1.本发明属于无人机技术领域,具体涉及一种可折叠式固定翼四旋翼复合无人机及其控制方法。
背景技术:
2.在航空领域常见的四旋翼无人机通过四个螺旋桨旋转产生推力,可以解决狭小场地垂直起降的问题,同时通过四个旋翼不同的转速可以改变飞行器的欧拉角,调整飞行器姿态。其具有姿态调节灵敏的优势,但飞行速度慢。
3.在航空领域常见的固定翼飞行器,利用泊努利原理在机翼上下表面产生的压力差提供升力起飞。利用各个翼面幅度改变飞行器姿态。其飞行速度快,航程和巡航时间长,但起降距离长,且需要高质量跑道。
4.在航空领域常见的固定翼飞行器其升力与速度正相关,当速度降低时升力也会下降,所以固定翼飞机无法在空中悬停。同时现有的常见的旋翼飞行器以及固定翼旋翼复合飞行器也没有在飞行中快速制动的功能。
5.在航空领域中常见的可折叠飞行器,固定翼型飞行器可通过折叠改变飞行器气动布局,旋翼形飞行器通过折叠可改变飞行器浆距、整体尺寸等。固定翼旋翼复合的飞行器,可在地面通过折叠改变姿态进行垂直起降,当飞行器具有一定速度时可将旋翼收回,但无法在空中悬停进行姿态复原。
6.现有专利cn211810214公开了“一种固定翼复合四旋翼飞行器”,该飞行器主要包括安装有控制中心的机身的飞行器本体。飞行器具有高航时、高航速性能。其特征在于:所述舵角转轴转动最大角度时,所述舵角转轴与通孔的端部接触。其通过舵机改变襟翼的角度,从而改变攻角的大小,能够使在多旋翼无人机灵活,可悬停及体积小的基础上拥有良好气动外形,在前飞时提高续航时间。不足在于无法在空中制动和在悬停状态下调整气动布局。
7.现有专利cn205150237公开了“一种基于四旋翼与固定翼复合的倾转旋翼飞行器”,该飞行器主要包括四个电机、机身、外部倾转传动轴、两侧后掠翼、翼梢、垂直尾翼、中段横向机翼、机身内部倾转传动轴、传动齿轮、副翼和水平尾翼。飞行器具有垂直起降、空中悬停与巡航平飞的性能并且简化倾转机械结构和提高飞行稳定性和飞行器载重量。此飞行器的特点是其通过将四旋翼与固定翼有机结合实现垂直起降、空中悬停与高速平飞的功能并且前后倾转电机组共用一套倾转控制装置,通过倾转传动轴实现倾转,简化倾转机械结构和倾转控制过程,提高倾转旋翼机的飞行稳定性和飞行器载重量。不足在于无法在空中制动和在悬停状态下调整气动布局。
8.现有专利cn204895853公开了“一种固定翼与可变形电动多旋翼组成的复合飞行器”,该飞行器主要包括机头、机身、尾翼、机翼。此飞行器具有垂直起降、飞行速度快、续航能力强的性能。其通过折弯装置、转动装置和滚筒装置的配合作用使得旋翼杆能折弯、翻转和旋转从而使得各个螺旋桨在总控制器的控制下能够任意改变方向和角度。不足在于无法
在空中制动和在悬停状态下调整气动布局。
9.现有专利cn106275416公开了“一种固定翼与多旋翼组成的复合飞行器”,该飞行器主要包括机身、机翼。此飞行器具有空中悬停、对跑道无依赖、零速度起飞着陆、飞行速度快、航程远的性能。特点在于结合了固定翼和多旋翼的结构包括对飞行器产生水平拉力或水平推力的第一推进装置以及多飞行器产生纵向升力和纵向推力的第二推进装置。不足在于无法在空中制动和在悬停状态下调整气动布局。
