1.本公开涉及一种信息处理装置、信息处理方法及程序。
背景技术:
2.近年来,使用头戴式显示器提供虚拟空间的技术迅速普及。据指出,在这样的技术中,用户的体验是否获得宛如现实那样的“沉浸感”,是在提供感动和满足感方面极其重要的要素。
3.在日本特开2004
‑
150900号公报中公开了一种如下的技术:当将姿态角检测装置安装在人体的对象部位以测量对象部位的姿态角时,姿态角检测装置相对于对象部位的安装角度预先作为初始姿态角进行保存,并且当检测人体的姿态角时,使用姿态角检测装置的角速度和角加速度、以及初始姿态角进行运算处理,从而校正姿态角检测装置相对于对象部位的安装角度误差,以高精度检测与对象部位相关的姿态角。
4.根据这样的技术,由于在头部佩戴头戴式显示器的使用者的实际的动作、与头戴式显示器的输出姿态角一致,因此在头戴式显示器所显示的图像与使用者的感觉之间不会产生不协调感,使用者能够以自然的感觉欣赏头戴式显示器的图像。
技术实现要素:
5.发明要解决的课题
6.然而,已知有通过显示手或脚等身体的一部分来提高沉浸感的情况,今后,设想如下的方向:在虚拟空间中更积极地显示第一人称视角的主人公角色的身体的一部分。
7.这样,在显示第一人称视角的主人公角色的身体的一部分的情况下,若在画面内表现的主人公的身体的一部分的位置、与现实的用户的身体的对应部分的位置有较大差异,则显著妨碍沉浸感。
8.但是,在日本特开2004
‑
150900号公报中,无法解决这样的问题点。
9.因此,本公开的目的在于,提供一种能够抑制主人公角色的身体的一部分的显示位置、与对应的用户的身体的一部分的位置之间的偏离的信息处理装置、信息处理方法及程序。
10.解决课题的手段
11.为了解决上述课题,本公开为一种信息处理装置,其在佩戴于用户的头部的显示器上呈现虚拟空间,其特征在于,所述信息处理装置具有:第一输入单元,其输入来自检测所述用户的头部的动作的传感器的检测信息;生成单元,其根据由所述第一输入单元输入的检测信息,生成将示出所述用户的身体的至少一部分的身体图像包括在内的所述虚拟空间;第二输入单元,其输入来自进行对所述用户的头部的俯仰方向的角度进行修正的操作的设备的修正信息;修正单元,其基于由所述第二输入单元输入的所述修正信息,修正在所述显示器上呈现所述虚拟空间时的俯仰方向的角度;以及呈现单元,其在所述显示器上呈现由所述修正单元修正了俯仰方向的角度的所述虚拟空间。
12.根据这样的结构,能够抑制主人公角色的身体的一部分的显示位置、与对应的用户的身体的一部分的位置之间的偏离。
13.此外,本公开的特征在于,所述信息处理装置具有存储单元,所述存储单元存储从所述第二输入单元输入的所述修正信息,所述修正单元基于存储于所述存储单元的所述修正信息,修正所述虚拟空间的俯仰方向的角度。
14.根据这样的结构,能够基于所存储的修正信息适当地继续进行俯仰方向的角度的修正。
15.另外,本公开的特征在于,所述修正单元在新指定俯仰方向的修正角度的情况下,将存储在所述存储单元中的所述修正信息的上次值作为初始值,指定所述虚拟空间的俯仰方向的角度的修正值。
16.根据这样的结构,能够容易地进行再修正。
17.并且,本公开的特征在于,所述设备具有操作部,所述操作部能够进行与对应于所述用户的前后方向或上下方向的方向有关的操作,所述修正单元通过参照与对应于所述操作部的所述前后方向或上下方向的方向有关的操作量,修正在所述显示器上呈现所述虚拟空间时的俯仰方向的角度。
18.根据这样的结构,通过前后方向或上下方向的操作,能够在感觉上容易理解并进行调整。
19.此外,本公开的特征在于,所述设备能够指定所述虚拟空间内的至少一个点,所述修正单元参照由所述设备指定的位置,对在所述显示器上呈现所述虚拟空间时的俯仰方向的角度进行修正。
20.根据这样的结构,能够使用定点设备(pointing device)容易地调整俯仰方向的角度。
21.另外,本公开的特征在于,所述信息处理装置具有获得单元,所述获得单元获得所述虚拟空间中的所述身体图像的俯仰方向的角度,所述修正单元参照由所述获得单元获得的俯仰方向的角度,从而对在所述显示器上呈现所述虚拟空间时的俯仰方向的角度进行修正。
22.根据这样的结构,能够自动地设定俯仰方向的角度。
23.并且,本公开的特征在于,所述修正单元基于从所述第二输入单元输入的所述修正信息,将示出俯仰方向的角度的修正量的量规(gauge)显示在所述虚拟空间的一部分中。
24.根据这样的结构,通过参照量规,能够正确地把握修正量。
25.此外,本公开为一种信息处理方法,其在佩戴于用户的头部的显示器上呈现虚拟空间,其特征在于,所述信息处理方法具有:第一输入步骤,在所述第一输入步骤中,输入来自检测所述用户的头部的动作的传感器的检测信息;生成步骤,在所述生成步骤中,根据在所述第一输入步骤中输入的检测信息,生成将示出所述用户的身体的至少一部分的身体图像包括在内的所述虚拟空间;第二输入步骤,在所述第二输入步骤中,输入来自进行对所述用户的头部的俯仰方向的角度进行修正的操作的设备的修正信息;修正步骤,在所述修正步骤中,基于在所述第二输入步骤中输入的所述修正信息,修正在所述显示器上呈现所述虚拟空间时的俯仰方向的角度;以及呈现步骤,在所述呈现步骤中,在所述显示器上呈现在所述修正步骤中修正了俯仰方向的角度的所述虚拟空间。
26.根据这样的方法,能够抑制主人公角色的身体的一部分的显示位置、与对应的用户的身体的一部分的位置之间的偏离。
27.另外,本公开为一种程序,其为计算机可读程序并使得所述计算机发挥在佩戴于用户的头部的显示器上呈现虚拟空间的信息处理的功能,其特征在于,所述程序使所述计算机用作:第一输入单元,其输入来自检测所述用户的头部的动作的传感器的检测信息;生成单元,其根据由所述第一输入单元输入的检测信息,生成将示出所述用户的身体的至少一部分的身体图像包括在内的所述虚拟空间;第二输入单元,其输入来自进行对所述用户的头部的俯仰方向的角度进行修正的操作的设备的修正信息;修正单元,其基于由所述第二输入单元输入的所述修正信息,修正在所述显示器上呈现所述虚拟空间时的俯仰方向的角度;以及呈现单元,其在所述显示器上呈现由所述修正单元修正了俯仰方向的角度的所述虚拟空间。
