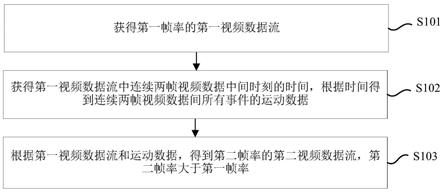
1.本公开涉及读取原稿的图像的图像读取装置以及包括该图像读取装置的图像形成装置。
背景技术:
2.在扫描仪和复印机中所包括的图像读取装置常规地设置有自动原稿进给器(以下称为adf),所述自动原稿进给器依次进给堆叠在原稿托盘上的原稿,将每张原稿传送到图像读取位置,读取原稿的图像,并且将原稿排出到排出托盘。在adf中,通过将原稿放置在水平原稿托盘上并且操作设置在原稿托盘上的侧管控板这样的用户操作,将adf配置成在宽度方向上对齐原稿。
3.对于adf所用的原稿托盘,已知用于在用户的原稿放置操作中通过原稿的自重使原稿与向前侧倾斜的原稿托盘对齐的技术。日本专利申请特开第2003
‑
323084号讨论了一种技术,对于配置成使原稿托盘向前侧倾斜的adf,所述技术使用户即使从低视点位置也能够看到原稿托盘的原稿堆叠表面。更具体地,当具有低视点位置的用户为了更易于查看而改变操作面板单元的倾斜角度时,原稿托盘的倾斜角度被自动地改变。
4.在日本专利申请特开第2003
‑
323084号所讨论的配置中,用户需要执行用于使操作面板单元倾斜以使原稿托盘向前侧倾斜的操作。此外,在用户手持原稿的情况下,用户要在手持原稿的同时执行用于使原稿托盘向前侧倾斜的操作。这会不利地影响原稿放置的可操作性。
技术实现要素:
5.本公开涉及在原稿托盘向前侧倾斜的状态下改善在其上放置原稿的图像读取装置的可操作性、以及改善包括该图像读取装置的图像形成装置的可操作性。
6.根据本公开的一方面,一种图像读取装置包括:第一堆叠单元,所述第一堆叠单元具有在其上堆叠原稿的堆叠表面,以及抵接部分,堆叠在所述堆叠表面上的原稿的沿宽度方向的原稿端部抵接在所述抵接部分上;进给单元,所述进给单元配置成在与原稿宽度方向正交的进给方向上进给堆叠在所述第一堆叠单元上的原稿;读取单元,所述读取单元配置成读取由所述进给单元进给的原稿的图像;第二堆叠单元,所述第二堆叠单元配置成接收由所述读取单元读取并排出到所述第二堆叠单元的原稿;检测单元,所述检测单元配置成检测所述第二堆叠单元上是否存在原稿;旋转轴,所述旋转轴在所述进给方向上延伸并且配置成可旋转地支撑所述第一堆叠单元;驱动单元,所述驱动单元配置成使所述第一堆叠单元围绕所述旋转轴旋转;以及控制单元,所述控制单元配置成控制所述驱动单元,其中,基于由所述检测单元检测到在所述第二堆叠单元上不存在原稿,所述控制单元控制所述驱动单元以使所述第一堆叠单元在使所述抵接部分降低的方向上旋转。
7.根据参考附图对示例性实施例的以下描述,本公开的其他特征将变得显而易见。
附图说明
8.图1是示出根据本示例性实施例的图像形成装置的横截面图。
9.图2是示出根据本示例性实施例的图像读取装置的横截面图。
10.图3是示出根据本示例性实施例的原稿托盘的俯视图。
11.图4是示出在根据本示例性实施例的图像读取装置中放置原稿的状态的右侧视图。
12.图5是示出在根据本示例性实施例的图像读取装置中进给原稿的状态的右侧视图。
13.图6是示出根据本示例性实施例的图像形成装置的控制部件的框图。
14.图7是示出了根据本示例性实施例的原稿读取操作的流程图。
具体实施方式
15.下面将参照附图描述本公开的优选示例性实施例。
16.<图像形成装置101的配置>
17.以下将参照图1描述根据本示例性实施例的图像形成装置101的总体配置。图1是示出根据本示例性实施例的图像形成装置101的横截面图。在下面的描述中,用户面对用于在图像形成装置101上执行各种输入/设定操作的操作单元104的位置被称为图像形成装置101的“前侧”,并且背面侧被称为图像形成装置101的“后侧”。更具体地,图1示出了从前侧观察时的图像形成装置101的内部配置。
