1.本公开的各方面总体上涉及用于在目标位置处分配的控制方法和系统。特别地,本发明的各方面涉及用于在要打印的表面上分配墨水的喷墨打印系统,以及控制这种系统以保持密度,特别是当在物体的表面上打印弯曲区域时。
背景技术:
2.现代喷墨打印系统通常包括含有多个液滴喷射装置的打印头(也称为“喷嘴”),其形成喷嘴阵列。每个喷嘴通常包括致动器,该致动器被布置为在被致动时从喷嘴喷射墨水。
3.致动器由驱动电子设备(电子驱动电路)驱动,所述驱动电子设备提供电压波形或公共驱动信号(也称为“喷射脉冲”、“打印脉冲”、“发射脉冲”),其被配置为导致墨水从喷嘴喷射。例如,致动事件在喷嘴的墨室中产生压力脉冲,其继而分配墨滴。
4.在许多应用中,驱动电子装置向许多喷嘴提供公共驱动信号,并且单独的或集成的控制器向打印头提供数据切换,从而确定在致动事件的给定实例中,哪个喷嘴要喷射墨水。与共享致动事件相关联的一组喷嘴的数据被称为“条纹数据(stripe data)”。
5.通过安排驱动信号和切换输入的协调序列,当打印头和基板相对于彼此移动时,打印头以像素阵列的形式在基板上产生图像。这适用于但不限于单遍(single
‑
pass)打印系统和扫描打印系统。用于这种经协调的致动事件序列的数据是“条纹数据(stripe data)”的一个或多个实例,被称为“条带数据(swathe data)”。
6.打印分辨率是指单位距离内打印的点数,并且间距是其倒数。例如,间距为254μm的打印点的分辨率可描述为每英寸100个点。处理方向分辨率是沿着喷嘴阵列和表面之间的相对路径的打印点间距。交叉处理分辨率是垂直于此的打印点间距。除非另有说明,否则“分辨率”表示处理方向的分辨率。
7.通常通过“编码器”,时钟或类似的同步装置将电子驱动电路与待印刷的基板位置同步,该“编码器”、时钟或类似的同步装置直接或间接监测基板和打印头的相对运动。该同步的目的是确保致动过程和基材运动将导致以所需的分辨率打印点。换句话说,编码器可用于将致动过程与打算被打印的基板位置(我们称为“目标喷射位置”)进行协调。这种同步通常适用于在平坦表面上进行的喷墨打印,在该平坦表面上所有喷嘴都以相同的速度相对于基板移动。
8.通过知道基板的相对速度并测量经过的时间,也可以使致动过程和基板的相对运动同步。这包括速度以已知或可测量的方式变化的系统。
9.但是,当使用打印头沿着弯曲路径或在弯曲表面上打印时,各个喷嘴与要打印的表面的相对速度可以变化,使得如果将一系列致动事件发送到喷嘴阵列,则最终的点图案的分辨率变化。如果不校正,在整个打印区域中,施加到表面的墨滴的密度会发生变化。这种变化导致打印图像出现不期望的缺陷。
10.校正密度的一种已知方法是执行源图像的2d线性化,以补偿形状表面上的密度误差。尽管这种方法在理论上可行,但是在实践中,不同的液滴密度会引起点增益、墨水混合
以及其他带来复杂校正问题的效果发生变化。
11.对于这些问题,除了别的以外,根据本发明的方面试图提供一种解决方案。
技术实现要素:
12.根据本发明的第一独立方面,提供了一种控制系统的方法,所述系统包括至少两个喷嘴的布置,其中,所述布置和物体的表面相对于彼此移动,每个喷嘴在所述物体的所述表面上追踪相应的路径,并且每个喷嘴被配置成沿着所述喷嘴的相应路径在实际喷射位置处喷射液滴,所述方法包括以下步骤:
13.对于由喷嘴追踪的每个路径,限定以目标间距规则地间隔开的多个目标喷射位置;
14.确定来自所述布置的任何喷嘴在所述相对移动期间沿着所述喷嘴的所述相应路径到达的最大速度;
15.将与每个目标喷射位置相关联的误差距离限定为所述目标喷射位置与最接近所述目标喷射位置的实际喷射位置之间的距离;
16.设定所述误差距离的最大值,其中,所述最大值大于零;
17.提供包括用于所述布置的致动事件序列的第一控制信号,其中,所述第一控制信号对于所述布置中的所有喷嘴是共同的,其中,所述致动事件序列对应于沿着由所述喷嘴追踪的所述路径的每个喷嘴的潜在喷射位置序列,其中,以规则间隔提供所述致动事件,选择所述间隔使得所有喷嘴的连续潜在喷射位置之间的最大距离被限制为实际喷射位置中的误差距离的最大值的两倍,其中,所述最大距离是所述间隔乘以所述最大速度;