28.根据这样的程序,能够抑制主人公角色的身体的一部分的显示位置、与对应的用户的身体的一部分的位置之间的偏离。
29.此外,本公开为一种信息处理装置,其在佩戴于用户的头部的显示器上呈现虚拟空间,其特征在于,所述信息处理装置具有:第一输入单元,其输入来自检测所述用户的头部的动作的传感器的检测信息;生成单元,其根据由所述第一输入单元输入的检测信息,生成将示出所述用户的身体的至少一部分的身体图像包括在内的所述虚拟空间;呈现单元,其在所述显示器上呈现将所述身体图像包括在内的所述虚拟空间;第二输入单元,其通过所述呈现单元在所述显示器上呈现将所述身体图像包括在内的所述虚拟空间时,输入来自进行对所述用户的头部的俯仰方向的角度进行修正的操作的设备的修正信息;以及修正单元,其基于由所述第二输入单元输入的所述修正信息,对将所述身体图像包括在内的所述虚拟空间的俯仰方向的角度进行修正,以抑制在所述显示器上呈现所述虚拟空间时的、所述身体图像的显示位置与所述用户的身体的一部分的位置之间的偏离,其中,所述呈现单元,在所述显示器上呈现将由所述修正单元修正了俯仰方向的角度的所述身体图像包括在内的所述虚拟空间。
30.此外,本公开为一种信息处理方法,其在佩戴于用户的头部的显示器上呈现虚拟空间,其特征在于,所述信息处理方法具有:第一输入步骤,在所述第一输入步骤中,输入来自检测所述用户的头部的动作的传感器的检测信息;生成步骤,在所述生成步骤中,根据在所述第一输入步骤中输入的检测信息,生成将示出所述用户的身体的至少一部分的身体图像包括在内的所述虚拟空间;呈现步骤,在所述呈现步骤中,在所述显示器上呈现将所述身体图像包括在内的所述虚拟空间;第二输入步骤,在所述第二输入步骤中,在所述显示器上呈现将所述身体图像包括在内的所述虚拟空间时,输入来自进行对所述用户的头部的俯仰方向的角度进行修正的操作的设备的修正信息;以及修正步骤,在所述修正步骤中,基于在所述第二输入步骤中输入的所述修正信息,对将所述身体图像包括在内的所述虚拟空间的俯仰方向的角度进行修正,以抑制在所述显示器上呈现所述虚拟空间时的、所述身体图像的显示位置与所述用户的身体的一部分的位置之间的偏离,其中,在所述呈现步骤中,在所述显示器上呈现将在所述修正步骤中修正了俯仰方向的角度的所述身体图像包括在内的所述虚拟空间。
31.另外,本公开为一种程序,其为计算机可读程序并使得所述计算机发挥在佩戴于
用户的头部的显示器上呈现虚拟空间的信息处理的功能,其特征在于,所述程序用于使所述计算机用作:第一输入单元,其输入来自检测所述用户的头部的动作的传感器的检测信息;生成单元,其根据由所述第一输入单元输入的检测信息,生成将示出所述用户的身体的至少一部分的身体图像包括在内的所述虚拟空间;呈现单元,其在所述显示器上呈现将所述身体图像包括在内的所述虚拟空间;第二输入单元,其通过所述呈现单元在所述显示器上呈现将所述身体图像包括在内的所述虚拟空间时,输入来自进行对所述用户的头部的俯仰方向的角度进行修正的操作的设备的修正信息;以及修正单元,其基于由所述第二输入单元输入的所述修正信息,对将所述身体图像包括在内的所述虚拟空间的俯仰方向的角度进行修正,以抑制在所述显示器上呈现所述虚拟空间时的、所述身体图像的显示位置与所述用户的身体的一部分的位置之间的偏离,其中,所述呈现单元,在所述显示器上呈现将由所述修正单元修正了俯仰方向的角度的所述身体图像包括在内的所述虚拟空间。
32.此外,本公开为一种信息处理装置,其在佩戴于用户的头部的显示器上呈现虚拟空间,其特征在于,所述信息处理装置具有:输入单元,其输入来自检测所述用户的头部的动作的传感器的检测信息;生成单元,其根据由所述输入单元输入的检测信息,生成将示出所述用户的身体的至少一部分的身体图像包括在内的所述虚拟空间;呈现单元,其在所述显示器上呈现将所述身体图像包括在内的所述虚拟空间;以及修正单元,其通过所述呈现单元在所述显示器上呈现将所述身体图像包括在内的所述虚拟空间时,获取对所述用户的头部的俯仰方向的角度进行修正的修正信息,并基于所述修正信息,对将所述身体图像包括在内的所述虚拟空间的俯仰方向的角度进行修正,以抑制在所述显示器上呈现所述虚拟空间时的、所述身体图像的显示位置与所述用户的身体的一部分的位置之间的偏离,其中,所述呈现单元,在所述显示器上呈现将由所述修正单元修正了俯仰方向的角度的所述身体图像包括在内的所述虚拟空间。
33.此外,本公开为一种信息处理方法,其在佩戴于用户的头部的显示器上呈现虚拟空间,其特征在于,所述信息处理方法具有:输入步骤,在所述输入步骤中,输入来自检测所述用户的头部的动作的传感器的检测信息;生成步骤,在所述生成步骤中,根据在所述输入步骤中输入的检测信息,生成将示出所述用户的身体的至少一部分的身体图像包括在内的所述虚拟空间;呈现步骤,在所述呈现步骤中,在所述显示器上呈现将所述身体图像包括在内的所述虚拟空间;以及修正步骤,在所述修正步骤中,在所述显示器上呈现将所述身体图像包括在内的所述虚拟空间时,获取对所述用户的头部的俯仰方向的角度进行修正的修正信息,并基于所述修正信息,对将所述身体图像包括在内的所述虚拟空间的俯仰方向的角度进行修正,以抑制在所述显示器上呈现所述虚拟空间时的、所述身体图像的显示位置与所述用户的身体的一部分的位置之间的偏离,其中,在所述呈现步骤中,在所述显示器上呈现将在所述修正步骤中修正了俯仰方向的角度的所述身体图像包括在内的所述虚拟空间。
34.另外,本公开为一种程序,其为计算机可读程序并使得所述计算机发挥在佩戴于用户的头部的显示器上呈现虚拟空间的信息处理的功能,其特征在于,所述程序用于使所述计算机用作:输入单元,其输入来自检测所述用户的头部的动作的传感器的检测信息;生成单元,其根据由所述输入单元输入的检测信息,生成将示出所述用户的身体的至少一部分的身体图像包括在内的所述虚拟空间;呈现单元,其在所述显示器上呈现将所述身体图像包括在内的所述虚拟空间;以及修正单元,其通过所述呈现单元在所述显示器上呈现将