18.如图1中所示,图像形成装置101包括装置本体101a和图像读取装置103。布置在装置本体101a的顶部上的图像读取装置103包括读取器20和自动原稿进给器(以下称为adf)1(在下文中详细描述)。图像读取装置103光学地扫描原稿d以读取图像信息。原稿d是诸如打印片材和信封的纸、诸如高架投影仪(ohp)片材的塑料膜、以及诸如布的片材。由图像读取装置103转换成电信号的图像信息被传送到装置本体101a中所包括的图6中所示的控制单元132(在下文中描述)。装置本体101a基于由图像读取装置103读取的图像在作为记录材料的片材p上形成图像。
19.装置本体101a包括在作为记录材料的片材p上形成图像的图像形成单元133、以及将片材p进给到图像形成单元133的片材进给单元34。片材进给单元34包括能够储存不同尺寸的片材的片材储存单元137a、137b、137c和137d。储存在片材储存单元137a、137b、137c和137d中的片材通过拾取辊32拾取,通过进给辊33a和延迟辊33b与其他片材分离,然后被传送到对应的传送辊对131。然后,片材p被依次传送到沿着片材传送路径布置的多个传送辊对131,然后被传送到对齐辊对136。
20.由用户放置在手动进给托盘137e上的片材p由进给辊138进给到装置本体101a的内部,然后被传送到对齐辊对136。对齐辊对136停止片材p的前缘以校正歪斜,并且与图像形成单元133进行的用于调色剂图像形成处理的图像形成操作的进展同步地重新开始片材p的传送。
21.在片材p上形成图像的图像形成单元133是包括作为感光部件的感光鼓121的电子照相图像形成单元。感光鼓121可以沿着片材p的传送方向旋转。在感光鼓121的周围设置有充电装置118、曝光装置123、显影装置124、转印充电装置125、分离充电装置126和清洁器
127。充电装置118使感光鼓121的表面均匀充电。曝光装置123基于从图像读取装置103输入的图像信息使感光鼓121曝光,以在感光鼓121上形成静电潜像。
22.包括含有调色剂的显影剂的显影装置124通过将带电的调色剂供应到感光鼓121而将静电潜像显影为调色剂图像。感光鼓121所承载的调色剂图像通过转印充电装置125形成的偏压电场而被转印到从对齐辊对136传送的片材p上。其上转印有调色剂图像的片材p通过分离充电装置126形成的偏压电场与感光鼓121分离,然后通过定影前传送单元128传送到定影单元129。通过清洁器127移除感光鼓121上的粘附物质,例如残留调色剂(未转印到片材p上的调色剂)。然后,感光鼓121为下一次图像形成操作做好准备。
23.传送到定影单元129的片材p在由辊对保持和传送的同时,经受包括调色剂图像的加压和加热的定影处理。在调色剂熔化且随后牢固地粘附至片材p之后,图像被定影到片材p。当图像输出完成时,具有定影图像的片材p经由排出辊对40排出到向装置本体101a的外部突出的排出托盘130。当在双面打印中在片材p的背面上形成图像时,穿过定影单元129的片材p由反转单元139反转,然后通过双面传送单元140传送到对齐辊对136。然后,通过图像形成单元133再次在其上形成有另一图像的片材p被排出到排出托盘130。
24.上述的图像形成单元133是图像形成单元的示例。例如,可以将喷墨图像形成单元或胶印机构用作图像形成单元133。
25.<图像读取装置103的配置>
26.下面将参照图2描述图像读取装置103的总体配置。图2是示出图像读取装置103的横截面图。以下的示例性实施例中描述的元件的尺寸、材料、形状以及相对布置不限于此。除非另有具体说明,否则本公开的范围不限于以下描述的示例性实施例。
