1.本技术涉及清洗设备的领域,特别是涉及一种清洁清洗平台。
背景技术:
2.目前,在生产清洁剂的过程中,用于存放清洁剂的各种容器在使用过后表面会粘附有一部分污渍,因此需要定期对容器进行清洗,在清洗时,需要用到清洗平台。
3.相关技术中有一种清洗平台,参照图1,清洗平台包括基板1、围板2以及四个支脚5,四个支脚5均固定连接在基板1底端,围板2固定连接在基板1背离支脚5一侧的边缘。使用时,操作者将容器放置在基板1上由围板2围成的范围内,并对容器进行冲洗。
4.针对上述中的相关技术,发明人认为,当污渍从容器上被冲刷掉之后,由于围板的阻挡,污渍仍然留在基板上,存在再次将容器污染的可能,对清洗效果造成影响。
技术实现要素:
5.相关技术中,留在基板上的污渍容易再次污染容器,对清洗效果造成影响,为了改善这一缺陷,本技术提供一种清洁清洗平台。
6.本技术提供的一种清洁清洗平台,采用如下的技术方案得出:
7.一种清洁清洗平台,包括基板、设于基板上的抬升组件以及设于基板外周的围板,所述围板垂直于基板,所述抬升组件包括设于围板内侧的清洗套盒、设于基板外侧的踏板以及设于清洗套盒与踏板之间的传动件,所述清洗套盒底端开设有排水口,所述清洗套盒和踏板均沿垂直于基板的方向滑移设置在围板上,且所述踏板通过传动件与清洗套盒传动连接。
8.通过上述技术方案,操作时,操作者踩动踏板,使踏板向下移动,踏板通过传动件带动清洗套盒上移,使清洗套盒远离基板,然后操作者再向清洗套盒内通入水流,水流对清洗套盒内的容器进行冲刷,容器上的污渍在水流的带动下经过排水口落到基板上,在清洗过程中,容器与落到基板上的污渍始终相互间隔,从而减少了污渍再次将容器污染的可能,提高了清洗容器的效果。
9.优选的:所述传动件包括与踏板固定连接的第一齿条、与第一齿条啮合的第一齿轮、与第一齿轮同轴连接的多个第二齿轮以及固定连接于清洗套盒朝向围板一侧的多个第二齿条,所述第一齿轮和第二齿轮均与围板转动连接,所述第二齿条与第二齿轮一一对应,并相互啮合,所述围板内侧壁上开设有用于容纳第二齿条的通槽。
10.通过上述技术方案,操作时,操作者踩动踏板,踏板通过第一齿条带动第一齿轮转动,第一齿轮带动多个第二齿轮同时转动,第二齿轮通过第二齿条带动清洗套盒移动。清洗套盒移动时,多个第二齿条共同承担清洗套盒的重量,使清洗套盒的压力均匀分散在多个第二齿条上,从而减少了第二齿条受压时发生变形的可能,提高了操作时的稳定性。
11.优选的:所述第二齿轮的直径大于第一齿轮的直径。
12.通过上述技术方案,当第一齿轮与第二齿轮转动时,由于第二齿轮的直径大于第
一齿轮的直径,因此第二齿轮的轮缘转过的距离大于第一齿轮的轮缘转过的距离,因此使得第第二齿条移动的距离大于第一齿条移动的距离,从而缩短了抬升清洗套盒时踏板需要移动的距离,提高了操作的便捷度。
13.优选的:所述围板上设有用于固定清洗套盒位置的定位组件,所述定位组件包括与第二齿轮同轴连接的棘轮以及转动连接在围板上的棘爪,所述棘轮的棘齿上设有弧形工作面和径向工作面,所述棘爪靠近围板的一侧固定连接有压缩弹簧,所述压缩弹簧的另一端与围板固定连接,所述棘爪与棘轮抵触。