所述身体图像包括在内的所述虚拟空间时,获取对所述用户的头部的俯仰方向的角度进行修正的修正信息,并基于所述修正信息,对将所述身体图像包括在内的所述虚拟空间的俯仰方向的角度进行修正,以抑制在所述显示器上呈现所述虚拟空间时的、所述身体图像的显示位置与所述用户的身体的一部分的位置之间的偏离,其中,所述呈现单元,在所述显示器上呈现将由所述修正单元修正了俯仰方向的角度的所述身体图像包括在内的所述虚拟空间。
35.发明效果
36.根据本公开,能够提供一种能够抑制主人公角色的身体的一部分的显示位置、与对应的用户的身体的一部分的位置之间的偏离的信息处理装置、信息处理方法及程序。
附图说明
37.图1是包括本公开的实施方式所涉及的信息处理装置的系统的结构例。
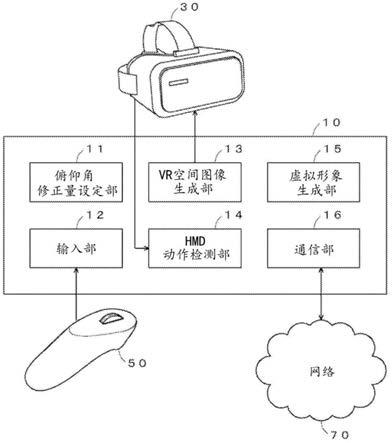
38.图2是图1所示的信息处理装置的结构例的示意图。
39.图3是图1所示的hmd的结构例的示意图。
40.图4是图3所示的hmd所具有的三个轴向的示意图。
41.图5是图1所示的操作设备的外观立体图。
42.图6是图1所示的操作设备的电结构例的示意图。
43.图7是制作者等意图的vr空间图像的位置关系的示意图。
44.图8是实际的vr空间图像的位置关系的示意图。
45.图9是俯仰角修正后的vr空间图像的位置关系的示意图。
46.图10是制作者等意图的vr空间图像的位置关系的示意图。
47.图11是实际的vr空间图像的位置关系的示意图。
48.图12是俯仰角修正后的vr空间图像的位置关系的示意图。
49.图13是用于说明在图2所示的实施方式中执行的处理的一个示例的流程图。
50.图14是图5所示的操作设备的另一结构例的示意图。
51.图15是图5所示的操作设备的又一结构例的示意图。
52.图16是使用定点设备调整俯仰角的情况下的显示画面的一个示例的示意图。
53.图17是用于说明在图2所示的实施方式中执行的另一个处理的一个示例的流程图。
54.图18是用于说明在图2所示的实施方式中执行的又一个处理的一个示例的流程图。
具体实施方式
55.下面,将对本公开的实施方式进行说明。
56.(a)本公开的实施方式的结构的说明
57.图1是包括本公开的实施方式所涉及的信息处理装置的信息处理系统的结构例的示意图。如图1所示,本公开的实施方式所涉及的信息处理装置系统,包括信息处理装置10、头戴式显示器(head mount display,hmd)30、操作设备50以及网络70。
58.其中,信息处理装置10如后述所示,由个人计算机等构成,并且例如基于从连接到
网络70的服务器(未图示)供给的程序或数据,生成虚拟现实(virtual reality,vr)空间图像并供给到hmd 30,并且根据佩戴hmd 30的用户的头部的动作来更新vr空间图像。此外,在用户操作操作设备50的情况下,信息处理装置10获取操作量,并执行与操作量相应的处理(后面描述)。vr空间图像是虚拟空间的一个示例。
59.hmd 30由用户佩戴在头部,在内置的显示器上显示从信息处理装置10供给的vr空间图像,并且检测用户的头部的动作,并将其提供给信息处理装置10。
60.操作设备50由用户操作,生成并输出与操作量相应的信息。
61.网络70例如由互联网等构成,在未图示的服务器与信息处理装置10之间将信息作为网际互连协议包(ip包)传送。
62.图2是示出了信息处理装置10的电结构例的框图。如图2所示,信息处理装置10具有俯仰角修正量设定部11、输入部12、vr空间图像生成部13、hmd动作检测部14、虚拟形象生成部15、以及通信部16。
63.其中,俯仰角修正量设定部11,基于从操作设备50输入的信息来设定对vr空间图像的俯仰角进行修正的量。
64.在操作操作设备50的情况下,输入部12从操作设备50输入示出操作量的信息。
65.vr空间图像生成部13生成在用户周围构建的vr空间图像,并将该vr空间图像供给到hmd 30。
66.hmd动作检测部14输入从hmd 30所具有的加速度传感器(后面描述)输出的、与hmd 30的动作有关的信息,并检测hmd 30的动作,从而检测用户的头部的动作。
67.虚拟形象生成部15生成虚拟形象的身体的至少一部分的图像作为第一人称视角的主人公角色的虚拟形象。虚拟形象的身体的至少一部分的图像是身体图像的一个示例。
68.通信部16经由网络70,访问未图示的服务器,获得服务器中存储的信息,或者对服务器发送信息。
69.图3是示出了hmd 30的电结构例的框图。如图3所示,hmd 30包括处理器31、存储器32、一组显示器33、多个加速度传感器34、多个发光二极管(light emitting diode,led)35、通信部36、扬声器37和麦克风(下文中简称为“麦克”)38。
70.另外,hmd 30佩戴在用户的头部上使用。hmd 30具有用于对用户的左眼和右眼显示从信息处理装置10供给的vr空间图像的左右一组显示器33,并且具有位于显示器33与用户的眼睛之间、以用于扩大视角的左右一对光学透镜;以及用于检测用户的头部的动作的加速度传感器34。
71.其中,处理器31基于存储在存储器32中的程序和数据,控制装置的各部。
72.存储器32例如由随机存取存储器(random access memory,ram)以及只读存储器(read only memory,rom)等构成,存储由处理器31执行的程序和数据。
73.显示器33对用户的左眼和右眼呈现从信息处理装置10供给的vr空间图像。
74.加速度传感器34例如由陀螺仪传感器构成。如图4所示,加速度传感器34,将用户的头部的动作作为使头左右倾斜的方向即侧倾方向的角度的侧倾角θr、使脸左右摇晃的方向即横摆方向的角度的横摆角θy、以及使颌的上下方向即俯仰方向的角度的俯仰角θp的各自的加速度进行检测并输出。
75.返回图3。led 35例如构成发光标记,并且相对于信息处理装置10,被配置成能够
检测hmd 30的位置而构成。
76.通信部36通过无线或有线与信息处理装置10连接,从信息处理装置10接收vr空间图像,并且将示出由加速度传感器34检测到的hmd 30的三个轴向上的加速度的信息发送到信息处理装置10。