27.如图2中所示,adf 1包括作为第一堆叠单元的原稿托盘2、传送单元12、以及作为第二堆叠单元的排出托盘3。排出托盘3设置在原稿托盘2的下方。adf 1以可打开和可关闭的方式附接到读取器20的上表面。adf 1将原稿d传送到设置在读取器20的上表面上的原稿进给读取玻璃上的读取位置。原稿d被放置到adf 1中的原稿托盘2。原稿托盘2由沿着进给方向f延伸的旋转轴11支撑为能够相对于传送单元12旋转。旋转轴11布置在原稿托盘2的宽度方向的中心附近。根据本示例性实施例的进给方向f是通过进给辊4(在下文描述)进给原稿d的方向以及在进纸时沿着原稿堆叠表面2a的方向。进给方向f在进纸时与原稿托盘2的宽度方向正交。宽度方向是图像读取装置103读取原稿d的图像时的主扫描方向。
28.原稿托盘2由旋转轴11支撑为能够相对于传送单元12旋转。由于原稿托盘2固定到旋转轴11,因此旋转轴11的旋转使原稿托盘2一体地旋转。原稿托盘2通过来自作为驱动单元的马达13的驱动力而旋转。尽管在本示例性实施例中,马达13设置在传送单元12的内部,但是马达13的布置不限于此。例如,马达13可以设置在原稿托盘2的内部,或者设置在用于向每个传送辊(在下文描述)施加旋转驱动力的驱动单元的一侧。
29.如图2中所示,adf 1包括原稿检测传感器16、排出原稿检测传感器17、以及排出传感器18。原稿检测传感器16、排出原稿检测传感器17和排出传感器18连接到中央处理单元(cpu)的输入端口并且用于监测原稿d的行为。原稿检测传感器16设置在原稿托盘2上以检测在原稿托盘2上是否存在原稿d。作为检测单元的排出原稿检测传感器17设置在排出托盘3上以检测在排出托盘3上是否存在原稿d。排出传感器18设置在原稿传送路径中的排出辊对10的上游侧以检测原稿d的后端。排出传感器18用于检测原稿d已被排出。当原稿检测传
感器16在进给操作期间检测到原稿托盘2上已经没有原稿d时,cpu 21(在下文描述)可以确定紧接在该检测之前进给的原稿d即为最终原稿。
30.如图2中所示,adf 1包括进给辊4、进给辊5、分离辊6、传送辊对7、8和9、以及排出辊对10。图像读取部e设置在传送辊对8的沿传送方向的下游侧。图像读取部e包括设置在读取器20上的前表面读取单元14和设置在adf 1上的后表面读取单元15。原稿托盘2上的原稿d通过作为进给单元的进给辊4的旋转驱动力送至进给辊5。通过进给辊5以及由弹簧从下方推压的分离辊6之间的摩擦逐一地分离原稿d。分离的原稿d通过传送辊对7和8的旋转驱动力送至图像读取部e。已送至图像读取部e的原稿d由作为读取单元的前表面读取单元14和后表面读取单元15在两个表面上进行图像读取。然后,原稿d通过传送辊对9传送到排出辊对10,并且通过排出辊对10排出到排出托盘3。根据本示例性实施例,从放置在原稿托盘2上的原稿d通过进给辊4进给开始直至原稿d通过排出辊对10排出到排出托盘3的一系列操作被称为“原稿读取操作”。
31.<原稿托盘2的配置>
32.下面将参照图3、图4和图5描述原稿托盘2的配置。图3是示出原稿托盘2的俯视图。图4示出了在放置原稿d时的原稿托盘2的状态。图5示出了在进给放置的原稿d时的原稿托盘2的状态。
33.如图3中所示,原稿托盘2包括原稿堆叠表面2a和作为止挡部件的原稿抵接部分2b。原稿抵接部分2b在操作单元104侧(前侧)固定到原稿托盘2。原稿堆叠表面2a具有在进给方向f的下游端200处靠近原稿抵接部分2b的第一边缘200a、以及沿宽度方向在第一边缘200a的相对侧的第二边缘200b。
34.用户在原稿托盘2向前侧倾斜的状态下放置原稿d。在该状态下,原稿托盘2处于向前侧倾斜的第二状态,如图4中所示。当从沿着进给方向f的方向观察时,由于原稿堆叠表面2a相对于水平方向以角θ向前侧倾斜,因此由用户放置的原稿d通过其自重而向前侧移动。由于原稿抵接部分2b布置在原稿托盘2的前侧,因此通过其自重移动的原稿d的宽度方向的一端抵接在原稿抵接部分2b上,因此原稿d对齐。这使得能够省去用户原本要特意执行的对齐原稿d的常规动作,使得放置原稿d更容易。在原稿堆叠表面2a相对于水平方向以角θ倾斜的状态下,原稿堆叠表面2a未与传送单元12的传送路径平滑地连接。更具体地,原稿堆叠表面2a在进给方向f的下游端偏离引导件(其形成传送单元12的传送路径)的上游端。因此,在原稿托盘2向前侧倾斜的第二状态下,adf 1不能执行进给操作。
