1.本发明涉及汽车控制器技术领域,特别涉及一种控制器复位后的处理方法。
背景技术:
2.在车辆正常运行过程中,各个控制器都可能会因为软件系统或硬件系统的故障原因导致控制器复位,进而导致在控制器从发生复位至恢复到正常状态的过程中通过车载网络(can/canfd/以太网等)传送的报文信息中断,车辆表现为失去动力,整车下电,整车控制器无法得到故障信息反馈及匹配解决方案。车辆正常行驶过程中,一旦控制器发生复位,对车辆驾驶性及安全性造成很大影响,甚至威胁到驾驶人员的生命安全。
技术实现要素:
3.针对现有技术存在的问题,本发明提供了一种控制器复位后的处理方法,使用该控制器复位后的处理方法后,整车控制器正常运行后,保存某些关键参数(复位原因、ptready、巡航状态、整车上下电状态等)存入非易失性随机访问存储器中,以便整车控制器发生复位恢复后,可以鉴别复位故障发生,从而能够直接进入故障发生前的状态,不需要重新走一遍整车上电流程,并且可以有效识别整车控制器复位故障,并在整车控制器恢复后让整车控制器直接进入复位前的状态,可以保证其他控制器接收到的信号不发生跳变(特殊的,故障期间,其他控制器收不到信号,一定时间内保持上一次有效值,超出时间则取默认值),从而可以保证车辆状态在此期间不发生改变,保证车辆驾驶性基本不受影响的同时更降低了安全风险。
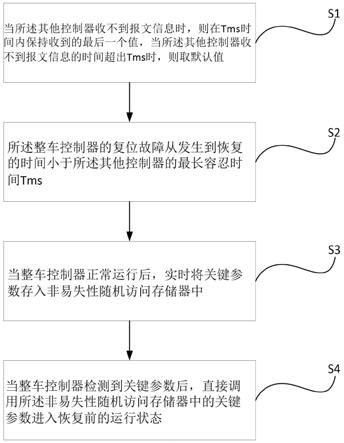
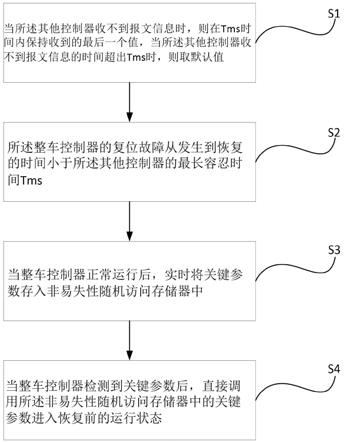
4.为解决上述技术问题,本发明采用的技术方案是:提供一种控制器复位后的处理方法,使用到整车控制器和非整车控制器的其他控制器,包括以下步骤:s1、当所述其他控制器收不到报文信息时,则在tms时间内保持收到的最后一个值,当所述其他控制器收不到报文信息的时间超出tms时,则取默认值;s2、所述整车控制器的复位故障从发生到恢复的时间小于所述其他控制器的最长容忍时间tms;s3、当整车控制器正常运行后,实时将关键参数存入非易失性随机访问存储器中;s4、当整车控制器检测到关键参数后,直接调用所述非易失性随机访问存储器中的关键参数进入恢复前的运行状态。
5.本发明为了解决其技术问题,所采用的进一步技术方案是:进一步地说,所述关键参数为复位原因、ptready、巡航状态和整车上下电状态中的至少一种。
6.进一步地说,所述其他控制器为驱动电机控制器、仪表控制器、高压转低压控制器、高压电池管理控制器、车载慢充控制器、启动充电一体机控制器和发动机控制器中的至少一种。
7.进一步地说,所述报文信息通过车载网络传送至所述其他控制器,所述车载网络为can总线、canfd总线和以太网中的至少一种。
8.进一步地说,所述整车控制器正常运行后,保存所述关键参数存入所述非易失性随机访问存储器中,用以鉴别复位故障发生。
9.进一步地说,所述整车控制器正常运行后,所述整车控制器直接进入复位前的状态,不再重新执行整车上电流程,所述其他控制器接收到的信号不发生跳变。
10.本发明的有益效果是:本发明整车控制器正常运行后,保存某些关键参数(复位原因、ptready、巡航状态、整车上下电状态等)存入非易失性随机访问存储器中,以便整车控制器发生复位恢复后,可以鉴别复位故障发生,从而能够直接进入故障发生前的状态,不需要重新走一遍整车上电流程,并且可以有效识别整车控制器复位故障,并在整车控制器恢复后让整车控制器直接进入复位前的状态,可以保证其他控制器接收到的信号不发生跳变(特殊的,故障期间,其他控制器收不到信号,一定时间内保持上一次有效值,超出时间则取默认值),从而可以保证车辆状态在此期间不发生改变,保证车辆驾驶性基本不受影响的同时更降低了安全风险。
11.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。
附图说明
12.图1是本发明所述一种控制器复位后的处理方法的流程示意图;图2是本发明控制器收不到报文的最长容忍时间示意图。
具体实施方式
13.以下通过特定的具体实施例说明本发明的具体实施方式,本领域技术人员可由本说明书所揭示的内容轻易地了解本发明的优点及功效。本发明也可以其它不同的方式予以实施,即,在不背离本发明所揭示的范畴下,能予不同的修饰与改变。
实施例
14.一种控制器复位后的处理方法,如图1和图2所示,使用到整车控制器和非整车控制器的其他控制器,其特征在于:包括以下步骤:首先,当所述其他控制器收不到报文信息时,则在tms时间内保持收到的最后一个值,当所述其他控制器收不到报文信息的时间超出tms时,则取默认值;然后,所述整车控制器的复位故障从发生到恢复的时间小于所述其他控制器的最长容忍时间tms;接着,当整车控制器正常运行后,实时将关键参数存入非易失性随机访问存储器中;最后,当整车控制器检测到关键参数后,直接调用所述非易失性随机访问存储器中的关键参数进入恢复前的运行状态。