77.扬声器37将从信息处理装置10经由通信部36供给的声音信息转换为声音并进行放音。另外,也可以使用耳机代替扬声器37。
78.麦克38将用户发出的声音转换为电信号并输出。
79.图5是示出了操作设备50的结构例的外观立体图。如图5所示,操作设备50例如具有由树脂构成的主体部501,用户把持该主体部501来使用。并且,在主体部501的端部形成有配置操作部503的平面部502。能够通过用户旋转操作部503,如后述所示地调整呈现vr空间图像时的俯仰角。
80.图6是操作设备50的电结构例的示意图。如图6所示,操作设备50包括处理器51、存储器52、操作量检测部53、传感器组54、通信部55和振动部56。
81.其中,处理器51基于存储在存储器52中的程序和数据,控制装置的各部。
82.存储器52由ram和rom等构成,存储由处理器51执行的程序和数据。
83.操作量检测部53例如检测并输出图5所示的操作部503的操作量。更具体地,在图5的示例中,操作部503具有刻度盘型的结构,并且操作量检测器53包括检测刻度盘型的操作部503的旋转角度的旋转编码器,生成并输出示出了用户的操作量的信息。
84.传感器组54例如包括倾斜传感器等,检测并输出操作设备50的角度。
85.通信部55通过无线或有线与信息处理装置10连接,例如,从信息处理装置10接收用于控制振动部56的信息,并且将由操作量检测部53和传感器组54检测出的信息发送到信息处理装置10。
86.振动部56例如包括振动马达,并且在处理器51的控制下产生振动以使操作设备50的主体部501振动。
87.(b)本公开的实施方式的动作的说明
88.接着,将对本公开的实施方式的动作进行说明。在下文中,对本公开的实施方式的动作概要进行说明后,将参照流程图对动作的详细内容进行说明。
89.图7~图12是用于说明本公开的动作的概要的图。图7是将海中的环境作为vr空间图像来呈现的情况,并且由vr空间图像的制作者或拍摄者(在下文中,称为“制作者等”)假设的状况的示意图。在图7的示例中,将海中的环境(为了简化附图,省略详细内容)作为vr空间图像呈现给用户90。此外,在图7的示例中,作为用户90的虚拟形象(化身)的身体的一部分的脚蹼100,呈现在与用户90的脚一致的位置处。并且,在图7的示例中,鲨鱼110对脚蹼100进行攻击。即,制作者等假设用户90例如以坐姿观看,并且假设用户90的脚存在于相对于虚拟相机的正面方向约45度下方,从而制作或拍摄vr空间图像(在下文中,称为“制作等”)。
90.图8示出了用户90实际观看时的状况。在图8的示例中,用户90不是坐姿,而是例如以躺在沙发92等的仰卧姿势观看vr空间图像。在这种情况下,在呈现vr空间图像的现有信息处理装置中,由于没有考虑用户90是哪种姿势,因此如图8所示,在远离用户90的脚的位置处显示脚蹼100。在这种情况下,用户90很难将脚蹼片100识别为自己身体的一部分,因
此,即使鲨鱼110对这样的脚蹼100进行攻击,也很难感觉到对自己的攻击。
91.在vr空间内敌人、怪物、朋友等其他人想要施加接近或接触第一人称视角的主人公角色的身体等干扰的情况下,在vr空间图像中呈现的主人公的身体的一部分的位置与现实的用户90的位置不同的情况下,以往存在显著妨碍沉浸感的问题。
92.因此,在本公开的实施方式中,其特征在于,在vr空间图像的播放开始时或vr空间图像的播放中,通过用户90对操作设备50的操作部503进行操作,如图9所示,修正俯仰角θp,并且进行调整使得在由制作者等假设的位置处、呈现用户90的虚拟形象的身体的一部分、或想要对身体的一部分施加干扰的其他人等的图像。
93.图10~图12示出了其他内容的情况。图10示出了制作者等意图的vr空间图像与用户90之间的关系。即,在图10的示例中,示出了用户90为站姿,并且狗120存在于用户90的脚下。
94.图11示出了实际观看时的状况。在图11的示例中,用户90是上半身相对于铅直方向倾斜的状态的坐姿。在这种情况下,狗120不是以在用户90的脚下、而是以在空中漂浮的状态显示。在vr空间图像中在与其对应的位置处显示作为用户90的虚拟形象的一部分的手、并且该虚拟形象的手抚摸狗120的情况下,难以将该手识别为自己的手。
95.图12示出了根据本实施方式调整显示位置的情况下的显示示例。在本公开的实施方式中,在vr空间图像的播放开始时或vr空间图像的播放中,通过用户90对操作设备50的操作部503进行操作,如图12所示,可以调整俯仰角θp,并且进行修正使得在由制作者等假设的位置处呈现vr空间图像,因此能够在用户90的脚下显示狗120。在这种情况下,如果显示作为用户90的虚拟形象的一部分的手、并且通过虚拟形象的手抚摸狗120,能够将该手识别为自己的手。
96.这样,进行调整,使虚拟形象的身体的一部分与用户90的身体的一部分一致,从而提高对虚拟形象的身体所有感觉,由此可以提高沉浸感。
97.另外,关于身体所有感,已知有以下的论文。
98.例如,在论文1(botvinick m.和cohen j.:"rubber hands
‘
feel’touch that eyes see[眼睛看到的橡胶手“感”触]",nature[自然],391(6669):756,(1998))中记载有,若进行如下的事先训练:在向被测者呈现的视野中放置橡胶制的假手、并在触碰被测者处于隐藏在视野之外的场所的实际的手的同时、也触碰橡胶制的假手,则由于脑的错觉,仅通过触碰橡胶制的假手的视觉信息,也会产生自己被触碰的感觉(橡胶手错觉,rhi:rubber hand illusion)。另外,与此类似的一系列现象被称为身体感觉的转移、或身体所有感等,近年来被非常热心地研究着。
[0099]
此外,在论文2(slater m.,spanlang b.、sanchez
‑
vives m.v.和blanke o.:"first person experience of body transfer in virtual reality[虚拟现实中身体转移的第一人称体验]",plos one,5(5):e10564,(2010))中记载有,不仅第一人称视角而且第三人称视角也能得到身体所有感。
