技术特征:
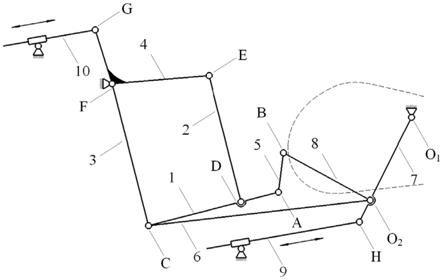
1.一种襟副翼运动机构设计方法,其特征在于,所述襟副翼运动机构包括襟副翼第一连杆(1)、襟副翼第二连杆(2)、襟副翼第三连杆(3)、襟副翼第四连杆(4)、小拉杆(5)、瓦特连杆(6)、摇臂(7)、襟副翼翼面(8)、第一作动器(9)和第二作动器10,其中,襟副翼第一连杆(1)与小拉杆(5)形成铰链运动点的初始位置a和结束位置a1,小拉杆(5)与襟副翼翼面(8)形成铰链运动点的初始位置b、结束位置b1,襟副翼第一连杆(1)、襟副翼第三连杆(3)与瓦特连杆(6)形成复合铰链运动点的初始位置c、结束位置c1,襟副翼第一连杆(1)与襟副翼第二连杆(2)形成铰链运动点的初始位置d、结束位置d1,襟副翼第二连杆(2)与襟副翼第四连杆(4)形成铰链运动点的初始位置e、结束位置e1,襟副翼第三连杆(3)、襟副翼第四连杆(4)与固定结构形成复合铰链固定点f,襟副翼第四连杆(4)与第二作动器(10)形成铰链运动点g,摇臂(7)与第一作动器(9)形成铰链运动点h,摇臂(7)与固定结构形成襟翼功能转轴的铰链固定点o1,摇臂(7)、瓦特连杆(6)与襟副翼翼面(8)形成副翼功能转轴的复合铰链运动点的初始位置o2、结束位置o
21
;所述设计方法包括:第一步,确定襟翼功能转轴o1确定副翼功能转轴的初始位置o2、结束位置o
21
,襟翼功能转轴o1位于o2o
21
的垂直平分线上,根据外形约束和载荷情况,确定襟翼功能转轴o1的位置;第二步:确定襟副翼第三连杆(3)和瓦特连杆(6)构建关于襟副翼第三连杆(3)和瓦特连杆(6)的第一运动矢量方程组,根据包括机翼后梁位置、外形、操纵系统尺寸及各种管路的约束条件确定f点位置,从而确定襟副翼第三连杆(3)和瓦特连杆(6);第三步:确定襟副翼第一连杆(1)和小拉杆(5)构建关于襟副翼第三连杆(3)、襟副翼第一连杆(1)和小拉杆(5)的运动矢量方程组;根据传动效率和结构安装空间等确定b点位置,根据定位变换确定b1点的位置,从而确定襟副翼第一连杆(1)和小拉杆(5);第四步:确定襟副翼第二连杆(2)和襟副翼第一连杆(1)靠近襟翼功能转轴o1部分构建关于襟副翼第二连杆(2)、襟副翼第一连杆(1)靠近襟翼功能转轴o1部分和小拉杆(5)的运动矢量方程组,从而确定襟副翼第二连杆(2)和襟副翼第一连杆(1)靠近襟翼功能转轴o1部分;第五步:确定第一作动器(9)和第二作动器(10)根据机翼外形、第二作动器(10)与襟副翼第四连杆(4)的传动角、机翼后梁的强度确定第二作动器(10)位置,根据襟副翼在各位置的上下偏转角度确定第二作动器(10)的行程,第二作动器(10)用于控制襟副翼的副翼功能;根据h点超出襟副翼外形的量、摇臂(7)与第一作动器(9)之间的传动角、结构安装空间确定第一作动器(9)的位置与行程,第一作动器(9)用于控制襟副翼的襟翼功能;第六步:设计迭代对襟副翼运动机构进行仿真,监控各运动构件之间的传动角及各交点载荷,当所述传动角小于预定值或结构安装空间不足时,按第一步~第五步进行迭代,对参数进行调整,迭代计算后得到最优解。2.如权利要求1所述的襟副翼运动机构设计方法,其特征在于,构建关于襟副翼第三连
杆(3)和瓦特连杆(6)的第一运动矢量方程组为:式中,w为襟副翼第三连杆(3)长度;z为瓦特连杆(6)长度;α为襟副翼第三连杆(3)初始位置角度;
△
α为襟副翼第三连杆(3)角度变化量;β为瓦特连杆(6)初始位置角度;
△
β为瓦特连杆(6)角度变化量;p为副翼转轴运动矢量的长度;γ为副翼转轴运动矢量的方向角。3.如权利要求2所述的襟副翼运动机构设计方法,其特征在于,根据包括机翼后梁位置、外形、操纵系统尺寸及各种管路的约束条件确定f点位置后,同时约束襟副翼第三连杆(3)长度、瓦特连杆(6)长度的变量范围,关于襟副翼第三连杆(3)和瓦特连杆(6)的第一运动矢量方程组演变为第二运动矢量方程组:式中,(x
f
,y
f
)为f点坐标值(x
o2
,y
o2
)为o2点坐标值;(x
o21
,y
o21
)为o
21
点坐标值;w
lower
为变量w的下限;w
upper
为变量w的上限,z
lower
为变量z的下限;z
