1.本发明涉及具有探针单元的显微镜系统和使用了该显微镜系统的试样的观察方法,该探针单元具有悬臂。
背景技术:
2.一直以来,在试样观察的领域中,使用着组合光学显微镜和扫描型探针显微镜(scanning probe microscope,spm)而得到的显微镜系统。在这样的显微镜系统中,能够先通过光学显微镜观察试样的大范围的区域,然后使用扫描型探针显微镜来详细地观察特定的区域,能够高效地进行试样的观察。此外,在通过光学显微镜的对焦来估计至试样为止的大致距离并以该距离接近试样之后对扫描型探针显微镜进行操作,由此能够迅速地使扫描型探针显微镜的焦点进行对准。
3.专利文献1公开了一种显微镜系统,该显微镜系统通过光学显微镜测量试样的高度,根据该测量结果对扫描型探针显微镜进行校正,由此通过扫描型探针显微镜高精度地测量试样的高度。
4.专利文献2公开了一种原子力显微镜系统,该原子力显微镜系统具有:观察系统,其能够对悬臂和样本的区域进行光学观察;以及头系统,其使光线朝向悬臂,获得示出悬臂的移动的从悬臂反射的光线。
5.专利文献1:日本特开2016
‑
3919号公报
6.专利文献2:日本特表2012
‑
506049号公报
7.在现有装置中,一般而言,光学显微镜的物镜(明场透镜)和包含扫描型探针显微镜的悬臂的探针单元安装在换镜转盘上。操作者先使用光学显微镜的物镜来使光学系统的焦点对准于试样,根据这时的物镜的位置得到试样的第1位置。然后,操作者使用换镜转盘来将物镜切换为探针单元,使试样向探针单元接近相当于第1位置与探针单元的悬臂的位置的差的量,由此使悬臂的位置与试样一致。通过这样的操作,能够实现扫描型探针显微镜对试样的详细观察。
8.但是,通过上述方法而得到的值不一定总是正确的值。除此之外,还存在从探针单元的观察像中寻找焦点位置的方法。在试样为镜面且平坦且周围没有作为标记的杂物时,难以找到焦点。并且,到试样的距离会因悬臂的安装方式而稍微发生变化。在这些情况下,可能会因探针单元过于接近试样而产生悬臂与试样发生碰撞那样的麻烦。
技术实现要素:
9.本发明提供一种显微镜系统,该显微镜系统通过能够调整照相机的位置,能够抑制悬臂与试样的碰撞那样的麻烦的发生。
10.本发明的显微镜系统观测试样,其中,该显微镜系统具有:探针单元,其具有对所述试样的表面进行扫描的悬臂;照相机,其能够合焦于所述试样和所述悬臂的背面;驱动
部,其为了调整所述照相机相对于所述试样的位置,对该照相机进行驱动;以及控制部,其控制所述驱动部,能够使所述照相机移动到使所述照相机的焦点对准于所述悬臂的背面的位置和使所述照相机的焦点对准于所述试样的表面的位置中的各个位置,所述控制部根据使所述照相机的位置从使该照相机的焦点对准于所述悬臂的背面的位置起移动到使该照相机的焦点对准于所述试样的表面的位置时的、所述照相机的移动距离δz’来计算从所述悬臂到所述试样的表面的距离δz。
11.在本发明的显微镜系统中,例如,所述控制部根据计算出的所述距离δz来控制所述驱动部以使所述悬臂与所述试样相对地接近。
12.在本发明的显微镜系统中,例如,所述控制部计算针对所述距离δz考虑规定的余量值而得到的比所述距离δz小的值,在控制所述驱动部使得所述悬臂与所述试样相对地接近相当于该值的量之后,对所述悬臂与所述试样之间的距离进行微调。
13.在本发明的显微镜系统中,例如,所述悬臂是光杠杆方式,通过至少1束激光来检测所述悬臂的驱动或位移。另外,悬臂也可以是自检测方式,在该情况下。不需要激光。
14.在本发明的显微镜系统中,例如,所述探针单元是构成原子力显微镜(atomic force microscope;afm)的一部分的透镜型afm单元。
15.在本发明的显微镜系统中,例如,所述显微镜系统还具有换镜转盘,该换镜转盘中能够安装所述探针单元和至少一个光学式的物镜,并且该换镜转盘能够对所述探针单元和所述物镜相互进行切换以观察所述试样。
16.在本发明的显微镜系统中,例如,在为了观察所述试样由所述换镜转盘将所述探针单元切换为所述物镜时,所述控制部取得该物镜的工作距离,并根据该工作距离和切换前的所述探针单元的所述悬臂的位置来计算应使所述物镜或所述试样移动的距离。
17.本发明是一种试样的观察方法,在该试样的观察方法中使用了显微镜系统,该显微镜系统具有探针单元,该探针单元具有悬臂,其中,该试样的观察方法具有以下工序:使照相机的焦点对准于所述悬臂的背面的工序;移动所述照相机而使所述照相机的焦点对准于所述试样的表面的工序;以及计算机根据使所述照相机的位置从使该照相机的焦点对准于所述悬臂的背面的位置起移动到使该照相机的焦点对准于所述试样的表面的位置时的、所述照相机的移动距离δz’来计算从所述悬臂到所述试样的表面的距离δz的工序。