10.现有专利cn209176908公开了“一种复合驱动的旋翼固定翼无人机”,该无人机包括第一旋翼组件、第二旋翼组件、第三旋翼组件、第四旋翼组件、第一螺旋桨、第二螺旋桨、机身、飞控系统、电池、第一机翼、第二机翼、第三机翼、第四机翼、前起落架、后起落架、第一旋翼臂、第二旋翼臂、副翼、驱动电机、一尾翼、第二尾翼,该无人机具有全电动驱动垂直起降和前飞巡航的性能。特点是采用复合式倒v型尾翼,使无人机在飞行过程中有安全性与尾翼的可操控性。不足是不足在于无法在空中制动和在悬停状态下调整气动布局。
技术实现要素:
11.为了克服上述问题,本发明提供一种可折叠式固定翼四旋翼复合无人机及其控制方法, 通过折叠固定翼可在悬停状态实现四旋翼—固定翼四旋翼复合模式的转变,通过旋翼的转速改变可调整飞行器欧拉角,同时驱动涵道可以绕机臂轴转动,可在不影响飞行器飞行稳定性的前提下对飞行器进行制动。
12.为达到上述目的,本发明采用的技术方案为:
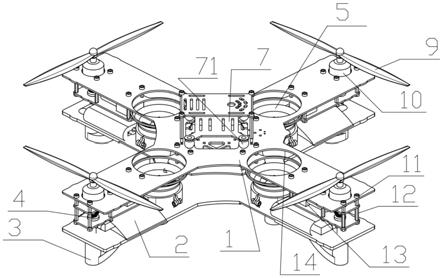
13.一种可折叠式固定翼四旋翼复合无人机,包括双层机臂1、机翼2、起落架3、固定翼4、飞控保护板7、螺旋桨9、电机10,其中双层机臂1包括结构相同且对齐设置的上层x形架体11和下层x形架体12,上层x形架体11包括上层中部连接板和设置在上层中部连接板四角处的上层支板,下层x形架体12包括下层中部连接板和设置在下层中部连接板四角处的下层支板,飞控保护板7固定在上层中部连接板上,上层支板外侧固定有电机10,螺旋桨9连接在电机10的驱动轴上,受电机10驱动旋转;上层支板和对应的下层支板之间设有机翼2;
14.所述机翼2包括固定翼4和涵道5,其中上层支板和对应的下层支板之间连接有固定翼4;且所述上层支板和对应的下层支板之间从上至下依次设有电机固定板13和固定翼上挡板 14,其中固定翼上挡板14和电机固定板13之间固定有步进电机8,固定翼4设置在固定翼上挡板14和下层支板之间,且固定翼4内侧连接有固定翼连接架41,固定翼连接架41底部连接在下层支板上,顶部与步进电机8的输出轴齿轮连接,起落架3固定在下层支板内侧;
15.涵道5配合在上层x形架体11的上层支板上的涵道进风孔111、电机固定板13上的通孔和下层x形架体12的下层支板上的涵道出风豁口112内,并通过涵道固定架51连接在固定翼4内侧壁上;
16.所述固定翼4包括舵机6和固定翼骨架,其中舵机6固定在固定翼骨架上,且其传动轴通过涵道转轴54与涵道固定架51连接,能够控制涵道固定架51旋转,固定翼骨架的内侧固定在固定翼连接架41上。
17.所述固定翼骨架包括骨架55、舵机固定板56和固定翼支撑57,其中舵机固定板56固定在骨架55底部,舵机6固定在舵机固定板56上,骨架55上从左至右依次固定有多个固定翼支撑57,最内侧的固定翼支撑57与固定翼连接架41固定连接。
18.所述步进电机8的输出轴上连接有传动齿轮42,固定翼连接架41顶部通过从动齿轮轴 43连接在固定翼上挡板14上,从动齿轮轴43通过从动齿轮44与传动齿轮42啮合。
19.所述飞控保护板7包括上下两层碳板和减震球71,其中上下两层碳板通过支架固定在一起,下层碳板的四角处分别通过减震球71固定在上层中部连接板上。
20.所述上层支板前端的电机10上连接的为螺旋桨二92,上层支板后端的电机10上连接的为螺旋桨四94,上层支板左端的电机10上连接的为螺旋桨三93,上层支板右端的电机 10上连接的为螺旋桨一91。
21.所述位于上层支板和对应下层支板之间前端的为二号步进电机82,位于上层支板和对应下层支板之间后端的为四号步进电机84,位于上层支板和对应下层支板之间左端的为三号步进电机83,位于上层支板和对应下层支板之间右端的为一号步进电机701。
