,所述第二尼龙壳内设有机器人检测板卡;所述多层屏蔽电缆的屏蔽层连接于所述控制箱与所述检测箱之间,所述多层屏蔽电缆中心处的导线电性连接于所述机器人控制板与所述机器人检测板卡之间,所述第一探针机构和第二探针机构分别与所述机器人检测板卡电性连接。
8.优选地,所述多层屏蔽电缆包括有第一聚四氟乙烯外皮,所述第一聚四氟乙烯外
皮的内侧设有第一铜箔层,所述第一铜箔层的内侧设有第一硅胶皮层,所述导线穿设于所述第一硅胶皮层内。
9.优选地,所述第一聚四氟乙烯外皮的两端分别与所述第一聚四氟乙烯外壳和所述第二聚四氟乙烯外壳粘合固定,所述第一铜箔层的两端分别与所述第一铝壳和所述第二铝壳粘合固定,所述第一硅胶皮层的两端分别与所述第一尼龙壳和所述第二尼龙壳粘合固定。
10.优选地,所述第一铜箔层与所述第一铝壳和所述第二铝壳之间分别通过导电胶粘合固定,所述第一硅胶皮层与所述第一尼龙壳和所述第二尼龙壳之间分别通过绝缘胶粘合固定。
11.优选地,所述第一探针机构与所述第二探针机构之间固定有探针连杆。
12.优选地,所述第一探针机构包括有聚四氟乙烯圆筒,所述聚四氟乙烯圆筒的内侧设有空心铜柱,所述空心铜柱的内侧设有尼龙空心柱,所述尼龙空心柱内穿设有探针头,且所述探针头向所述尼龙空心柱的外侧延伸预设长度,所述第二探针机构的结构与所述第一探针机构的结构相同。
13.优选地,所述探针头为钢质弹簧探针。
14.优选地,所述第一探针机构包括有探针连接线,所述探针连接线包括有第二四氟乙烯外皮,所述第二四氟乙烯外皮的内侧设有第二铜箔层,所述第二铜箔层的内侧设有第二硅胶皮层,所述第二硅胶皮层内穿设有探针连接线,所述探针连接线电性连接于所述探针头与所述机器人检测板卡之间。
15.优选地,所述第二四氟乙烯外皮与所述聚四氟乙烯圆筒之间通过绝缘胶粘合固定,所述第二铜箔层与所述空心铜柱焊接固定,所述第二硅胶皮层与所述尼龙空心柱通过绝缘胶粘合固定,所述探针连接线与所述探针头焊接固定。
16.优选地,所述第二四氟乙烯外皮与所述第二聚四氟乙烯外壳之间通过绝缘胶粘合固定,所述第二铜箔层与所述第二铝壳焊接固定,所述第二硅胶皮层与所述第二尼龙壳通过绝缘胶粘合固定,所述探针连接线与所述机器人检测板卡电性连接。
17.本实用新型公开的抗高电压干扰的绝缘子检测机器人中,所述控制箱和所述检测箱的箱体部分采用了相同的分层结构,其中,箱体最外层采用聚四氟乙烯材料,因聚四氟乙烯绝的缘性能好,所以能有效隔绝电晕和电弧放电,位于中间层的铝壳是用于当有电弧和电晕放电突破了聚四氟乙烯绝缘层时,可以将电引到铝壳上,利用铝壳来保证侵入电荷均匀分布,进而对内部板卡形成稳定的电磁场屏蔽,形成等电位效果,且不会对内部板卡放电,箱体最内层采用尼龙材料,尼龙材料层可以更进一步的隔绝铝壳和板卡,进一步杜绝了铝壳上的电荷对内部板卡放电,极大地保护了内部板卡。基于上述原理可见,本实用新型通过对机器人各层结构材料的合理选取、分层结构的合理布置以及优化绝缘屏蔽设计措施,使其能够在高电压环境下稳定可靠运行,较好地满足了应用需求。
附图说明
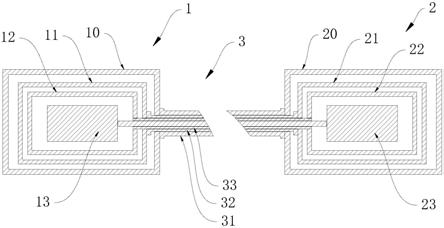
18.图1为控制箱、检测箱和多层屏蔽电缆的结构图一;
