1.本实用新型涉及自动驾驶汽车技术领域,尤其涉及一种自动驾驶巡游车转向控制机构。
背景技术:
2.自动驾驶汽车又称无人驾驶汽车、电脑驾驶汽车、或轮式移动机器人,是一种通过电脑系统实现无人驾驶的智能汽车。自动驾驶汽车依靠人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作,让电脑可以在没有任何人类主动的操作下,自动安全地操作机动车辆。
3.但是现有技术中,现有的自动驾驶巡游车转向控制机构,可以在自动驾驶巡游车行驶的时候改变行驶方向,但是一些自动驾驶巡游车转向控制机构没有安装自动调节转向机构,需要手动改变自动驾驶巡游车的行驶方向,增加人力的使用,同时不能准确的行驶指定的路线。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,安装了自动调节转向机构,不需要手动改变巡游车的行驶方向,减少人力的使用,同时可以准确的行驶指定的路线。
5.为了实现上述目的,本实用新型采用了如下技术方案:一种自动驾驶巡游车转向控制机构,包括蜗轮,所述蜗轮的底部固定安装有旋转杆,所述旋转杆的底部互动安装有传动杆,所述传动杆远离旋转杆的一侧活动安装有第一安装杆,所述第一安装杆的外表面活动套设有第一移动杆,所述第一移动杆远离第一安装杆的一侧活动套设有第二安装杆,所述第二安装杆的顶部活动安装有固定板,所述第二安装杆的外表面活动套设有第二移动杆,所述第二移动杆的内部固定贯穿有第三安装杆,所述第三安装杆的外表面活动安装有固定块,所述固定块的外表面固定套设有转向块,所述转向块的底部固定安装有支撑杆,所述支撑杆的外表面活动安装有轮子,所述蜗轮的外表面啮合有蜗杆,所述蜗杆远离蜗轮的一侧焊接有电机轴杆,所述电机轴杆远离蜗杆的一侧固定安装有电机。
6.作为一种优选的实施方式,所述传动杆的底部与第一移动杆的顶部相贴合,所述第一移动杆的顶部与第二移动杆的底部相贴合。
7.作为一种优选的实施方式,所述第二移动杆的顶部与连接杆的外表面相贴合。
8.作为一种优选的实施方式,所述第二移动杆的顶部与固定块的底部相适配,所述固定块的顶部与转向块的底部相贴合。
9.作为一种优选的实施方式,所述第三安装杆的顶部螺纹连接有固定螺母,所述固定螺母的底部与转向块的顶部相适配。
10.作为一种优选的实施方式,所述电机的底部固定安装有电机支架,所述电机支架远离电机的一侧与固定板的外表面相焊接。
11.与现有技术相比,本实用新型的优点和积极效果在于,
12.1、本实用新型中,通过电机可以将蜗轮转动,当电机工作的时候,可以将电机轴杆旋转,当电机轴杆旋转的时候,可以将连接在电机轴杆上的蜗杆转动,当蜗杆转动的时候可以将蜗轮,当蜗轮旋转的时候,可以将旋转杆旋转,当旋转杆旋转的时候,可以将传动杆移动,当传动杆移动的时候,可以将安装在底部的第一安装杆移动,当第一安装杆移动的时候,可以将第一移动杆移动,当第一移动杆移动的时候,可以将第二安装杆移动,当第二安装杆移动的时候,可以使得连接杆左右移动。
13.2、本实用新型中,通过连接杆左右移动,可以使得第二移动杆移动,当第二移动杆移动的时候,可以使得第三安装杆在固定块的内部转动,当第三安装杆转动的时候,可以将固定在第三安装杆外表面的转向块移动,转向块的移动的时候,可以将安装底部支撑杆移动,当支撑杆移动的时候,可以将轮子的方向移动,从而调节车辆的行驶方。
附图说明
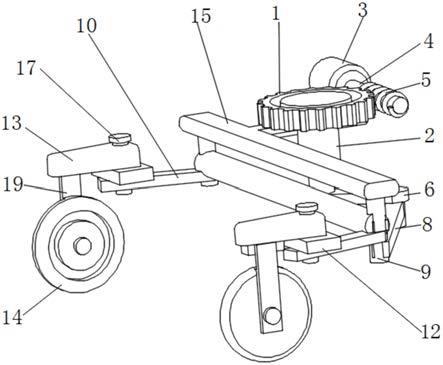
14.图1为本实用新型提出一种自动驾驶巡游车转向控制机构的立体图;
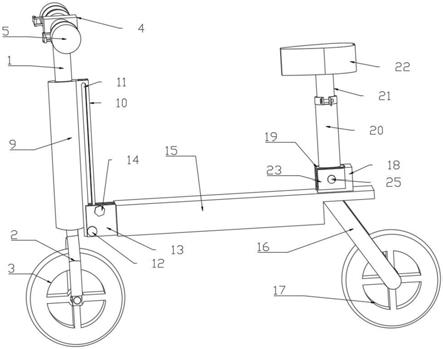
15.图2为本实用新型提出一种自动驾驶巡游车转向控制机构的侧视立体图;
16.图3为本实用新型提出一种自动驾驶巡游车转向控制机构的仰视立体图。