18.对于每个喷嘴,选择所述潜在喷射位置的子集,所述潜在喷射位置是所述喷嘴的实际喷射位置的集合,其中,对于所述喷嘴的每个目标喷射位置,在所述集合中有实际喷射位置,所述实际喷射位置比所述误差距离的所述最大值更接近所述目标喷射位置;以及
19.对于所述致动事件序列中的每个致动事件,从所述布置确定喷嘴的所述子集,其中,每个喷嘴在来自所述喷嘴的实际喷射位置的集合的实际喷射位置处。
20.应当理解,通过“间隔”我们是指例如时间间隔或编码器脉冲之间的间隔。因此,“间隔”和“速度”的单位可能会根据所使用的同步方法而变化。将理解的是,所限定的误差距离和目标间距是在处理方向上。
21.在一个从属方面,误差距离的最大值小于目标间距的一半,优选地,大约为目标间距的10
‑
20%。
22.在一个从属方面,所述方法还包括以下步骤:为每个实际喷射位置提供图像数据,以及向所述至少两个喷嘴的所述布置提供第二控制信号以根据所述图像数据喷射液滴。应当理解,可以通过本领域已知的方法来实现提供图像数据。图像数据指定是否在每个实际喷射位置喷射点(例如,对于二进制图像),并且在某些情况下指定要喷射多大的点(例如,对于灰度图像)。
23.在一个从属方面中,对于具有第一最大速度和第一间隔的第一相对运来执行所述方法步骤,然后对于具有不同于所述第一最大速度的第二最大速度和不同于所述第一间隔的第二间隔的第二相对移动来重复所述方法步骤。在某些情况下,将移动分成具有不同最大速度的较小的、连续的移动(例如,连续的路径段),并且为每个移动的间隔选择相应的不
同值将是有利的。
24.在一个从属方面中,选择所述潜在喷射位置的子集的步骤包括:识别所述集合中最接近所述目标喷射位置的实际喷射位置。这在低喷嘴速度的区域中是有利的,在该区域中几个潜在喷射位置小于距所述目标喷射位置的最大误差距离。
25.替代地,技术人员将理解,我们可以选择除最接近的位置以外的其他潜在喷射位置,以便满足一些其他图像处理目标。例如,为了防止在较平坦区域中的量化伪影,通过在最大误差距离内改变实际喷射位置的选择来注入噪声可能是有利的。
26.在一个从属方面,对于由喷嘴追踪的每个路径,限定以目标间距规则地间隔开的多个目标喷射位置的步骤中:所述第一目标喷射位置的位置设置在距所述路径的起点等于所述目标间距的距离内,其中,所述距离根据随机分布在路径之间变化。路径的开始由移动开始时由喷嘴指向的位置限定。有利地,这种在目标喷射位置上的噪声注入防止了诸如在实际喷射位置上的莫尔(moir
é
)干涉之类的影响的形成。
27.在一个从属方面中,所述方法还包括提供同步元件(例如,编码器或时钟)的步骤,所述同步元件用于协调所述控制信号和所述布置相对于所述物体的所述表面的所述移动。
28.因此,本发明提供了一种方法,通过该方法,从控制信号接收到的致动事件(发射脉冲)的序列比在平坦表面上打印以产生所需的点分辨率的布置所需要的更为频繁。然后可以从该序列中为给定的致动事件选择哪个喷嘴要喷射,使得实际喷射位置与目标喷射位置的偏差不超过限定的最大误差距离。
29.喷嘴的潜在喷射位置可以被认为是点位置的阵列。有利地,本发明提供了一种方法,通过该方法,可以在物体的表面(例如,包括弯曲表面)上建立可寻址点位置的阵列,从而可以通过以不同速度移动的打印系统的喷嘴来喷射那些点位置。
30.该方法对于在以机械臂而不是线性致动器控制打印头的情况下,有利于在各种形状的弯曲表面上进行打印,或者例如在平坦表面上的弯曲路径上进行打印。
31.根据本发明的第二独立方面,一种用于布置至少两个喷嘴的控制系统,其中,所述布置和物体的表面可相对于彼此移动,每个喷嘴被配置成追踪所述物体的所述表面上的相应路径,并且被配置成沿着所述喷嘴的所述相应路径在实际喷射位置处喷射液滴,所述系统包括处理器,所述处理器被配置为:
32.对于由喷嘴追踪的每个路径,限定以目标间距规则地间隔开的多个目标喷射位置;
33.确定来自所述布置的任何喷嘴在所述相对移动期间沿着所述喷嘴的所述相应路径到达的最大速度;
34.将与每个目标喷射位置相关联的误差距离限定为所述目标喷射位置与最接近所述目标喷射位置的实际喷射位置之间的距离;