[0100]
此外,在论文3(kondo r.、sugimoto m.、minamizawa k.、hoshi t.、inami m.和kitazaki m.:"illusory body ownership of an invisible body interpolated between virtual hands and feet via visual
‑
motor synchronicity[通过视觉
‑
运动同步性在虚拟手和脚之间插入的无形身体的虚幻身体所有权]",scientific reports[科学
报告],8:7541,(2018))中示出以下事实:即使在只有手和脚尖与被测者的动作同步显示、并且应该将它们之间连接的人体宛如透明人那样、什么也不显示的情况下,在其透明的部分也能获得身体所有感。
[0101]
另一方面,在论文4(pavani f.:"visual capture of touch:out
‑
of
‑
the
‑
body experiences with rubber gloves[触摸的视觉捕捉:橡胶手套的体外体验]",psychological science[心理科学],11(5):353
‑
359,(2000))中叙述了,所放置的假手的角度与现实的手应能看到的角度之差越小,身体所有的感觉越强。即,给出了具有以下倾向的启示:作为人类认知上的自然性质,在虚拟空间内的主人公的身体的显示的、尽可能地靠近在现实空间内的用户的身体所处的位置的一方,更容易引起身体感觉的转移,因此,也更容易得到沉浸感。
[0102]
即,本实施方式在立足于人脑的认知机构自然具有的这些科学性质的基础上,也关注与虚拟现实相关的许多内容共享的各种性质,由此提供对于例如图8所示的状况的技术解决方案。
[0103]
此外,在本实施方式中,特征在于,根据用户90的头部的动作进行检测、特别关注用于视线的调整的三个角度(θr,θy,θp)中的俯仰角θp的这一点。即,作为第一人称视角的主人公角色的虚拟形象的姿势,有可能随着故事的推进而发生各种变化,但当人的眼睛在视野内捕捉到自己的身体时,使头倾斜(侧倾方向的动作)、或左右转头(横摆方向的动作)是相对稀少的现象。即使假设主人公不倾斜头、并对应该感兴趣的对象不向左右偏移、几乎朝向正面,在多数情况下也不会产生问题。
[0104]
映在视野内的自己的身体大多情况下位于视野的正面中心附近,在大多情况下能够期待存在于自己的肩宽内。此时,通过颌的上下(俯仰轴向上的动作),其外观发生很大变化。根据人的各种动作,例如站立、坐下、弯腰、躺下等动作,自己身体的视野内的形状发生变化,但这些变化主要能够通过俯仰角的调整来近似地进行配合。
[0105]
因此,在本公开中,除了对基于来自感知用户的头部的动作的传感器的侧倾角θr、横摆角θy、俯仰角θp的视线移动进行检测的hmd动作检测部14之外,特别是,关于管理视线的上下方向的变化的俯仰角,通过设置用于能够进行基于用户90的意图的强制移动(上仰、下俯)的俯仰角修正量设定部11,能够减少作为第一人称视角的主人公的虚拟形象的身体表现与用户现实姿势的不一致。
[0106]
由于人脑具有较大的调整能力,因此,期望即使仅调整四肢位置的大致重叠,也能够得到保持沉浸感的较大的心理效果。因此,在本实施方式中,通过操作设备50实施作为第一人称视角的主人公角色的虚拟形象的身体与现实的用户90的身体姿势的大致对位,用户90根据其自身的意图来操作操作设备50,从而能够提供沉浸感更高的虚拟空间。
[0107]
图13是用于说明在本公开的实施方式中执行的处理的一个示例的流程图。在下文中,将参照图13所示的流程图,对本公开的详细动作进行说明。当开始图13所示的流程图的处理时,执行以下步骤。
[0108]
在步骤s10中,信息处理装置10的hmd动作检测部14参照hmd 30的加速度传感器34的输出,以检测hmd 30的初始位置。即,作为hmd 30的三个轴向的初始位置,例如,检测初始侧倾角θr0、初始横摆角θy0、以及初始俯仰角θp0。例如,在θr0=0、θy0=0以及θp0=0的情况下,作为绘制基准的侧倾角θr、横摆角θy、以及俯仰角θp,分别被设定为θr=0、θy=0、以
及θp=0。另外,可以不参照加速度传感器34的输出,而是点亮设置在hmd 30的led 35,并且可以将它们作为标记物,通过图像识别来检测初始位置。
[0109]
在步骤s11中,俯仰角修正量设定部11代入“0”作为俯仰角修正量θpc的初始值。
[0110]
在步骤s12中,虚拟形象生成部15基于作为在步骤s10中检测出的初始位置的侧倾角θr、横摆角θy、以及俯仰角θp,执行生成用户90的虚拟形象图像的处理。例如,在图7的示例中,虚拟形象生成部15,生成佩戴在用户90的虚拟形象的身体的一部分上的脚蹼100的图像。
[0111]
在步骤s13中,vr空间图像生成部13基于作为在步骤s10中检测出的初始位置的侧倾角θr、横摆角θy、以及俯仰角θp,执行生成vr空间图像的处理。例如,在图7的示例中,生成示出了海中环境的图像,并且与在步骤s12中生成的虚拟形象图像重叠,从而生成vr空间图像。
[0112]
在步骤s14中,vr空间图像生成部13对hmd 30在步骤s13中生成的vr空间图像输出。其结果,在hmd 30中,例如,通信部36接收vr空间图像,并供给至处理器31。处理器31在显示器33上显示从通信部36供给的vr空间图像。
[0113]
在步骤s15中,hmd动作检测部14参照从hmd 30的加速度传感器34供给的信息,检测hmd 30的位置。更详细地,hmd动作检测部14,检测图5所示的侧倾轴向、横摆轴向、以及俯仰轴向的动作。
[0114]
在步骤s16中,俯仰角修正量设定部11参照从输入部12输入的信息,判断是否对操作设备50的操作部503进行了上仰或者下俯的操作,在判断为进行了操作的情况下(步骤s16:“是(y)”),进入到步骤s17,在除此以外的情况下(步骤s16:“否(n)”),进入到步骤s18。例如,在用户用拇指等旋转操作部503的情况下,确定为“是”,并进入到步骤s17。