14.通过上述技术方案,当操作者踩动踏板时,棘轮与第二齿轮同时转动,棘齿在压缩弹簧的作用下与棘齿的弧形工作面抵触,并在弧形工作面的推动下转动,此时棘爪能够越过棘轮,棘轮随第二齿轮转动。当操作者停止踩踏踏板时,清洗套盒在重力的作用下向基板所在的方向回落,并带动棘轮沿相反的方向转动,直到棘爪与棘齿的径向工作面抵触。此后,棘爪对棘轮进行限位,棘轮与第二齿轮均停止转动,因此清洗套盒无法继续下落,从而实现了对清洗套盒位置的固定。在操作过程中,当清洗套盒远离基板后,操作者即使松开踏板,清洗套盒也无法自动下落,从而使得操作者无需持续对踏板进行踩踏,提高了操作的便捷度。
15.优选的:所述定位组件还包括柔性绳以及固定连接于柔性绳远离棘爪的一端的牵引块,所述围板上开设有牵引孔,所述柔性绳远离牵引块的一端穿设过牵引孔,并与所述棘爪固定连接。
16.通过上述技术方案,当需要使清洗套盒重新落回到基板上时,操作者通过牵引块拉动柔性绳,使棘爪在柔性绳的牵引下远离棘轮,即可解除对棘轮的限位。此后,清洗套盒在重力的作用下自由下落,直到落到基板上。清洗套盒落到基板上后,操作者释放牵引块,压缩弹簧带动柔性绳和牵引块移动,直到牵引块与围板的外侧壁抵触,即可使棘爪复位。通过柔性绳的设置,操作者无需拆卸棘轮即可使清洗套盒下落,从而提高了操作的便捷度。
17.优选的:所述牵引块靠近柔性绳的一侧固定连接有橡胶环,所述橡胶环与围板的外侧壁抵触。
18.通过上述技术方案,在棘爪复位的过程中,当牵引块与围板抵触时,橡胶环对牵引块进行缓冲,使围板对牵引块的冲击力减小,从而对牵引块起到了了保护作用。
19.优选的:所述清洗套盒朝向基板的一侧固定连接有海绵层,所述基板上穿设并固定连接有排水管。
20.通过上述技术方案,在冲洗过程中,携带有污渍的水流依次经过排水口和海绵层,最终从排水管离开。当水流经过海绵层时,海绵层对物资处进行吸附,从而起到了净水作用。此外,当清洗套盒复位时,海绵层还能够起到缓冲作用,以减少清洗套盒因受到冲击而破损的可能。
21.优选的:所述清洗套盒背离基板的一侧设有防滑纹。
22.通过上述技术方案,当操作者将容器放置在清洗套盒上时,防滑纹增大了清洗套盒与容器之间的摩擦力,使得容器受到水流的冲击时不容易滑动,从而减少了容器之间因相互碰撞而损坏的可能,起到了保护容器的效果。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.操作时,操作者踩动踏板,踏板通过传动件带动清洗套盒上升,然后操作者再对
容器进行冲洗,从而减少了水流中携带的污渍再次对容器造成污染的可能,提高了清洗效果;
25.2.通过棘轮和棘爪的设置,当操作者不再踩动踏板时,棘爪将通过棘轮对清洗套盒进行限位,从而使操作者在操作过程中无需时刻踩踏踏板,提高了操作的便捷度。
附图说明
26.图1是相关技术中清洗平台的整体结构示意图。
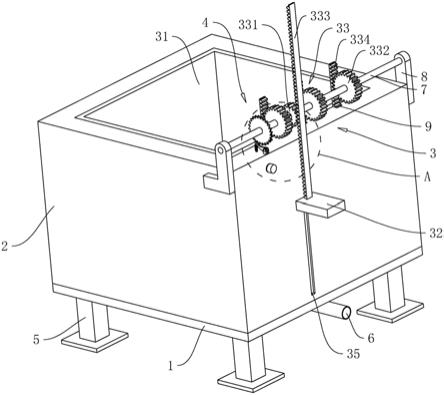
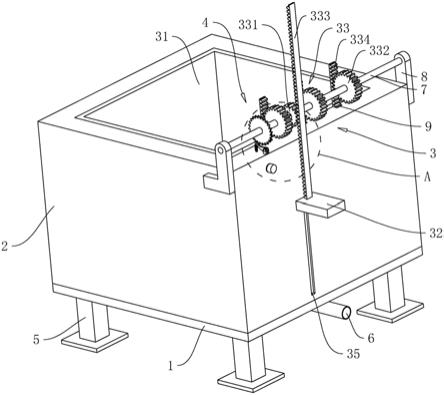
27.图2是本技术实施例的清洁清洗平台的整体结构示意图。
28.图3是本技术实施例用于展示滑块与踏板位置关系的结构示意图。
29.图4是本技术实施例用于展示海绵层位置的结构示意图。
30.图5是图2中a部的放大图。
31.附图标记:1、基板;2、围板;3、抬升组件;31、清洗套盒;32、踏板;33、传动件;331、第一齿轮;332、第二齿轮;333、第一齿条;334、第二齿条;34、滑块;35、滑槽;4、定位组件;41、棘轮;411、弧形工作面;412、径向工作面;42、棘爪;43、柔性绳;44、牵引块;5、支脚;6、排水管;7、转轴;8、支座;9、通槽;10、排水口;11、防滑纹;12、海绵层;13、压缩弹簧;14、牵引孔;15、橡胶环。