35.设定所述误差距离的最大值,其中,所述最大值大于零;
36.提供包括用于所述布置的致动事件序列的第一控制信号,其中,所述第一控制信号对于所述布置中的所有喷嘴是共同的,其中,所述致动事件序列对应于沿着由所述喷嘴追踪的所述路径的每个喷嘴的潜在喷射位置序列,其中,以规则间隔提供所述致动事件,选择所述间隔使得所有喷嘴的连续潜在喷射位置之间的最大距离被限制为实际喷射位置中的误差距离的最大值的两倍,其中,所述最大距离是所述间隔乘以所述最大速度;
37.对于每个喷嘴,选择所述潜在喷射位置的子集,所述潜在喷射位置是所述喷嘴的实际喷射位置的集合,其中,对于所述喷嘴的每个目标喷射位置,在所述集合中有实际喷射位置,所述实际喷射位置比所述误差距离的所述最大值更接近所述目标喷射位置;以及
38.对于所述致动事件序列中的每个致动事件,从所述布置确定喷嘴的所述子集,其中,每个喷嘴在来自所述喷嘴的实际喷射位置的集合的实际喷射位置处。
39.在一个从属方面,提供了一种包括根据第二独立方面所述的控制系统的打印系统。
40.将理解的是,在第一和第二独立方面中要求保护的发明构思可以在各种应用中使用,以控制在沿着弯曲路径或在形状的弯曲表面上的实际致动位置处执行动作的任何系统。例如加热元件、移动针头或触发传感器。因此,在比较示例中,提供了一种用于布置至少两个致动器的控制系统,其中,所述布置和形状的表面可相对于彼此移动,每个致动器被配置成追踪所述形状的所述表面上的相应路径,并且被配置成沿着所述致动器的所述相应路径在实际致动位置处执行动作,所述系统包括处理器,所述处理器被配置为:
41.对于由致动器追踪的每个路径,限定以目标间距规则地间隔开的多个目标致动位置;
42.确定来自所述布置的任何致动器在所述相对移动期间沿着所述致动器的所述相应路径到达的最大速度;
43.将与每个目标致动位置相关联的误差距离限定为所述目标致动位置与最接近所述目标致动位置的实际致动位置之间的距离;
44.设定所述误差距离的最大值,其中,所述最大值大于零;
45.提供包括用于所述布置的致动事件序列的第一控制信号,其中,所述第一控制信号对于所述布置中的所有致动器是共同的,其中,所述致动事件序列对应于沿着由所述致动器追踪的所述路径的每个致动器的潜在致动位置序列,其中,以规则间隔提供所述致动事件,选择所述间隔使得所有致动器的连续潜在致动位置之间的最大距离被限制为实际致动位置中的误差距离的最大值的两倍,其中,所述最大距离是所述间隔乘以所述最大速度;
46.对于每个致动器,选择所述潜在致动位置的子集,所述潜在致动位置的子集是所述致动器的实际致动位置的集合,其中,对于所述致动器的每个目标致动位置,在所述集合中有实际致动位置,所述实际致动位置比所述误差距离的所述最大值更接近所述目标喷射位置;以及
47.对于所述致动事件序列中的每个致动事件,从所述布置确定致动器的所述子集,其中,每个致动器在来自所述致动器的实际致动位置的集合的实际致动位置处。
48.在从属权利要求中提供了所有独立方面的优选特征。
附图说明
49.现在将仅通过示例的方式参考附图来描述本发明的方面,其中:
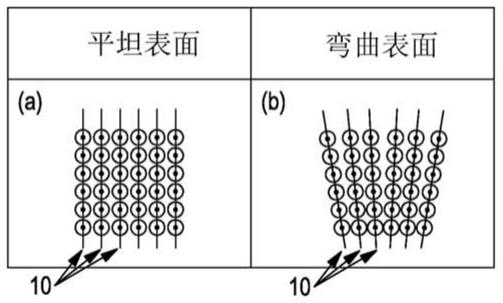
50.图1(a)是在平坦表面上喷射的点(例如,喷墨点)的示意图;
51.图1(b)是现有技术中在弯曲表面上喷射的点的示意图;
52.图2是根据本发明的方面的方法的示意图;以及
53.图3是分别根据本发明的目标喷射位置(tjl)、潜在喷射位置(pjl)和实际喷射位
置(ajl)的示意图。
具体实施方式
54.我们通过定义与本发明相关的一些概念来开始,以使能够清晰和一致的术语。然后,我们在下面的密度校正部分中描述本发明的示例性方面。
55.喷嘴布置(喷嘴阵列)
56.喷墨打印系统包含形成喷嘴布置的多个喷嘴,其共享指示何时创建致动事件的控制信号。在喷墨打印中,打印头包含形成喷嘴阵列的多个喷嘴,范围从单行喷嘴到大2d阵列。喷嘴阵列共享从驱动电子设备接收的公共驱动信号。单独的或集成的控制器向打印头提供数据切换,从而确定在致动事件的给定实例中,哪一个喷嘴要喷射墨水。
57.路径(打印路径)