18.本发明是一种校正方法,在具有扫描型探针显微镜和光学显微镜的显微镜系统中,校正所述光学显微镜对试样的膜厚进行测量的测量结果,该扫描型探针显微镜具有探针单元,该探针单元具有对试样的表面进行扫描的悬臂,该光学显微镜具有光学式的物镜,其中,通过所述扫描型探针显微镜和所述光学显微镜测量试样的膜厚,取得所述扫描型探针显微镜的膜厚的测量结果与所述光学显微镜的膜厚的测量结果之间的相关关系,使用所述相关关系对所述光学显微镜的膜厚的测量结果进行校正。
19.本发明是一种计算方法,在具有扫描型探针显微镜和光学显微镜的显微镜系统中,计算试样的复折射率,该扫描型探针显微镜具有探针单元,该探针单元具有对试样的表面进行扫描的悬臂,该光学显微镜具有光学式的物镜,其中,通过所述扫描型探针显微镜和所述光学显微镜测量试样的膜厚,取得所述扫描型探针显微镜的膜厚的测量结果与所述光学显微镜的膜厚的测量结果之间的相关关系,使用所述相关关系来计算所述试样的复折射率。
20.发明效果
21.根据本发明的显微镜系统,能够通过使照相机的位置移动使焦点对准于试样的表面,能够抑制悬臂与试样发生碰撞那样的麻烦。此外,能够缩短到接近完成为止的时间。
附图说明
22.图1是作为本发明的一个实施方式的显微镜系统的整体结构图。
23.图2是光杠杆方式的透镜型afm单元的放大图。
24.图3是示出一般光学系统中的透镜的成像关系的概念图。
25.图4是示出根据物镜的倍率来计算的纵向倍率的计算值和实验的实验值的曲线图。
26.图5是示出基于现有的透镜型afm单元向试样接近的接近方法的概念图,(a)示出使用明场透镜来得到试样的第1位置的处理,(b)示出求出第1位置与透镜型afm单元的悬臂的位置之间的距离δz的处理,(c)示出与(a)相同的处理,(d)示出使试样向透镜型afm单元接近了距离δz的量的处理。
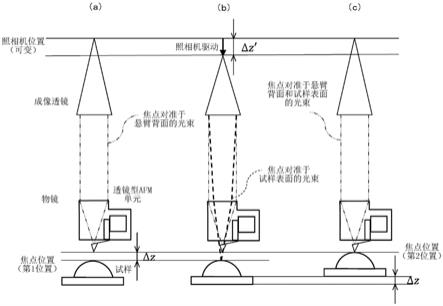
27.图6是示出基于本实施方式的透镜型afm单元向试样接近的接近方法的概念图,(a)示出将照相机的焦点位于透镜型afm单元的悬臂的背面时的照相机的位置作为照相机的原点位置记录下来的处理,(b)示出使照相机按照移动距离δz’移动并使照相机的焦点对准于试样的表面的处理,(c)示出使试样与透镜型afm单元接近距离δz的量而使焦点对准于试样的处理。
28.图7是示出执行本实施方式的显微镜系统中的照相机的位置调整时的步骤的流程图。
29.图8是说明在测量出薄膜的膜厚时,在白色干涉计测中将膜厚测量得较薄(起因于计测误差以及其他误差)的概念图。
30.图9是示出因复折射率的影响而在白色干涉计测中可能产生的计测误差的曲线图。
31.图10是针对通过白色干涉计测而计算出的薄膜的厚度与基于afm测量的厚度的关系进行描点并且示出近似曲线的曲线图。
32.图11是示出对基于白色干涉计测的高度测量的结果进行校正的步骤的流程图。
33.图12是示出用于计算薄膜的复折射率的步骤的流程图。
34.图13是示出在从探针单元向物镜切换时使试样移动到最佳位置的步骤的流程图。
35.标号说明
36.10:装置主体;11:光源;12:光学滤波器;13:分束器;14:物镜;15:照相机;16:换镜转盘;17:照相机位置微调机构(驱动部);20:工作台;30:计算机(控制部);40:探针单元;41:xy检测元件;42:z检测元件;43:悬臂;44:内置透镜;45:光位置传感器;100:显微镜系统;s:试样。
具体实施方式
37.以下,使用附图对本发明的显微镜系统的实施方式进行详细叙述。
38.图1是作为本发明的一个实施方式的显微镜系统的整体结构图。显微镜系统100包
含:装置主体10;工作台20,其供作为计测对象的试样s(测量对象物)放置;以及作为控制部的计算机(处理器)30,其负责显微镜系统100的控制,并且对所得到的数据进行处理。装置主体10包含如同轴落射照明用的白色光源那样的光源11、如根据需要而设置的波长滤波器那样的光学滤波器12、分束器13、由例如摄像元件构成的照相机(检测器)15和作为驱动照相机15的驱动部的照相机位置微调机构17。在一个例子中,工作台20除了能够在xy方向上移动之外,还能够在z方向上移动。