22.所述上层支板和对应下层支板之间前端的为固定翼三48,上层支板和对应下层支板之间后端的为固定翼一46,上层支板和对应下层支板之间左端的为固定翼二47,上层支板和对应下层支板之间右端的为固定翼四49。
23.所述设置在固定翼三48上的为涵道二59,固定翼一46上的为涵道四511,固定翼二 47上的为涵道三510,固定翼四49上的为涵道一58。
24.本发明还公开了一种基于上述可折叠式固定翼四旋翼复合无人机的控制方法,其包括控制上述可折叠式固定翼四旋翼复合无人机实现各种飞行姿态时的实现方法:
25.起飞姿态:
26.通过对应的电机10控制所述螺旋桨一91以预设速度顺时针旋转,所述螺旋桨二92以预设速度逆时针旋转,控制所述螺旋桨三93以预设速度顺时针旋转,所述螺旋桨四94以预设速度逆时针旋转;
27.通过对应涵道5上自带的电机控制所述涵道一58以预设速度顺时针旋转、所述涵道二59以预设速度逆时针旋转、所述涵道三510以预设速度顺时针旋转、所述涵道四511以预设速度逆时针旋转,为飞行器提供向上升力;
28.悬停时各螺旋桨9与各涵道5旋转方向不变,仅将各螺旋桨9与各涵道5的旋转速度降低为预设速度;
29.折叠与展开姿态:
30.展开时,所述螺旋桨一91、螺旋桨二92、螺旋桨三93、螺旋桨四94、涵道一58、涵道二59、涵道三510、涵道四511保持起飞时所述的状态不变,同时控制所述一号步进电机 81、二号步进电机82、三号步进电机83、四号步进电机84进行旋转,通过齿轮传动使得固定翼一46顺时针旋转135
°
,固定翼二47逆时针旋转135
°
,固定翼三48顺时针旋转135
°
,固定翼四49逆时针旋转135
°
;
31.折叠时,控制所述一号步进电机81、二号步进电机82、三号步进电机83、四号步进电机84以展开时的反方向旋转,通过齿轮传动,使得固定翼一46逆时针旋转135
°
,固定翼二47顺时针旋转135
°
,固定翼三48逆时针旋转135
°
,固定翼四49顺时针旋转135
°
;
32.改变偏航角姿态:
33.在保持悬停状态下,通过对应的电机10和对应涵道8自带电机控制所述涵道一58、螺旋桨一91、涵道三510、螺旋桨三93以预设速度按悬停时方向加速,通过对应电机10和对应涵道8自带电机控制涵道二59、螺旋桨二92、涵道四511、螺旋桨四94以预设速度按悬停时
方向减速,此时机身整体逆时针转动以改变偏航角;
34.通过对应电机10和对应涵道8自带电机控制所述涵道一58、螺旋桨一91、涵道三510、螺旋桨三93以预设速度按悬停时的方向减速,控制涵道二59、螺旋桨二92、涵道四511、螺旋桨四94以预设速度按悬停时的方向加速,此时机身整体会顺时针转动以改变偏航角;
35.改变俯仰角姿态:
36.在悬停状态下,通过对应的电机10和对应涵道8自带电机控制所述涵道一58、螺旋桨一91、涵道四511、螺旋桨四94按预设速度加速,控制所述涵道二59、螺旋桨二92、涵道三510、螺旋桨三93按预设速度减速,此时机身会逆时针旋转以改变俯仰角;
37.通过对应的电机10和对应涵道8自带电机控制所述涵道一58、螺旋桨一91、涵道四 511、螺旋桨四94按预设速度减速,控制所述涵道二59、螺旋桨二92、涵道三510、螺旋桨三93按预设速度加速,此时机身会顺时针旋转以改变俯仰角;
38.改变翻滚角姿态:
39.在悬停状态下,通过对应的电机10和对应涵道8自带电机控制所述涵道一58、螺旋桨一91、涵道二59、螺旋桨二92按预设速度加速,控制所述涵道三510、螺旋桨三93、涵道四511、螺旋桨四94按预设速度减速,此时机身会顺时针转动以改变翻滚角;
40.通过对应的电机10和对应涵道8自带电机控制所述涵道一58、螺旋桨一91、涵道二59、螺旋桨二92按预设速度减速,控制所述涵道三510、螺旋桨三93、涵道四511、螺旋桨四94按预设速度加速,此时机身会逆时针转动以改变翻滚角;
41.直线加速姿态:
42.在悬停状态下,对应涵道8自带电机控制所述涵道一58、涵道二59、涵道三510、涵道四511停止转动,同时通过对应电机10控制螺旋桨一91、螺旋桨二92、螺旋桨三93、螺旋桨四94加速至预设速度以保持悬停状态,通过各舵机6控制涵道一58、涵道二59、涵道三510、涵道四511顺时针旋转90
°
,通过对应涵道8自带电机控制涵道一58顺时针加速至预设速度,涵道三510顺时针加速至预设速度,涵道二59逆时针加速至预设速度,涵道四511逆时针加速至预设速度,此时飞行器为直线加速状态;
43.直线制动姿态:
44.在直线加速状态下,通过对应涵道8自带电机控制所述涵道一58、涵道二59、涵道三 510、涵道四511停止转动,通过各舵机6控制涵道一58、涵道二59、涵道三510、涵道四 511逆时针旋转180
°
,通过对应的涵道8自带电机控制涵道一58顺时针加速至预设速度,控制涵道三510顺时针加速至预设速度,控制涵道二59逆时针加速至预设速度,控制涵道四511逆时针加速至预设速度,此时飞行器为制动状态;
45.爬升姿态:
46.保持以预设速度的各个涵道5在直线加速状态下,通过对应的电机10控制螺旋桨一91、螺旋桨四94加速至整机俯仰角达到目标姿态时,控制螺旋桨一91、螺旋桨四94恢复到直线加速前的原态以改变飞行器俯仰角保持爬升状态;
47.俯冲姿态:
48.保持以预设速度的各个涵道5在直线加速状态下,通过对应的电机10控制螺旋桨二92、螺旋桨三93加速至俯仰角达到目标姿态时恢复原态,以改变飞行器俯仰角保持俯冲状态。
49.本发明的有益效果:
50.本发明具有固定翼旋翼复合飞行器垂直起降,不受场地限制,以及兼具固定翼飞行器,旋翼飞行器的基本优点。同时可通过折叠的方式在地面以及空中进行飞行模式的转变。在四旋翼模式时,通过简单的贴合设计减小固定翼气动对四旋翼的影响,同时利用固定翼的驱动涵道为四旋翼提供额外动力。在固定翼四旋翼复合状态下,可通过机臂上四旋翼调节不同的转速可控制整体飞行器的姿态,同时可以改变涵道的角度来为飞行器提供动力或阻力。
附图说明
51.图1为本发明的结构示意图。
52.图2为本发明展开时的结构示意图。
53.图3为本发明涵道旋转作为驱动的结构示意图。
54.图4为本发明双层机臂及机翼复合结构示意图。
55.图5为本发明涵道连接结构示意图。
56.图6为本发明双层机臂上涵道通风口结构示意图。
57.其中:双层机臂1、上层x形架体11、涵道进风孔111、涵道出风豁口112、下层x形架体12、电机固定板13、固定翼上挡板14、隔离柱15、机翼2、起落架3、固定翼4、固定翼连接架41、传动齿轮42、从动齿轮轴43、从动齿轮44、轴承45、固定翼一46、固定翼二47、固定翼三48、固定翼四49、涵道5、涵道固定架51、涵道电机52、螺栓螺母53、涵道转轴54、骨架55、舵机固定板56、固定翼支撑57、涵道一58、涵道二59、涵道三510、涵道四511、舵机6、飞控保护板7、减震球71、步进电机8、一号步进电机81、二号步进电机82、三号步进电机83、四号步进电机84、螺旋桨9、螺旋桨一91、螺旋桨二92、螺旋桨三93、螺旋桨四94、电机10。