[0115]
在步骤s17中,俯仰角修正量设定部11根据在步骤s16中检测出的针对操作设备50的操作部503的操作量,执行更新俯仰角修正量θpc的处理。例如,在图9的示例中,作为一个示例,由于输入与操作部503的操作量相应的
“‑
35度”,因此设定为俯仰角修正量θpc=
‑
35。关于从操作部503的操作量向俯仰角修正量θpc的变换,优选例如能够通过系统的选项画面等调整其灵敏度。
[0116]
在步骤s18中,vr空间图像生成部13根据在步骤s17中更新的俯仰角修正量来执行修正俯仰角的处理。例如,在上述图9的示例中,由于俯仰角修正量θpc=
‑
35,因此vr空间图像生成部13执行将俯仰角θp修正
‑
35度的处理(设为θp
←
θp θpc的处理)。
[0117]
在步骤s19中,虚拟形象生成部15基于在步骤s18中修正后的俯仰角,执行生成用户90的虚拟形象图像的处理。例如,在上述图9的示例中,虚拟形象生成部15,基于在步骤s18中修正后的俯仰角θp,生成佩戴在用户90的虚拟形象的身体的一部分上的脚蹼100的图像。
[0118]
在步骤s20中,vr空间图像生成部13执行生成vr空间图像的处理。例如,在上述图9的示例中,基于在步骤s18中修正后的俯仰角θp,生成示出海中环境的图像,并且生成鲨鱼110的图像。然后,将在步骤s12中生成的虚拟形象图像重叠在这些图像上,从而生成vr空间图像。
[0119]
在步骤s21中,vr空间图像生成部13对hmd 30输出在步骤s20中生成的vr空间图像。其结果,在hmd 30中,例如,通信部36接收vr空间图像,并供给至处理器31。处理器31在
显示器33上显示从通信部36供给的vr空间图像。其结果,如图9所示,作为虚拟形象图像的脚蹼100与鲨鱼110的位置被适当地调整后的vr空间图像显示在hmd 30的显示器33上。如上所述,已知人脑在vr空间内的主人公角色与自己之间引起身体感觉的转移,具有身体所有感。此时,在虚拟空间上提供的与主人公身体有关的视觉表现,具有越接近自身身体本来应该处于的位置越容易得到该感觉的性质。因此,通过修正俯仰角θp,例如在图9的示例中,能够增强对脚蹼100的身体所有感。由此,能够将鲨鱼110的攻击强烈地识别为对自身的攻击,因此能够提高对vr空间的沉浸感。
[0120]
在步骤s22中,vr空间图像生成部13判断是否结束处理,在判断为结束处理的情况下(步骤s22:“是”)结束处理,在除此之外的情况下(步骤s22:“否”),返回到步骤s15,并重复与上述情况相同的处理。
[0121]
根据以上的处理,例如,如图8所示,在作为虚拟形象图像的一部分的脚蹼100的位置与用户90的脚的位置不一致的情况下,通过对操作设备50的操作部503进行操作来修正俯仰角θp,如图9所示,通过使它们一致,能够提高对vr空间的沉浸感。
[0122]
具体地,信息处理装置10修正将虚拟形象包括在内的vr空间图像的俯仰方向的角度,以抑制主人公角色的身体的一部分的显示位置、与对应的用户90的身体的一部分的位置之间的偏离。然后,信息处理装置10在显示器上呈现俯仰方向的角度被修正后的vr空间图像。通过抑制主人公角色的身体的一部分的显示位置、与对应的用户90的身体的一部分的位置之间的偏离,用户90的沉浸感得以提高。因此,通过信息处理装置10的处理,起到了帮助用户90增强沉浸感的技术效果。更详细地,通过信息处理装置10的结构,用户90可以得到如上述文献1~文献5中公开的沉浸感。
[0123]
在现有的vr技术中,最重要的目的是根据用户佩戴在头部上的hmd的动作来修正vr空间图像。另外,作为实现vr空间内的自由度(degrees of freedom:dof)的机构,存在实现三个自由度(仅用户的头部的俯仰角、横摆角和侧倾角的变化被反映到vr空间图像的机构)、以及6个自由度(用户的头部的平行移动也被反映到vr空间图像的机构)的机构。
[0124]
在任何机构中,主要目的始终都是感测用户的“头部”的动作并将其反映在vr空间图像中,对于用户的头部以外的身体动作,在初始vr技术中没有处理。其理由是,在vr技术的发展历史的初期,假设如飞机的操纵或汽车的驾驶那样,用户会采取就坐于座位等的标准姿势来进行视听以及操作,这一点产生较大的影响。在这种情况下,vr内容制作者所假设的用户姿势与实际的用户的物理姿势之间的不一致较小。
[0125]
与此相对地,在今后的vr技术中,还需要应对用户处于卧床姿势的情况或用户处于放松姿势等所有姿势。
[0126]
此外,作为现有的vr技术,存在将用户的四肢等的运动反映到vr空间图像中的技术。例如,用户用单手或双手握住操作用设备,通过传感器组或外部摄像机等检测操作设备的位置或运动,能够将用户的四肢的状态反映到vr空间图像中。
[0127]
在这种情况下,例如,通过将操作用设备选择为网球的球拍那样的运动器具或格斗用的武器,并且设置根据由传感器等检测出的信息动态地生成用户的身体以及器具等的图像表现的机构,从而在vr空间图像中进行自然的显示。
[0128]
但是,在这种情况下,也以vr内容制作者所假设的用户的姿势与实际的用户的物理姿势大致一致为前提,始终以使用户的手臂等的位置反映在vr空间图像上为目的。
[0129]
在这种技术的延长线上,在想要使vr空间图像内的主人公角色即虚拟形象的姿势与用户的物理姿势一致的情况下,需要在用户的四肢或躯干等表现对象的所有身体位置准备传感器组等。此外,需要用于整合这些信息并动态地生成vr空间图像的复杂的机构。用于实现这样的机构的成本高,用于使用的佩戴或设置等的准备也变得繁杂。
[0130]
与此相对地,本公开的信息处理装置10可以给予用户深度沉浸感,而不需要上述复杂且昂贵的机构。
[0131]
此外,本公开的信息处理装置10的基本想法在于:显示在用户的视野内的作为主人公角色的虚拟形象的身体与实际的用户的物理身体之间的不一致,着眼于“俯仰角的偏差成为最主要的原因”的事实这一点。
[0132]