15.所述关键参数可以为复位原因、ptready、巡航状态和整车上下电状态中的任何一
种,但并不局限于上述所列关键参数种类,此处仅为有限举例,为常见的关键参数。
16.所述其他控制器可以为驱动电机控制器、仪表控制器、高压转低压控制器、高压电池管理控制器、车载慢充控制器、启动充电一体机控制器和发动机控制器中的一种或多种,但并不局限于上述所列控制器种类,此处仅为有限举例,为常见的车载控制器。
17.所述报文信息通过车载网络传送至所述其他控制器,所述车载网络可以为can总线、canfd总线和以太网中的一种或多种,但并不局限于上述所列通信种类,此处仅为有限举例,为常见的信号通信方式。
18.所述整车控制器正常运行后,保存所述关键参数存入所述非易失性随机访问存储器中,用以鉴别复位故障发生。
19.所述整车控制器正常运行后,所述整车控制器直接进入复位前的状态,不再重新执行整车上电流程,所述其他控制器接收到的信号不发生跳变。
20.本发明的工作过程和工作原理以下:本发明为保证控制器发生复位后不影响车辆驾驶性及安全性,需要做到以下方法逻辑步骤:首先,其他控制器收不到报文信息后,需要在tms时间内保持收到的最后一个值,超出t ms则取默认值;然后,整车控制器的复位故障从发生到恢复的时间需小于其他控制器的最长容忍时间tms;接着,整车控制器正常运行后,需要实时要把关键参数(复位原因、ptready、巡航状态、整车上下电状态等)存入非易失性随机访问存储器中;最后,整车控制器检测到复位故障后,直接调用非易失性随机访问存储器中的关键参数进入恢复前的运行状态。
21.以上所述仅为本发明的实施例,并非因此以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
技术特征:
1.一种控制器复位后的处理方法,使用到整车控制器和非整车控制器的其他控制器,其特征在于:包括以下步骤:s1、当所述其他控制器收不到报文信息时,则在tms时间内保持收到的最后一个值,当所述其他控制器收不到报文信息的时间超出tms时,则取默认值;s2、所述整车控制器的复位故障从发生到恢复的时间小于所述其他控制器的最长容忍时间tms;s3、当整车控制器正常运行后,实时将关键参数存入非易失性随机访问存储器中;s4、当整车控制器检测到关键参数后,直接调用所述非易失性随机访问存储器中的关键参数进入恢复前的运行状态。2.根据权利要求1所述的一种控制器复位后的处理方法,其特征在于:所述关键参数为复位原因、ptready、巡航状态和整车上下电状态中的至少一种。3.根据权利要求1所述的一种控制器复位后的处理方法,其特征在于:所述其他控制器为驱动电机控制器、仪表控制器、高压转低压控制器、高压电池管理控制器、车载慢充控制器、启动充电一体机控制器和发动机控制器中的至少一种。4.根据权利要求1所述的一种控制器复位后的处理方法,其特征在于: 所述报文信息通过车载网络传送至所述其他控制器,所述车载网络为can总线、canfd总线和以太网中的至少一种。5.根据权利要求1所述的一种控制器复位后的处理方法,其特征在于:所述整车控制器正常运行后,保存所述关键参数存入所述非易失性随机访问存储器中,用以鉴别复位故障发生。6.根据权利要求1所述的一种控制器复位后的处理方法,其特征在于:所述整车控制器正常运行后,所述整车控制器直接进入复位前的状态,不再重新执行整车上电流程,所述其他控制器接收到的信号不发生跳变。
技术总结
本发明公开了一种控制器复位后的处理方法,使用到整车控制器和非整车控制器的其他控制器,包括以下步骤:S1、当其他控制器收不到报文信息时,则在Tms时间内保持收到的最后一个值,超出Tms时,则取默认值;S2、整车控制器的复位故障从发生到恢复的时间小于其他控制器的最长容忍时间Tms;S3、当整车控制器正常运行后,实时将关键参数存入非易失性随机访问存储器中;S4、当整车控制器检测到关键参数后,直接调用非易失性随机访问存储器中的关键参数进入恢复前的运行状态。本发明发生复位恢复后,可以鉴别复位故障发生,直接进入故障发生前的状态,不需重走一遍上电流程,有效识别整车控制器复位故障,保证车辆状态不发生改变,提高车辆驾驶性和安全性。车辆驾驶性和安全性。车辆驾驶性和安全性。
技术研发人员:黄啸 张吉军 密刚刚
受保护的技术使用者:上海伊控动力系统有限公司
技术研发日:2021.08.30
技术公布日:2021/12/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。