upper
为变量z的上限。4.如权利要求3所述的襟副翼运动机构设计方法,其特征在于,在不限定变量范围或者仅限定w、α、
△
α、z、β、
△
β中任意一个或多个变量的范围下对第二运动矢量方程组求解,得到w、α、
△
α、z、β、
△
β、c点坐标(x
c
,y
c
)。5.如权利要求4所述的襟副翼运动机构设计方法,其特征在于,构建关于襟副翼第三连杆(3)、襟副翼第一连杆(1)和小拉杆(5)的第三运动矢量方程组为:
式中,v为襟副翼第一连杆(1)长度;为襟副翼第一连杆(1)初始位置角度;为襟副翼第一连杆(1)角度变化量;u为小拉杆(5)长度;θ为小拉杆(5)初始位置角度;
△
θ为小拉杆(5)角度变化量;q为b点运动矢量的长度;ε为b点运动矢量的方向角。6.如权利要求5所述的襟副翼运动机构设计方法,其特征在于,根据获得的襟副翼第三连杆(3)参数及w、α、
△
α、c点坐标(x
c
,y
c
)、c1点坐标(x
c1
,y
c1
),同时约束襟副翼第一连杆(1)长度v、小拉杆(5)长度u的变量范围,关于襟副翼第三连杆(3)、襟副翼第一连杆(1)和小拉杆(5)的第三运动矢量方程组演变为第四运动矢量方程组:式中,(x
c
,y
c
)为c点坐标值;(x
c1
,y
c1
)为c1点坐标值;(x
b
,y
b
)为b点坐标值;(x
b1
,y
b1
)为b1点坐标值;v
lower
—变量v的下限;v
upper
—变量v的上限;u
lower
为变量u的下限;u
upper
为变量u的上限。7.如权利要求6所述的襟副翼运动机构设计方法,其特征在于,在不限定变量范围或者仅限定v、u、θ、
△
θ中任意一个或多个变量的范围下对第四运动矢量方程组进行求解,得到v、u、θ、
△
θ、a点坐标(x
a
,y
a
)。8.权利要求7所述的襟副翼运动机构设计方法,其特征在于,构建关于襟副翼第二连杆
(2)、襟副翼第一连杆(1)靠近襟翼功能转轴o1部分和小拉杆(5)的第五运动矢量方程组为:式中,y为襟副翼第二连杆(2)长度;r—襟副翼第一连杆(1)右侧长度;η为襟副翼第二连杆(2)初始位置角度;
△
η为襟副翼第二连杆(2)角度变化量。9.如权利要求8所述的襟副翼运动机构设计方法,其特征在于,根据确定的u、θ、
△
θ、q、ε、(x
a
,y
a
)、(x
a1
,y
a1
),约束襟副翼第二连杆2长度y、襟副翼第一连杆1右侧长度r的变量范围,关于襟副翼第二连杆(2)、襟副翼第一连杆(1)靠近襟翼功能转轴o1部分和小拉杆(5)的第五运动矢量方程组演变为第六运动矢量方程组:式中,(x
a
,y
a
)为a点坐标值;(x
a1
,y
a1
)为a1点坐标值;y
lower
—变量y的下限;y
upper
—变量y的上限;r
lower
为变量r的下限;r
upper
为变量r的上限。10.如权利要求9所述的襟副翼运动机构设计方法,其特征在于,在不限定变量范围或者仅限定y、η、
△
η、r中任意一个或多个变量的范围下对第六运动矢量方程组进行求解,得到y、η、
△
η、r、d点坐标(x
d
,y
d
)、e点坐标(x
e
,y
e
)。
技术总结
本申请提供了一种襟副翼运动机构设计方法,所述襟副翼运动机构包括襟副翼第一连杆、襟副翼第二连杆、襟副翼第三连杆、襟副翼第四连杆、小拉杆、瓦特连杆、摇臂、襟副翼翼面、第一作动器和第二作动器,所述设计方法包括:第一步,确定襟翼功能转轴;第二步:确定襟副翼第三连杆和瓦特连杆;第三步:确定襟副翼第一连杆和小拉杆;第四步:确定襟副翼第二连杆和襟副翼第一连杆靠近襟翼功能转轴部分;第六步:设计迭代。本申请的襟副翼运动机构设计方法通过将一套复杂的襟副翼连杆机构拆分为几个部分,分步骤进行求解,设计难度大幅减小;求解过程综合考虑了结构安装空间、传动角等约束条件,迭代次数少,设计周期短,计算结果精确。计算结果精确。计算结果精确。
技术研发人员:冯变变 王少童 李云鹏 章祖华
受保护的技术使用者:中国航空工业集团公司西安飞机设计研究所
技术研发日:2021.09.24
技术公布日:2021/12/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。