具体实施方式
32.以下结合附图2
‑
5对本技术作进一步详细说明。
33.本技术实施例公开了一种清洁清洗平台。参照图2,清洁清洗平台包括基板1、围板2、抬升组件3以及定位组件4,抬升组件3和定位组件4均设于围板2上,基板1的形状为矩形,围板2围设于基板1边缘,基板1底端固定连接有四个支脚5和一个排水管6,排水管6将基板1贯穿,且排水管6的一端伸到基板1的一侧。操作时,操作者先将容器放置在围板2内侧,并通过抬升组件3抬升容器的位置,再通过定位组件4对容器的位置进行固定,然后再向围板2内侧引入水流,水流对容器进行清洗后携带着污渍经过排水管6离开基板1。
34.参照图2和图3,抬升组件3包括清洗套盒31、踏板32以及传动件33,清洗套盒31设于围板2内侧,并沿竖直方向与围板2滑移配合;踏板32设于围板2外侧,踏板32的一端固定连接有滑块34,围板2的外侧壁上开设有滑槽35,滑块34与滑槽35滑移配合,且滑块34的横截面形状为梯形,滑块34的横截面宽度沿踏板32朝向围板2的方向逐渐增大,以对踏板32进行限位。
35.参照图2,传动件33包括第一齿轮331、第二齿轮332、第一齿条333以及第二齿条334,第一齿条333与踏板32顶端固定连接,并垂直于踏板32,第一齿条333与第一齿轮331啮合,第二齿轮332设有三个,第一齿轮331通过转轴7与三个第二齿轮332同轴设置并固定连接,转轴7通过支座8与围板2转动连接,第二齿轮332的直径大于第一齿轮331的直径。第二齿条334共设有三个,三个第二齿条334均与清洗套盒31朝向围板2的一侧固定连接,围板2朝向清洗套盒31的一侧开设有三个通槽9,第二齿条334与通槽9一一对应,并滑移设置在通槽9内,第二齿轮332与第二齿条334一一对应,并相互啮合。
36.参照图2,当需要抬升清洗套盒31时,操作者踩动踏板32,踏板32带动第一齿条333向下移动,第一齿条333通过第一齿轮331带动转轴7转动,转轴7带动三个第二齿轮332同时
转动,第二齿轮332通过第二齿条334带动清洗套盒31向上移动,从而对放置在清洗套盒31内的容器进行了抬升。在抬升时,三个第二齿轮332共同对清洗套盒31进行抬升,从而将清洗套盒31的压力均匀分散到了三个第二齿条334上,使第二齿条334在抬升清洗套盒31时不容易变形,提高了操作时的稳定度。由于第二齿轮332的直径大于第一齿轮331的直径,因此清洗套盒31上升的距离大于操作者踩动踏板32的距离,从而提高了操作的便捷度。
37.参照图2和图4,清洗套盒31的底壁上开设有排水口10,清洗套盒31背离基板1的一侧设有防滑纹11,清洗套盒31朝向基板1的一侧粘接有海绵层12。在冲洗容器时,防滑纹11增大了容器与清洗套盒31之间的摩擦力,使容器在水流的冲击下能够保持位置稳定,减少了容器之间因发生相互碰撞而出现破损的可能。通过海绵层12的设置,当水流经过时,海绵层12对水流携带的污渍进行吸附,起到了净水的效果,降低了冲洗过程中产生的废水的回收处理难度。此外,当清洗结束,清洗套盒31下落时海绵层12还能够起到缓冲作用,使清洗套盒31不易因为与基板1发生撞击而破损。