具体实施方式
58.实施例1
59.一种可折叠式固定翼四旋翼复合无人机,包括双层机臂1、机翼2、固定翼4、飞控保护板7、螺旋桨9、电机10,其中双层机臂1包括结构相同且对齐设置的上层x形架体11 和下层x形架体12,上层x形架体11包括上层中部连接板和设置在上层中部连接板四角处的上层支板,下层x形架体12包括下层中部连接板和设置在下层中部连接板四角处的下层支板,飞控保护板7固定在上层中部连接板上,上层支板内侧设有涵道通孔,外侧固定有电机10,螺旋桨9连接在电机10的驱动轴上,受电机10驱动旋转;上层支板和对应的下层支板之间设有机翼2;
60.所述机翼2包括固定翼4和涵道5,其中上层支板和对应的下层支板之间连接有固定翼 4,固定翼4的内侧连接有涵道5,且涵道5配合在上层支板和对应的下层支板之间;
61.所述上层支板和对应的下层支板之间从上至下依次设有电机固定板13和固定翼上挡板 14,其中上层支板和电机固定板13之间、电机固定板13和固定翼上挡板14之间以及下层支板和电机固定板13之间分别通过隔离柱15连接;固定翼上挡板14和电机固定板13之间固定有步进电机8,固定翼连接架41底部连接在下层支板上,顶部与步进电机8的输出轴齿轮连接,固定翼4内侧连接在固定翼连接架41上,固定翼4设置在固定翼上挡板14和下层
支板之间,且固定翼4外侧的涵道5位于固定翼上挡板14外侧的电机固定板13下方,起落架3固定在下层支板内侧;
62.自带涵道电机52的涵道5配合在上层x形架体11的上层支板上的涵道进风孔111、电机固定板13上的通孔和下层x形架体12的下层支板上的涵道出风豁口112内,并通过涵道固定架51连接在固定翼4内侧壁上;
63.所述涵道5底部为涵道5自带的涵道电机52,涵道5内部叶片所在的转轴连接在涵道电机52的驱动轴上,受涵道电机52控制转动。舵机6控制涵道5以固定翼4为轴旋转,控制其喷气方向以达到加速或者减速的目的。
64.所述固定翼4包括舵机6和固定翼骨架,其中舵机6固定在固定翼骨架上,且其传动轴通过涵道转轴54与涵道固定架51连接,能够控制涵道固定架51旋转,固定翼骨架的内侧固定在固定翼连接架41上。
65.所述固定翼骨架包括骨架55、舵机固定板56和固定翼支撑57,其中舵机固定板56固定在骨架55底部,舵机6固定在舵机固定板56上,骨架55上从左至右依次固定有多个固定翼支撑57,最内侧的固定翼支撑57与固定翼连接架41固定。固定翼支撑57上有两个孔,固定翼连接架41穿入该孔中固定,且固定翼连接架41与从动齿轮44的转轴刚性连接。
66.所述步进电机8的输出轴上连接有传动齿轮42,固定翼连接架41底部连接在下层支板上,顶部通过从动齿轮轴43连接在固定翼上挡板14上,从动齿轮轴43通过从动齿轮44与传动齿轮42啮合。
67.从动齿轮轴43通过轴承45连接在固定翼上挡板14上;传动齿轮42和从动齿轮44互相啮合,分别过盈固定在步进电机8输出轴以及固定翼连接架41顶端。
68.所述飞控保护板7包括上下两层碳板和减震球71,其中上下两层碳板通过支架固定在一起,下层碳板的四角处分别通过减震球71固定在上层中部连接板上。