35.尽管根据本示例性实施例的角θ为30度,但是角θ不限于此,而是可以为0<θ<40。角θ的上限40度是在抵接在原稿抵接部分2b上的放置原稿d不会弯曲的最大倾斜角。根据本示例性实施例,考虑到放置原稿d时的可视性,原稿抵接部分2b在进给方向f上的长度设定为150mm,但是本公开不限于此。
36.如上所述,用户在原稿托盘2向前侧倾斜的状态下放置原稿d。然而,在原稿托盘2向前侧倾斜的状态下,adf 1不能执行进给操作。因此,在放置原稿d之后,原稿托盘2在原稿d放置于原稿托盘2上的同时进行旋转,以使原稿抵接部分2b的位置高于图4中所示的状态。更具体地,原稿托盘2在沿宽度方向的原稿抵接部分2b侧的第一边缘200a变为高于相对侧的第二边缘200b的方向(图4中的箭头b的方向)上旋转。在原稿托盘2以该方式在箭头b的方向上旋转之后,原稿托盘2处于第一状态(图5中的状态),在该第一状态中前侧的高度与后
侧的高度大致相同。然后,adf 1开始原稿d的进给操作。更具体地,当原稿托盘2处于第一状态时,adf 1可以执行进给操作。在该操作中,原稿托盘2响应于来自操作单元104的用于开始原稿读取操作的用户指令而开始旋转。
37.根据本示例性实施例,在从沿着进给方向f的方向观察的情况下,当原稿托盘2处于第一状态时,原稿堆叠表面2a相对于水平方向的角θ被设定为零度。然而,在开始进给操作时只要原稿堆叠表面2a与传送单元12的传送路径平滑地连接就足够了。因此,当开始进给操作时,在可以执行进给操作的范围内,原稿堆叠表面2a可以相对于水平方向略微倾斜。
38.在最终原稿经受图像读取且被排出之后,并且在用户从排出托盘3取出读取过的原稿d时,原稿托盘2旋转以降低原稿抵接部分2b的位置。更具体地,原稿托盘2在使宽度方向上的原稿抵接部分2b侧的第一边缘200a变为低于相对侧的第二边缘200b的方向(图5中的箭头c的方向)上旋转。在原稿托盘2以该方式在箭头c的方向上旋转之后,原稿托盘2再次处于第二状态,在该第二状态中不能执行进给操作。在用户在最终原稿被排出之前就取出排出托盘3上的原稿d的情况下,原稿托盘2不旋转并保持在第一状态。这就意味着,当原稿托盘2上存在原稿d时,即使在从排出托盘3取出原稿之后,原稿托盘2也不会从第一状态转变到第二状态。
39.<图像读取装置103的控制部件>
40.下面将参照图6描述图像读取装置103的控制部件。图6是示出根据本示例性实施例的图像读取装置103和包括该图像读取装置103的图像形成装置101的控制部件的框图。
41.在图像读取装置103中,作为中央处理单元的cpu 21执行程序以完全控制读取器20和adf 1的每个单元。只读存储器(rom)24是用于存储将由cpu 21作为程序执行的控制细节以及将用于程序执行的数据的存储装置。随机存取存储器(ram)25是用作供cpu 21执行控制的工作区域的存储装置。
42.为了实现原稿传送功能,作为用于驱动布置在adf 1中的每个传送辊的驱动源的传送马达19连接到cpu 21,并且作为用于旋转原稿托盘2的驱动源的马达13也连接到cpu 21。cpu 21控制传送马达19和马达13的驱动。原稿检测传感器16、排出原稿检测传感器17和排出传感器18也连接到cpu 21。cpu 21接收来自这些传感器的信号,并且基于接收到的信号控制每个单元。
43.用于在副扫描方向上移动前表面读取单元14的光学系统马达22和光学系统hp传感器23连接到cpu 21。光学系统hp传感器23检测前表面读取单元14在通过光学系统马达22使前表面读取单元14移动的移动方向上的位置。前表面读取单元14和后表面读取单元15是用于扫描原稿d的图像以基于行来执行图像读取的图像传感器单元。