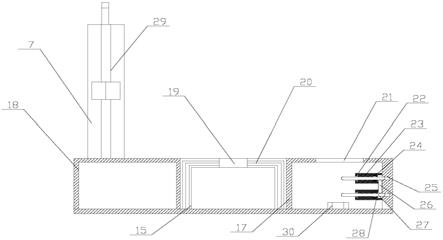
19.图2为控制箱、检测箱和多层屏蔽电缆的结构图二;
20.图3为图2中沿b
‑
b线的剖视图;
21.图4为第一探针机构和第二探针机构的结构图一;
22.图5为第一探针机构和第二探针机构的结构图二;
23.图6为第一探针机构和第二探针机构的正视图;
24.图7为图6中沿a
‑
a线的剖视图;
25.图8为第一探针机构和第二探针机构与绝缘子的结构图一;
26.图9为第一探针机构和第二探针机构与绝缘子的结构图二。
具体实施方式
27.下面结合附图和实施例对本实用新型作更加详细的描述。
28.本实用新型公开了一种抗高电压干扰的绝缘子检测机器人,结合图1至图9所示,其包括有控制箱1、检测箱2、多层屏蔽电缆3、第一探针机构4和第二探针机构5,其中:
29.所述控制箱1包括有第一聚四氟乙烯外壳10,所述第一聚四氟乙烯外壳10的内侧设有第一铝壳11且二者之间填充有硅胶,所述第一铝壳11的内侧设有第一尼龙壳12且二者之间填充有硅胶,所述第一尼龙壳12内设有机器人控制板13;
30.所述检测箱2包括有第二聚四氟乙烯外壳20,所述第二聚四氟乙烯外壳20的内侧设有第二铝壳21且二者之间填充有硅胶,所述第二铝壳21的内侧设有第二尼龙壳22且二者之间填充有硅胶,所述第二尼龙壳22内设有机器人检测板卡23;
31.所述多层屏蔽电缆3的屏蔽层连接于所述控制箱1与所述检测箱2之间,所述多层屏蔽电缆3中心处的导线30电性连接于所述机器人控制板13与所述机器人检测板卡23之间,所述第一探针机构4和第二探针机构5分别与所述机器人检测板卡23电性连接。
32.上述结构中,所述控制箱1和所述检测箱2的箱体部分采用了相同的分层结构,其中,箱体最外层采用聚四氟乙烯材料,因聚四氟乙烯绝的缘性能好,所以能有效隔绝电晕和电弧放电,位于中间层的铝壳是用于当有电弧和电晕放电突破了聚四氟乙烯绝缘层时,可以将电引到铝壳上,利用铝壳来保证侵入电荷均匀分布,进而对内部板卡形成稳定的电磁场屏蔽,形成等电位效果,且不会对内部板卡放电,箱体最内层采用尼龙材料,尼龙材料层可以更进一步的隔绝铝壳和板卡,进一步杜绝了铝壳上的电荷对内部板卡放电,极大地保护了内部板卡。基于上述原理可见,本实用新型通过对机器人各层结构材料的合理选取、分层结构的合理布置以及优化绝缘屏蔽设计措施,使其能够在高电压环境下稳定可靠运行,较好地满足了应用需求。
33.关于所述多层屏蔽电缆3的具体结构,本实施例中,所述多层屏蔽电缆3包括有第一聚四氟乙烯外皮31,所述第一聚四氟乙烯外皮31的内侧设有第一铜箔层32,所述第一铜箔层32的内侧设有第一硅胶皮层33,所述导线30穿设于所述第一硅胶皮层33内。
34.作为一种优选方式,所述第一聚四氟乙烯外皮31的两端分别与所述第一聚四氟乙烯外壳10和所述第二聚四氟乙烯外壳20粘合固定,所述第一铜箔层32的两端分别与所述第一铝壳11和所述第二铝壳21粘合固定,所述第一硅胶皮层33的两端分别与所述第一尼龙壳12和所述第二尼龙壳22粘合固定。
35.进一步地,所述第一铜箔层32与所述第一铝壳11和所述第二铝壳21之间分别通过导电胶粘合固定,所述第一硅胶皮层33与所述第一尼龙壳12和所述第二尼龙壳22之间分别通过绝缘胶粘合固定。