在用户处于头部朝向正面的状态的情况下,用户自己的双臂或双脚位于视野内的下方。因此,只要用户不采取特殊姿势,就能够通过修正俯仰角,来消除vr空间图像内的虚拟形象与实际的用户之间的姿势的大部分的不一致。由此,能够给用户带来沉浸感。
[0133]
另外,在本公开的信息处理装置10中,对于人脑还考虑了作为橡胶手错觉等而已知的灵活的认知功能。根据学术研究的成果明确了:如果在用户的视野内、接近自己的身体部分应存在的角度、并呈现作为其替代的假的图像表现,得到相对于该图像表现的强烈的身体所有感。因此,即使用户的四肢的位置等未被正确地播放,也能够通过调整俯仰角,在大致正确的位置呈现作为替代的图像表现,从而给与用户沉浸感。
[0134]
此外,本公开的信息处理装置10不使用在迄今为止的技术潮流的延长线上考虑的复杂的姿势判断机构或动态图像表现机构。本公开的信息处理装置10通过在最大限度地活用人脑所具有的灵活的认知机构的性质的同时采用简易的结构,能够给与用户充分的心理效果。由于该特性,根据本公开的信息处理装置10,可以廉价地制造和提供vr产品。
[0135]
此外,根据本公开的信息处理装置10,用户不需要佩戴特殊的器具或者设置外部照相机等,因此能够使用户的准备作业以及启动操作等显著地变得简洁。
[0136]
此外,本公开的信息处理装置10也能够应用于预先拍摄的实拍的影像等、不能进行身体表现的动态图像修正的对象。
[0137]
(c)变形实施方式的说明
[0138]
以上的实施方式为一个示例,本公开当然不限于上述情况。例如,在上述实施方式中,以使用图5所示的操作设备50的情况为例进行了说明,但例如也可以使用图14或图15所示的操作设备50a、操作设备50b。图14是具有杆型的操作部503a的操作设备50a的示例。即,在图14的示例中,通过使用用户90的拇指等对操作部503a进行操作,能够修正俯仰角。另外,在连续操作操作部503a的情况下,能够以与操作部503a的操作量(倾斜)相应的规定速度(例如,在最大限度操作的情况下为5度/秒)使俯仰角变化。
[0139]
图15是具有按钮型的操作部503b、操作部503c的操作设备50b的结构例。即,在图15的结构例中,在进行上仰的情况下,通过对操作部503b进行操作,在进行下俯的情况下,通过对操作部503c进行操作,能够调整为所希望的角度。另外,在连续对操作部503b、操作部503c进行操作的情况下,能够以规定速度(例如,5度/秒)使俯仰角变化。另外,在图5、图14、以及图15所示的操作设备中,以使前后方向与俯仰角对应的方式进行调整,但也可以使用户的上下方向与俯仰角对应的方式进行调整。
[0140]
此外,为了避免对vr空间的沉浸感的丧失,优选使用上述操作设备50、操作设备
50a和操作设备50b,但是如果出于简化系统的结构等目的而不使用操作设备,则也可以例如图16所示的操作画面可以作为替代单元显示在vr空间内,并且从该操作画面接受俯仰角修正量的输入。
[0141]
更详细地,可以使用附属于hmd 30或信息处理装置10的、用于操作或指定vr空间内的对象的定点设备,操作图16所示的操作画面。
[0142]
在图16的显示例中,通过用定点设备点击画面的左右端的固定宽度的带内(以下称为“量规显示区域”),俯仰角调整量规显示固定时间(例如10秒),并且通过点击该量规上的一个点,可以指定俯仰量(增减量)。优选设定为量规的上方为上仰,下方为下俯。由量规的多条直线表示的俯仰量,例如,可以考虑在正45度(上仰)至负45度(下俯)的范围内。
[0143]
在图16的情况下,与操作设备50的情况相同,优选可以在系统的选项画面上调整灵敏度(由量规表示的俯仰角修正量的大小)。在点击量规上的一点时,反映俯仰角调整之后,再次在相同时间(在上述示例中为10秒)继续量规的显示和点击的受理。由此,用户能够多次重复俯仰角调整,从而微调到适当的角度。
[0144]
俯仰角调整量规优选以非透射色绘制,以不受虚拟空间的明暗影响。此外,标准地,在左右两端设置量规显示区域,但优选通过选项设定,也能够根据用户的喜好选择仅设置在左右一侧。另外,即使在点击了俯仰角调整量规的范围外的一点的情况下,也能够作为有效的输入进行处理,从而进行俯仰角调整。由此,可以在虚拟空间内点击感兴趣的对象,调整俯仰角,以使其位于视线正面。
[0145]
图17是用于基于图16所示的显示画面、设定俯仰角修正量的流程图的一个示例。另外,在图17中,与图13所示的流程图对应的部分标注相同的附图标记,并且省略其描述。在图17中,与图13相比,步骤s16被除去,新追加了步骤s30~步骤s32。因此,以下,以步骤s30~步骤s32为中心进行说明。
[0146]
在步骤s30中,俯仰角修正量设定部11判断是否通过定点设备已指定vr空间的一点,在判断为已被指定的情况下(步骤s30:“是”),进入到步骤s31,在除此以外的情况下(步骤s30:“否”),进入到步骤s18。例如,在图16中,用定点设备点击画面的左右端的量规显示区域后,在点击了量规上的一点的情况下,判断为“是”并进入到步骤s31。
[0147]
在步骤s31中,俯仰角修正量设定部11特定已被点击的点。例如,在图16中,特定由定点设备点击的量规上的一点。
[0148]
在步骤s32中,俯仰角修正量设定部11,根据所指定的点来计算俯仰角修正量θpc。例如,在图16中,根据由定点设备点击的量规上的一点的位置来计算俯仰角修正量θpc。
[0149]
在步骤s17中,俯仰角修正量设定部11根据在步骤s32中计算出的俯仰角修正量θpc,更新已有的俯仰角修正量θpc。
[0150]
通过以上处理,能够使用图16所示的显示画面来更新俯仰角修正量。根据这种变形实施方式,可以使用已有的定点设备来设定俯仰角修正量,而不需要追加新的操作设备。
[0151]
此外,在上述实施方式中,俯仰角修正量是用户通过手动操作来输入的,但也可以基于制作者等的意图,在呈现的虚拟形象的姿势变化的情况下,自动地进行调整。具体地,也可以在生成vr空间图像的数据中,事先存储示出虚拟形象的姿势的信息,并基于示出虚拟形象的姿势的信息,自动地更新俯仰角修正量。
[0152]
图18是用于实现这种处理的流程图。另外,在图18中,与图13对应的部分标注相同