69.其中上层碳板在上方保护飞控,下层碳板承载飞控,减震球71在下方保护飞控。
70.在上层中部连接板及飞控保护板7的下层碳板相对应位置分别打有4个圆孔,每个减震球71依次连接上层中部连接板及下层碳板,将上层中部连接板及下层碳板连接,利用减震球71的缓冲作用对飞控内置传感器起到保护作用。
71.所述上层支板前端的电机10上连接的为螺旋桨二92,上层支板后端的电机10上连接的为螺旋桨四94,上层支板左端的电机10上连接的为螺旋桨三93,上层支板右端的电机 10上连接的为螺旋桨一91。
72.所述位于上层支板和对应下层支板之间前端的为二号步进电机82,位于上层支板和对应下层支板之间后端的为四号步进电机84,位于上层支板和对应下层支板之间左端的为三号步进电机83,位于上层支板和对应下层支板之间右端的为一号步进电机701。
73.所述上层支板和对应下层支板之间前端的为固定翼三48,上层支板和对应下层支板之间后端的为固定翼一46,上层支板和对应下层支板之间左端的为固定翼二47,上层支板和对应下层支板之间右端的为固定翼四49。
74.所述设置在固定翼三48上的为涵道二59,固定翼一46上的为涵道四511,固定翼二 47上的为涵道三510,固定翼四49上的为涵道一58。
75.本发明还公开了一种基于上述可折叠式固定翼四旋翼复合无人机的控制方法,其包括控制上述可折叠式固定翼四旋翼复合无人机实现各种飞行姿态时的实现方法:
76.起飞姿态:
77.通过对应的电机10控制所述螺旋桨一91以预设速度顺时针旋转,所述螺旋桨二92以预设速度逆时针旋转,控制所述螺旋桨三93以预设速度顺时针旋转,所述螺旋桨四94以预设速度逆时针旋转;
78.通过对应涵道5上自带的电机控制所述涵道一58以预设速度顺时针旋转、所述涵道二 59以预设速度逆时针旋转、所述涵道三510以预设速度顺时针旋转、所述涵道四511以预设速度逆时针旋转,为飞行器提供向上升力;
79.悬停时各螺旋桨9与各涵道5旋转方向不变,仅将各螺旋桨9与各涵道5的旋转速度降低为预设速度;
80.折叠与展开姿态:
81.展开时,飞行器上升至一定高度,所述螺旋桨一91、螺旋桨二92、螺旋桨三93、螺旋桨四94、涵道一58、涵道二59、涵道三510、涵道四511保持起飞时所述的状态不变,同时控制所述一号步进电机81、二号步进电机82、三号步进电机83、四号步进电机84进行旋转,通过齿轮传动使得固定翼一46顺时针旋转135
°
,固定翼二47逆时针旋转135
°
,固定翼三48顺时针旋转135
°
,固定翼四49逆时针旋转135
°
;
82.折叠时,控制所述一号步进电机81、二号步进电机82、三号步进电机83、四号步进电机84以展开时的反方向旋转,通过齿轮传动,使得固定翼一46逆时针旋转135
°
,固定翼二47顺时针旋转135
°
,固定翼三48逆时针旋转135
°
,固定翼四49顺时针旋转135
°
;
83.改变偏航角姿态:
84.在保持悬停状态下所述螺旋桨与涵道状态的基础上,通过对应的电机10和对应涵道8 自带电机控制所述涵道一58、螺旋桨一91、涵道三510、螺旋桨三93以预设速度按悬停时方向加速,通过对应电机10和对应涵道8自带电机控制涵道二59、螺旋桨二92、涵道四 511、螺旋桨四94以预设速度按悬停时方向减速,此时机身整体会绕z轴逆时针转动以改变偏航角;