[0058]“打印路径”描述喷嘴的布置相对于用于打印的表面的移动。例如,打印路径是在打印过程期间喷嘴布置和物体(形状)的相对移动。“路径”描述了要在喷嘴下经过的表面上的多个位置。确定单个喷嘴的路径在目标表面上提供喷嘴迹线的轨迹。即使喷嘴的布置是静态的并且物体移动,或者两者都移动以提供相对运动,该相对运动也是相等的。
[0059]
密度校正
[0060]
在一个示例中,已经开发了圆锥形的全高度印刷。虽然已知的过程包括校正液滴的位置,使得它们与“包裹的”源图像中的像素的位置匹配,但是仍然需要校正由于表面几何形状变化而导致的输出的密度变化,如图1所示。
[0061]
打印系统包括打印头阵列,该打印头阵列接收指示何时创建致动事件的信号,以及与共享的致动事件相关联的喷嘴组的条带数据。沿着平坦表面移动的打印头阵列的喷嘴也被称为“扁平喷嘴”。在这种情况下,每个致动事件都会产生点,这些点是流体的沉积物,诸如来自打印头驱动喷嘴的墨水在潜在喷射位置10(其中可以放置点)处规则地间隔开,从而实现目标分辨率(图1(a))。印刷点代表我们所谓的“实际喷射位置”。
[0062]
当喷嘴以与阵列中的另一“扁平”喷嘴的不同速度在弯曲的打印路径上移动时,实际喷射位置之间的距离将与扁平喷嘴所实现的距离不同,并且因此改变打印密度(如图1(b)所示)。因此,需要弯曲表面的输出的密度校正以实现通常在平坦表面的标准打印期间通常实现的密度。
[0063]
图2和图3分别示出了我们希望放置点的一连串目标喷射位置9和可能放置点的一连串潜在喷射位置10(对应于致动事件)。在图2中,潜在位置10在圆锥体的表面上。
[0064]
可以通过诸如编码器、时钟或类似设备的同步元件来控制潜在位置10处的致动事件。如图2和图3中示意性所示,通过减小间隔来调整步长以获得新的潜在喷射位置10',从该新的潜在喷射位置可以选择实际喷射位置作为潜在喷射位置的子集,以在距目标喷射位置的最大误差距离内。
[0065]
当每个喷嘴追踪其打印路径时,其实现的速度限定为每单位间隔移动的距离。对于基于编码器的系统,这将是每个编码器脉冲的距离,而对于基于时钟的系统,这将是每单位时间(例如,m/s)的距离。为了限制最大误差,有必要确定在布置中所遍及的所有喷嘴在布置与表面的相对移动期间中任何喷嘴所达到的最大速度。
[0066]
因此,根据本发明,通过在致动事件之间使用减小的间隔i来执行密度校正,同时
为任何特定事件仔细选择喷射哪个喷嘴。
[0067]
通过为系统选择足够小的间隔,可以将系统中所有喷嘴的实际喷射位置11和相应的目标喷射位置9之间的最大误差距离限制为定义的的最大误差距离。因此,本发明使得有可能实现任意接近所需点分辨率的打印点分辨率。通常,将定义的最大误差距离设置为目标间距的10%至20%。
[0068]
本发明使得有可能补偿由于共同的致动事件而导致的喷嘴布置之间的点分辨率的变化,该共同的致动事件是由于喷嘴在弯曲表面上以可变速度移动而引起的。对于本领域的技术人员将显而易见的是,相同的技术可以应用于一种或多种这样的布置,例如,应用在打印头内的一个或多个喷嘴阵列,以及应用在打印系统内的一个或多个打印头。
[0069]
这种方法的一个成本是,致动事件的频率(发射频率)和条带数据大于在给定速度下以单个分辨率致动打印头阵列中的所有喷嘴的情况。因此,所选择的间隔i代表了所实现的液滴放置精度的提高与生产率之间的权衡。
[0070]
尽管已经按照与如上所述的用于在目标位置处分配墨水的喷墨打印系统有关的示例描述了本发明,但是应当理解,这些实施例仅是说明性的。应当理解,本发明可用于控制或操作适于进行任何放置或分配的沉积系统,其将任何物体放置在目标位置处。例如,该方法可以应用于在拖曳时从拖车分配肥料或播种种子的系统。然后,当拖车在田间边缘的拐角处移动以校正所沉积种子的密度时,该方法是有利的。
[0071]
鉴于本公开,本领域技术人员将能够做出修改和替代,其被认为落入所附权利要求的范围内。本说明书中公开或示出的每个特征可以单独地或与本文中公开或示出的任何其他特征以任何适当的组合结合在本发明中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。