36.上述结构中,所述多层屏蔽电缆3与控制箱1和检测箱2之间均通过分层连接,从而构成一个完整连贯的高压电磁屏蔽系统。
37.本实施例中,所述第一探针机构4与所述第二探针机构5之间固定有探针连杆6。
38.关于两个探针机构的具体结构,本实施例中,所述第一探针机构4包括有聚四氟乙烯圆筒40,所述聚四氟乙烯圆筒40的内侧设有空心铜柱41,所述空心铜柱41的内侧设有尼龙空心柱42,所述尼龙空心柱42内穿设有探针头43,且所述探针头43向所述尼龙空心柱42的外侧延伸预设长度,所述第二探针机构5的结构与所述第一探针机构4的结构相同。
39.作为一种优选方式,所述探针头43为钢质弹簧探针。
40.上述结构中,钢质弹簧探针具有一定的弹性形变,能够保障探针头与绝缘子的片钢帽良好接触。
41.作为一种优选方式,所述第一探针机构4包括有探针连接线7,所述探针连接线7包括有第二四氟乙烯外皮70,所述第二四氟乙烯外皮70的内侧设有第二铜箔层71,所述第二铜箔层71的内侧设有第二硅胶皮层72,所述第二硅胶皮层72内穿设有探针连接线73,所述探针连接线73电性连接于所述探针头43与所述机器人检测板卡23之间。
42.本实施例中,所述第二四氟乙烯外皮70与所述聚四氟乙烯圆筒40之间通过绝缘胶粘合固定,所述第二铜箔层71与所述空心铜柱41焊接固定,所述第二硅胶皮层72与所述尼龙空心柱42通过绝缘胶粘合固定,所述探针连接线73与所述探针头43焊接固定。
43.进一步地,所述第二四氟乙烯外皮70与所述第二聚四氟乙烯外壳20之间通过绝缘胶粘合固定,所述第二铜箔层71与所述第二铝壳21焊接固定,所述第二硅胶皮层72与所述第二尼龙壳22通过绝缘胶粘合固定,所述探针连接线73与所述机器人检测板卡23电性连接。
44.上述结构中,探针头是钢质弹簧,其处于高压环境下容易引起放电现象,为了最大限度的减小放电干扰,采用了上述三层屏蔽方法,即:利用四氟乙烯圆筒阻挡高压电弧放电,当电弧穿透第一层防护四氟乙烯圆筒后,电荷会被空心铜柱引导致整个绝缘子内部金属屏蔽层,形成等电位状态,防止电荷对机器人内部板卡放电,尼龙空心柱用于保护探针头,避免空心铜柱上的电荷传导至探针头上。
45.本实用新型绝缘子检测机器人在工作过程中,其第一探针机构4和第二探针机构5分设于待检测的绝缘子100两侧,利用所述探针连杆6将所述第一探针机构4与所述第二探针机构5相对固定,检测过程中,绝缘子检测机器人的动作执行机构驱使第一探针机构4和第二探针机构5上下摆动,使得第一探针机构4和第二探针机构5分别与绝缘子100两侧的钢帽101接触,通过测量两个探针头之间的电阻值来判断绝缘子100的状态和性能。在检测过程中,因合理选取和布置箱体和线缆的分层结构,大大优化了绝缘屏蔽性能,使本实用新型机器人在高电压环境下不仅能稳定可靠运行,还能精准反馈检测数据,较好地满足了应用需求。
46.以上所述只是本实用新型较佳的实施例,并不用于限制本实用新型,凡在本实用新型的技术范围内所做的修改、等同替换或者改进等,均应包含在本实用新型所保护的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。