的附图标记,并且省略其描述。在图18中,与图13相比,追加步骤s50和步骤s51的处理。由于除此之外与图13相同,因此下面以步骤s50和步骤s51的处理为中心进行说明。另外,为了实现以下处理,作为前提,需要预先将与例如虚拟形象的姿势对应的俯仰角修正量嵌入生成vr空间图像的数据中。
[0153]
在步骤s50中,俯仰角修正量设定部11,从例如vr空间图像生成部13,获取对应于当前呈现的vr空间图像的场景的俯仰角修正量θpc。例如,根据在该场景中呈现的虚拟形象的姿势,获取预先嵌入在用于生成vr空间图像的数据中的俯仰角修正量θpc。在vr空间图像的场景发生变化、并且虚拟形象的姿势基于制作者等的意图而发生变化的情况下,俯仰角修正量θpc发生变化。因此,在俯仰角修正量θpc发生变化的情况下,例如从vr空间图像生成部13或虚拟形象生成部15获取新的俯仰角修正量θpc。
[0154]
在步骤s51中,俯仰角修正量设定部11根据在步骤s50中获取的俯仰角修正量θpc,更新已有的俯仰角修正量θpc。例如,在前一场景的俯仰角修正量是θpc1、并且新场景的俯仰角修正量是θpc2的情况下,重新设定俯仰角修正量θpc2。
[0155]
在步骤s16和步骤s17中,例如,根据上述操作设备50的操作来设定俯仰角修正量。此外,在步骤s17中,相对于在步骤s51中更新后的俯仰角修正量θpc,增减与操作设备50的操作相应的值,由此能够设定俯仰角修正量θpc。
[0156]
根据上述处理,由于能够在每次场景变化时自动地修正俯仰角,因此能够大致省略用户90通过手动操作来设定俯仰角修正量的工夫,用户90能够通过操作设备50的操作仅进行微修正即可。
[0157]
具体地,信息处理装置10在每次场景变化时自动修正俯仰角,并且在显示器上呈现俯仰角已被修正的vr空间图像。由于俯仰角修正量是预先设定的,因此俯仰角被自动修正。由此,省略用户90通过手动操作设定俯仰角修正量的工夫。因此,通过信息处理装置10的处理,起到了帮助用户90节省通过手动操作来设定俯仰角修正量的工夫的技术效果。
[0158]
另外,在以上所示的实施方式中,对以通过计算机图形绘制vr空间图像的情况为例进行了说明,但是本公开不限于计算机图形,例如可以使用通过能够拍摄全向影像的相机拍摄的实拍图像。即,本公开可以应用于基于图像的绘制或基于图像的建模。此外,在使用实拍图像的情况下,由于实拍图像中包含虚拟形象,因此在该情况下,可以从图2所示的结构中除去虚拟形象生成部15。当然,也可以不使用全向(360
°
)影像,而使用180
°
影像。
[0159]
此外,在图18所示的变形实施方式中,对生成vr空间图像的数据嵌入与场景相应的俯仰角修正量,但是例如,在所呈现的vr空间图像不是计算机图形、而是被拍摄的图像的情况下,可以将图像分析处理部追加到图3所示的结构中,而不是嵌入图像中所包括的主人公的图像的俯仰角修正量,并且可以通过图像分析处理部的分析处理,从图像中特定适当的俯仰角修正量,并设定特定后的俯仰角修正量。
[0160]
此外,在上述实施方式中,图13等所示的处理由信息处理装置10执行,但也可以将信息处理装置10的结构安装在hmd 30中,并由hmd 30执行图13等所示的处理。
[0161]
此外,在图1所示的结构例中,具有网络70和服务器,但也可以是不包含网络70的结构。此外,保存在服务器中的信息也可以保存在信息处理装置10或hmd 30中。
[0162]
另外,在上述实施方式中,虽然调整了俯仰角,但也可以根据需要调整横摆角和侧倾角。
[0163]
另外,在上述实施方式中由中央处理器(central processing unit,cpu)读取软件(程序)并执行的处理,也可以由cpu以外的各种处理器执行。作为该情况下的处理器,示例出在现场可编辑逻辑门阵列(field
‑
programmable gate array,fpga)等的制造后能够变更电路结构的可编辑逻辑器件(programmable logic device,pld)及专用集成电路(application specific integrated circuit,asic)等、具有为了执行特定的处理而专门设计的电路结构的处理器即专用电路等。另外,既可以通过这些各种处理器中的一个来执行各处理,也可以通过同种或异种的两个以上的处理器的组合(例如,多个fpga、以及cpu与fpga的组合等)来执行各处理。此外,这些各种处理器的硬件结构,更具体地,是组合了半导体元件等电路元件的电路。
[0164]
此外,在上述各实施方式中,说明了程序预先存储(安装)在存储器中的方式,但不限于此。程序可以以存储在紧凑型光盘只读储存器(compact disk read only memory,cd
‑
rom)、数字通用光盘只读储存器dvd
‑
rom(digital versatile disk read only memory)、以及通用串行总线(universal serial bus,usb)存储器等非暂时性(non
‑
transitory)存储介质中的方式提供。此外,程序也可以是经由网络从外部装置下载的方式。
[0165]
此外,也可以由具备通用运算处理装置及存储装置等的计算机或服务器等构成本实施方式的各处理,并通过程序执行各处理。该程序存储在存储装置中,并且可以记录在诸如磁盘、光盘或半导体存储器等记录介质中,或者可以通过网络提供。当然,任何其他构成元件都不需要由单个计算机或服务器来实现,而是可以通过分布到通过网络连接的多个计算机来实现。
[0166]
另外,本实施方式不限于上述各实施方式,在不偏离各实施方式的要旨的范围内可以进行各种变形和应用。
[0167]
2019年3月31日提交的日本专利申请2019
‑
069568号的公开内容全部通过引用并入本技术。该申请中记载的所有文献、专利申请和技术标准,与具体地和单独地描述通过引用而并入的单独的文献、专利申请和技术标准相同程度地,通过引用而并入本技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。