44.控制单元132是信息处理装置,其整体地控制作为包括读取器20和adf 1的图像读取系统的图像形成装置101。cpu 21经由控制单元132和通信线路51交换用于图像读取控制的控制命令和控制数据。例如,控制单元132从操作单元104接收用户开始图像读取操作的指令,并且将开始图像读取的请求传送到cpu 21。
45.cpu 21可以测量从原稿读取操作结束时起经过的时间t。cpu 21还确定从原稿读取操作结束时起经过的时间t是否等于或长于预定时间t(根据本示例性实施例为60秒)。在从原稿读取操作结束时起经过的时间t等于或长于预定时间t的情况下,cpu 21驱动马达13以使原稿托盘2向前侧倾斜。由此,在用户忘记取出被排出的原稿d的情况下,当从原稿读取
操作结束时起经过了预定时间t时,原稿托盘2就转变成向前侧倾斜的状态。
46.<原稿读取处理过程>
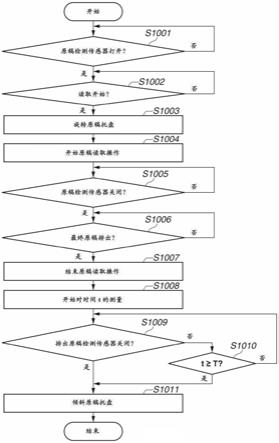
47.下面将参照图7描述用于读取原稿d的图像的处理过程。图7是示出用于读取堆叠在原稿托盘2上的原稿d的图像的处理过程的流程图。该流程图的处理由cpu 21执行。
48.在作为控制单元的cpu 21从原稿检测传感器16接收到当用户将原稿d放置在原稿托盘2上时所生成的信号的情况下(在步骤s1001中为“是”),处理进入步骤s1002。在该操作中,原稿托盘2处于向前侧倾斜的第二状态。
49.在控制单元132接收到用于由用户开始原稿读取操作的指令的情况下(在步骤s1002中为“是”),处理进入步骤s1003。在步骤s1003中,cpu 21驱动马达13。来自马达13的驱动力使原稿托盘2在图4中的箭头b的方向上旋转。因此,原稿托盘2从不能执行进给操作的第二状态转变为可以执行进给操作的第一状态。
50.当在步骤s1003中原稿托盘2转变为可以执行进给操作的状态时,处理进入步骤s1004。在步骤s1004中,cpu 21开始原稿读取操作。当cpu 21开始原稿读取操作时,图像读取装置103利用上述的辊传送堆叠在原稿托盘2上的原稿d并且读取原稿d的图像。
51.在cpu 21从原稿检测传感器16接收到指示原稿托盘2已经进给最终原稿并且原稿托盘2上已经没有原稿d的信号的情况下(在步骤s1005中为“是”),处理进入步骤s1006。同时,在原稿托盘2上仍有未读取原稿d的情况下(在步骤s1005中为“否”),cpu 21重复或执行原稿d的进给操作,直至cpu 21从原稿检测传感器16接收到指示原稿托盘2上已经没有原稿d的信号。
52.在cpu 21从排出传感器18接收到指示已排出最终原稿的信号的情况下(在步骤s1006中为“是”),处理进入步骤s1007。在步骤s1007中,cpu 21结束原稿读取操作。在步骤s1008中,cpu 21开始测量从原稿读取操作结束时起经过的时间t。
53.在cpu 21接收到来自排出原稿检测传感器17的指示用户已经从排出托盘3取出被排出原稿d的信号的情况下(在步骤s1009中为“是”),处理进入步骤s1011。指示用户已经从排出托盘3取出原稿d的信号意味着从排出原稿检测传感器17输出到cpu 21的信号已经从指示原稿d存在的信号转变为指示原稿d不存在的信号。在步骤s1011中,cpu 21驱动马达13。来自马达13的驱动力在箭头c的方向上旋转原稿托盘2以将原稿托盘2转变为原稿托盘2向前侧倾斜的状态。因此,原稿托盘2从可以执行进给操作的第一状态转变为不能执行进给操作的第二状态。然后,cpu 21结束该流程图的处理。