38.参照图2和图4,操作时,操作者将待清洗的容器放置在清洗套盒31内,然后再踩动踏板32,踏板32向下移动时通过传动件33带动清洗套盒31上升,然后操作者再接入水流,水流对清洗套盒31内的容器进行清洗。清洗时,污渍离开容器表面后,随水流依次穿过排水口10和海绵层12,经过海绵层12的吸收后,残余的污渍随水流汇集到基板1上,并经过排水管6离开基板1。清洗结束后,操作者取出容器,再释放清洗套盒31,清洗套盒31在重力的作用下落回到基板1上。在清洗过程中,由于污渍在水流的带动下经过排水口10离开清洗套盒31,因此减少了水流中的污渍重新对容器造成污染的可能,提高了清洗容器时的效果。
39.参照图2和图5,定位组件4包括棘轮41、棘爪42、柔性绳43以及牵引块44,棘轮41通过转轴7与第二齿轮332同轴设置并固定连接,且棘轮41的棘爪42设有弧形工作面411和径向工作面412。棘爪42与围板2顶端的端面转动连接,棘爪42背离棘轮41的一侧设有压缩弹簧13,压缩弹簧13的一端与棘爪42上远离转动轴心的一端固定连接,另一端与与围板2固定连接。围板2上在棘爪42所在的位置开设有牵引孔14,牵引孔14与围板2的外侧壁贯通。柔性绳43的一端与棘爪42背离棘轮41的一侧固定连接,另一端依次穿过压缩弹簧13和牵引孔14,并延伸到牵引孔14位于围板2外侧壁上的端口外侧。牵引块44与柔性绳43远离棘爪42的一端固定连接,且牵引块44朝向围板2的一侧固定连接有橡胶环15,橡胶环15与围板2的外侧壁抵触。
40.参照图2和图5,当清洗套盒31上升时,转轴7带动棘轮41转动,此时棘爪42在压缩弹簧13的作用下与棘轮41的弧形工作面411抵触,因此棘轮41的转动不受限制。当操作者停止释放踏板32时,清洗套盒31在自身重力的作用下下落,并带动棘轮41沿相反的方向转动,棘轮41的转动方向改变后,棘爪42立刻与棘轮41的径向工作面412抵触,从而对棘轮41进行了限位,使棘轮41停止转动,同时棘轮41通过转轴7、第二齿轮332以及第二齿条334对清洗套盒31进行限位,使清洗套盒31停止下落,从而实现了对清洗套盒31的固定,使操作者不需要持续对踏板32进行踩踏,提高了操作的便捷度。当需要解除对清洗套盒31的固定时,操作者通过牵引块44拉动柔性绳43,使棘爪42转动并远离棘轮41,即可使棘轮41自由转动。此时,清洗套盒31将自由下落,直到与基板1接触。然后,操作者再释放牵引块44,压缩弹簧13的弹性恢复,并带动牵引块44,直到橡胶环15与围板2抵触,此时,棘爪42重新回到棘轮41的转动范围内,完成了复位。当牵引块44与围板2抵触时,橡胶环15对牵引块44进行缓冲,以减
少牵引块44受到冲击力后发生损坏的可能。
41.本技术实施例一种清洁清洗平台的实施原理为:操作时,操作者将待清洗的容器放置在清洗套盒31内,然后踩动踏板32,踏板32通过传动件33带动清洗套盒31远离基板1向上移动,然后操作者再接入水流对容器进行清洗。水流将污渍清洗掉后,污渍经过排水口10离开清洗套盒31,从而减少了容器再次与污渍接触的可能,提高了清洗容器的效果。通过定位组件4的设置,操作者无需时刻对踏板32进行踩踏,从而提高了操作的便捷度。
42.本具体实施例仅仅是对本技术的解释,其并不是对本技术的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本技术的权利要求范围内都受到专利法的保护。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。