85.通过对应电机10和对应涵道8自带电机控制所述涵道一58、螺旋桨一91、涵道三510、螺旋桨三93以预设速度按悬停时的方向减速,控制涵道二59、螺旋桨二92、涵道四511、螺旋桨四94以预设速度按悬停时的方向加速,此时机身整体会绕z轴顺时针转动以改变偏航角;
86.改变俯仰角姿态:
87.在悬停状态下所述螺旋桨与涵道状态的基础上,通过对应的电机10和对应涵道8自带电机控制所述涵道一58、螺旋桨一91、涵道四511、螺旋桨四94按预设速度加速,控制所述涵道二59、螺旋桨二92、涵道三510、螺旋桨三93按预设速度减速,此时机身会绕y轴逆时针旋转以改变俯仰角;
88.通过对应的电机10和对应涵道8自带电机控制所述涵道一58、螺旋桨一91、涵道四 511、螺旋桨四94按预设速度减速,控制所述涵道二59、螺旋桨二92、涵道三510、螺旋桨三93按预设速度加速,此时机身会绕y轴顺时针旋转以改变俯仰角;
89.改变翻滚角姿态:
90.在悬停状态下所述螺旋桨与涵道状态的基础上,通过对应的电机10和对应涵道8自带电机控制所述涵道一58、螺旋桨一91、涵道二59、螺旋桨二92按预设速度加速,控制所
述涵道三510、螺旋桨三93、涵道四511、螺旋桨四94按预设速度减速,此时机身会绕x 轴顺时针转动以改变翻滚角;
91.通过对应的电机10和对应涵道8自带电机控制所述涵道一58、螺旋桨一91、涵道二 59、螺旋桨二92按预设速度减速,控制所述涵道三510、螺旋桨三93、涵道四511、螺旋桨四94按预设速度加速,此时机身会绕x轴逆时针转动以改变翻滚角;
92.直线加速姿态:如图3所示;
93.在悬停状态下所述螺旋桨与涵道状态的基础上,对应涵道8自带电机控制所述涵道一 58、涵道二59、涵道三510、涵道四511停止转动,同时通过对应电机10控制螺旋桨一91、螺旋桨二92、螺旋桨三93、螺旋桨四94加速至预设速度以保持悬停状态,通过各舵机6控制涵道一58、涵道二59、涵道三510、涵道四511绕y轴顺时针旋转90
°
,通过对应涵道 8自带电机控制涵道一58顺时针加速至预设速度,涵道三510顺时针加速至预设速度,涵道二59逆时针加速至预设速度,涵道四511逆时针加速至预设速度,此时飞行器为直线加速状态;
94.直线制动姿态:
95.在直线加速状态下,通过对应涵道8自带电机控制所述涵道一58、涵道二59、涵道三 510、涵道四511停止转动,通过各舵机6控制涵道一58、涵道二59、涵道三510、涵道四 511绕y轴逆时针旋转180
°
,通过对应的涵道8自带电机控制涵道一58顺时针加速至预设速度,控制涵道三510顺时针加速至预设速度,控制涵道二59逆时针加速至预设速度,控制涵道四511逆时针加速至预设速度,此时飞行器为制动状态;
96.爬升姿态:
97.保持以预设速度的各个涵道5在直线加速状态下,通过对应的电机10控制螺旋桨一91、螺旋桨四94加速至整机俯仰角达到目标姿态时,控制螺旋桨一91、螺旋桨四94恢复到直线加速前的原态以改变飞行器俯仰角保持爬升状态;
98.俯冲姿态:
99.保持以预设速度的各个涵道5在直线加速状态下,通过对应的电机10控制螺旋桨二92、螺旋桨三93加速至俯仰角达到目标姿态时恢复原态,以改变飞行器俯仰角保持俯冲状态。
100.预设速度是根据传感器所反馈的姿态与目标姿态的差值利用pid算法去控制电机以一定速度使这个差值不断减小直到为零,每个时刻的具体数值需要飞控不断解算。