54.同时,在用户忘记从排出托盘3取出被排出的原稿d的情况下(在步骤s1009中为“否”),处理进入步骤s1010。在步骤s1010中,cpu21确定从原稿读取操作结束时起经过的时间t是否等于或长于预定时间t(根据本示例性实施例为60秒)。在cpu 21确定从原稿读取操作结束时起经过的时间t等于或长于预定时间t的情况下(在步骤s1010中为“是”),处理进入步骤s1011。另一方面,在cpu 21确定从原稿读取操作结束时起经过的时间t短于预定时间t的情况下(在步骤s1010中为“否”),处理返回到步骤s1009。尽管在本示例性实施例中的预定时间t为60秒,但是取值不限于此。
55.根据本示例性实施例,如上所述,基于从排出托盘3取出了已经进行过图像读取的原稿d的判定,原稿托盘2旋转以从可以执行进给操作的第一状态转变为向前侧倾斜的第二状态。这使得能够在放置下一张原稿d时省去用于倾斜原稿托盘2的操作。即使在用户手持
将要进行图像读取的原稿d的情况下,用户也可以在操作图像读取装置103之前就将原稿d放置到原稿托盘2。
56.此外,根据本示例性实施例,用户可以容易地从排出托盘3取出原稿d。这是因为,原稿托盘2会保持图5所示的状态,直到从排出托盘3取出原稿d为止。更具体地,由于原稿托盘2设置在排出托盘3的上方,因此如果在从排出托盘3取出原稿d之前原稿托盘2就转变为图4中所示的向前侧倾斜的状态,则原稿托盘2会干扰用户从排出托盘3取出原稿d的动作。另一方面,根据本示例性实施例,原稿托盘2处于这样的状态:其中原稿抵接部分2b的位置被升高,直到用户从排出托盘3取出原稿d为止。这使得用户更容易从排出托盘3取出原稿d。
57.以上已经基于示例的情况描述了本示例性实施例,在所述示例的情况中,基于排出托盘3(第二堆叠单元)上不存在原稿d,原稿托盘2从能够执行进给操作的第一状态转变为向前侧倾斜的第二状态。替代地,当用户从排出托盘3取出原稿d时,原稿托盘2可以向后侧倾斜。在此情况下,基于排出托盘3上不存在原稿d,原稿托盘2从向后侧倾斜的状态转变为向前侧倾斜的状态。
58.根据本公开的配置,基于由检测单元检测到不存在排出的原稿,原稿托盘旋转,由此能够提供具有高可操作性的图像读取装置。
59.本公开的实施例还可以通过读出并执行记录在存储介质(也可以更完整地被称为“非暂时性计算机可读存储介质”)上的计算机可执行指令(例如,一个或多个程序)以执行上述一个或多个实施例的功能和/或包括用于执行上述一个或多个实施例的功能的一个或多个电路(例如,专用集成电路(asic))的系统或装置的计算机来实现,以及通过由系统或装置的计算机执行的方法来实现,例如,通过从存储介质读出并执行计算机可执行指令以执行上述一个或多个实施例的功能和/或控制一个或多个电路以执行上述一个或多个实施例的功能来实现。计算机可以包括一个或多个处理器(例如,中央处理单元(cpu),微处理单元(mpu)),并且可以包括单独的计算机或单独的处理器的网络以读出并执行计算机可执行指令。可以将计算机可执行指令提供给计算机,例如从网络或存储介质提供。存储介质可以包括例如硬盘、随机存取存储器(ram)、只读存储器(rom)、分布式计算系统的存储器、光盘(譬如高密度光盘(cd)、数字通用光盘(dvd)或蓝光光盘(bd)
tm
)、闪存装置、存储卡等中的一种或多种。
60.其他实施例
61.本发明的实施例还可以通过如下的方法来实现,即,通过网络或者各种存储介质将执行上述实施例的功能的软件(程序)提供给系统或装置,该系统或装置的计算机或是中央处理单元(cpu)、微处理单元(mpu)读出并执行程序的方法。
62.尽管已经参考示例性实施例描述了本公开,但是应当理解,本公开不限于所公开的示例性实施例。所附权利要求的范围应被赋予最广泛的解释,以便涵盖所有这样的变型以及等同的结构和功能。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。