17.图例说明:
18.1、蜗轮;2、旋转杆;3、电机;4、电机轴杆;5、蜗杆;6、传动杆;7、第一安装杆;8、第一移动杆;9、第二安装杆;10、第二移动杆;11、第三安装杆;12、固定块;13、转向块;14、轮子;15、固定板;16、电机支架; 17、固定螺母;18、连接杆;19、支撑杆。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.请参阅图1
‑
3,本实用新型提供一种技术方案:一种自动驾驶巡游车转向控制机构,包括蜗轮1,蜗轮1的底部固定安装有旋转杆2,旋转杆2的底部互动安装有传动杆6,传动杆6远离旋转杆2的一侧活动安装有第一安装杆7,第一安装杆7的外表面活动套设有第一移动杆8,第一移动杆8远离第一安装杆7的一侧活动套设有第二安装杆9,第二安装杆9的顶部活动安装有固定板 15,第二安装杆9的外表面活动套设有第二移动杆10,第二移动杆10的内部固定贯穿有第三安装杆11,第三安装杆11的外表面活动安装有固定块12,固定块12的外表面固定套设有转向块13,转向块13的底部固定安装有支撑杆19,支撑杆19的外表面活动安装有轮子14,蜗轮1的外表面啮合有蜗杆5,蜗杆5远离蜗轮1的一侧焊接有电机轴杆4,电机轴杆4远离蜗杆5的一侧固定安装有电机3。
21.传动杆6的底部与第一移动杆8的顶部相贴合,第一移动杆8的顶部与第二移动杆10的底部相贴合,传动杆6的底部和第一移动杆8的顶部相贴合,通过第一安装杆7连接在一起,第一移动杆8的顶部和第二移动杆10的底部相贴合,可以通过第二安装杆9连接。
22.第二移动杆10的顶部与连接杆18的外表面相贴合,第二移动杆10和连接杆18通过
第二安装杆9连接。
23.第二移动杆10的顶部与固定块12的底部相适配,固定块12的顶部与转向块13的底部相贴合,固定块12的内部给第三安装杆11通过活动空间。
24.第三安装杆11的顶部螺纹连接有固定螺母17,固定螺母17的底部与转向块13的顶部相适配,固定螺母17可以将第三安装杆11的顶部固定。
25.电机3的底部固定安装有电机支架16,电机支架16远离电机3的一侧与固定板15的外表面相焊接,电机支架16可以将电机3固定,使得电机3在工作时,可以保持平稳运作。
26.本实施例的工作原理:在使用该装置工作的时候,首先根据图1
‑
3所示,该装置工作时,首先将电机3打开,当电机3工作的时候,可以将电机轴杆4 旋转,当电机轴杆4旋转的时候,可以将连接在电机轴杆4上的蜗杆5转动,当蜗杆5转动的时候可以将蜗轮1,当蜗轮1旋转的时候,可以将旋转杆2旋转,当旋转杆2旋转的时候,可以将传动杆6移动,当传动杆6移动的时候,可以将安装在底部的第一安装杆7移动,当第一安装杆7移动的时候,可以将第一移动杆8移动,当第一移动杆8移动的时候,可以将第二安装杆9移动,当第二安装杆9移动的时候,可以使得连接杆18左右移动。
27.同时根据图1和图3所示,当连接杆18左右移动的时候,可以使得第二移动杆10移动,当第二移动杆10移动的时候,可以使得第三安装杆11在固定块12的内部转动,当第三安装杆11转动的时候,可以将固定在第三安装杆11外表面的转向块13移动,转向块13的移动的时候,可以将安装底部支撑杆19移动,当支撑杆19移动的时候,可以将轮子14的方向移动,从而调节车辆的行驶方向。
28.以上所述,仅是本实用新型的较佳实施例而已,并非是对本实用新型作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例应用于其它领域,但是凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本实用新型技术方案的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。