101.实施例2
102.如图1
‑
6所示,一种可折叠式固定翼四旋翼复合无人机,包括双层机臂1、机翼2、及连接双层机臂1与机翼2的折叠机构及固定于双层机臂1上层的飞控保护板7,飞控保护板7下层四角安装有减震球71、及安装在双层机臂1上层四角边缘的电机10,电机10上装有螺旋桨9、及与机翼2相连的涵道5;双层机臂1下层中心是电源模块存放区;四旋翼飞行模式时螺旋浆9及涵道5转动,相邻电机10的转向相反,对角线电机10的转向相同。
103.如图6所示,四旋翼飞行模式时,涵道5与涵道进风孔111相契合,涵道电机52与涵道出风豁口112相契合。
104.如图4所示,固定翼4焊接在固定翼连接架41上,固定翼连接架41通过轴承45连接在固定翼上挡板14与下层x形架体12的下层支板之间外侧。固定翼连接架41上装有从动齿轮44,从动齿轮44与步进电机8上传动齿轮42啮合,步进电机8固定于固定翼上挡板 14与电
机固定板13之间。固定翼上挡板14与电机固定板13通过板连接隔离柱15连接,双层机臂上层与电机固定板13通过板连接螺栓螺母隔离柱15连接。
105.如图5所示,涵道5被两块半圆形的涵道固定架51通过用于涵道固定的螺栓螺母53过盈配合固定,涵道固定架51与涵道转轴54焊接固定,涵道转轴54与舵机6并一起固定在舵机固定板56,所示舵机固定板56嵌于两根固定翼支撑57之间。两根固定翼支撑57贯穿 3块固定翼的骨架55焊接固定,并通过蒙皮形成机翼。
106.如图4所示,步进电机8带动传动齿轮42,传动齿轮42与从动齿轮44啮合传动改变运动方向,从动齿轮44带动43转动使固定翼展开如图2所示。
107.如图5所示,舵机6可控制涵道5绕机臂轴线旋转为飞行器提供驱动力如图3所示。
108.如图2所示,固定翼4旋转时,为保证飞行器偏航率不变,固定翼一46逆时针旋转135
°
,固定翼二47顺时针旋转135
°
,固定翼三48逆时针旋转135
°
,固定翼四49顺时针旋转 135
°
。
109.如图3所示,涵道5通过舵机6进行旋转,涵道5旋转90
°
或
‑
90
°
时可作为驱动力或者阻力。
110.所述折叠机构里步进电机8驱动齿轮啮合传动,使机翼2展开或折叠。
111.所述飞行器能在悬停状态进行飞行模式变形。
112.所述涵道5能绕机臂中心轴旋转,可在展开状态改变驱动方向。
113.所述飞行器能通过调整涵道5旋转方向进行加速或制动。
114.上述双层机臂1上均开有适应于涵道5的通风口,在机翼2折叠时涵道5通风气流不收影响。且相邻机臂2上的涵道5转向始终相反。
115.在四旋翼模式时涵道5能为四旋翼提供附加动力,在固定翼四旋翼复合模式时,涵道5 的转向设置保证飞行器角动量始终为零,飞行器不会因为涵道5发生翻滚。
116.上述电源飞控固定机架,上层隔板用于固定飞控,并在隔板下方安装有减震球71,减小振动对飞控内部imu单元的影响。下层x形架体12用于安放电池电源,各个电路模块。
117.上层支板和固定翼4上方之间、固定翼4下方和下层支板之间完全贴合,不留空隙,减少空气在上下翼面的流动,以免飞行时对姿态造成影响。
118.同时降低四旋翼模式时固定翼上下表面的气体流动对四旋翼的飞行所造成的影响,使四旋翼模式时飞行器更加贴近纯粹四旋翼飞行器的飞行特点。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。