39.并且,在装置主体10的下端设置有由操作者手动或由计算机30自动地进行驱动的换镜转盘16。换镜转盘16是能够安装至少一个透镜、装置等的适配器,在换镜转盘16的下表面设置有能够供各种透镜、装置等安装的一个或多个孔(未图示)。在本例子中,在换镜转盘16的下表面至少安装1个光学式的物镜14和探针单元40,能够对探针单元40和物镜14彼此进行切换以观察试样s。物镜14是构成显微镜系统100中的光学显微镜的一部分功能的部件,其种类不特别限于明场透镜、干涉物镜等。
40.从光学显微镜的功能的观点出发,来自光源11的光在经由箭头a的光路而被分束器13反射后,经由箭头b的光路而向试样s发出。试样s的反射光再次经由箭头b的光路而返回,到达照相机15并成像。这里的光学显微镜是还包含共焦显微镜、干涉仪等的概念。
41.探针单元40是构成显微镜系统100中的扫描型探针显微镜(spm)的一部分功能的部件。探针单元40例如是构成作为扫描型探针显微镜中的一种的原子力显微镜(atomic force microscope;afm)的一部分的透镜型afm单元。图1中的探针单元40在其壳体的内部具有例如由压电元件构成的xy检测元件41和z检测元件42,在下表面具有悬臂43。在扫描时,悬臂43的探针(探针)与试样s的表面接触,悬臂43上下位移,xy检测元件41和z检测元件42通过将悬臂43的位移转换为电信号而检测出试样s的表面形状。图1的探针单元40是所谓的自检测方式的单元,xy检测元件41和z检测元件42能够直接检测悬臂43的位移。
42.图2示出与图1不同的光杠杆方式的探针单元40,除了xy检测元件41、z检测元件42、悬臂43以外,还具有内置透镜44、光位置传感器45(position sensitive detector,psd)。从未图示的激光光源所照射的至少1束激光l被引导至探针单元40内,通过内置透镜44照射到悬臂43的背面,被悬臂43的背面反射而引导至光位置传感器45。在此,xy检测元件41、z检测元件42与试样s的表面形状无关地控制悬臂43的挠曲量(驱动或者位移),以使照射到光位置传感器45的中心的、所反射的激光l的量为一定。因此,是由xy检测元件41、z检测元件42进行位移,并通过将该位移转换为电信号而检测出试样s的表面形状的。
43.由于具有在光学显微镜中使用的物镜14和在spm中使用的探针单元40这双方,因此本实施方式的显微镜系统100采用的是光学显微镜和spm的复合机的方式。即,本实施方式的显微镜系统100能够作为使用物镜14的光学显微镜和使用探针单元40的spm来使用。而且,在作为两个显微镜来使用时,计算机30控制照相机位置微调机构17,照相机位置微调机构17通过如图1的箭头f所示那样使照相机15的位置移动,使得照相机15的焦点分别对准于试样s和悬臂43的背面。其中,激光l的照射保持在固定于悬臂43的背面的状态,不进行移动。以下,对该控制的意义进行说明。
44.图3示出一般的光学系统中的透镜的成像关系。相当于所谓物镜的透镜倍率,表示物体与像的大小之比的横向倍率β根据物体(测量对象物)的高度y、物体的像的高度y’、拍摄距离z、送出量z’、到物镜为止的焦距f和到物镜的焦距f’,通过以下的式(1)求出。
45.[式1]
[0046][0047]
特别是在采用被称为无限远系统的光学系统的配置的情况下,β0=f’/f成立。
[0048]
另一方面,与横向倍率β正交的纵向倍率α是像的沿着光轴方向的移动量δz’与物体沿着光轴方向的移动量δz之比,通过以下的式(2)求出。物体的移动量δz、像的移动量δz’与光学系统的尺寸相比是微小的。
[0049]
[式2]
[0050][0051]
此外,当设位于物镜侧的相反侧的成像透镜(镜筒透镜)在无限远系统配置中的倍率为η0时,根据式(2)和对称关系,以下的式(3)成立。
[0052]
[式3]
[0053][0054]
像直到与照相机对准为止的移动量为δz’,这相当于为了使照相机对焦而应使照相机移动的移动量δz’。通过式(3),能够根据已知的使照相机的位置移动的移动量δz’、物镜的倍率和焦点对准于悬臂的背面时的照相机的位置来求出到物体为止的移动量即距离δz。
[0055]
另外,由于上述式(1)~(3)是以近轴光线成立那样的假定条件(sinθ≒tanθ≒θ)为前提的,因此随着物镜成为高倍率,近轴光线变得不成立。然而,一般在afm中所使用的物镜的倍率为20倍以下。
[0056]
图4示出根据物镜的倍率计算出的纵向倍率的计算值和基于实验的实验值。根据该坐标图可知,在一般设想的20倍以下的倍率的情况下,计算值与实验值的偏离较小,大致满足了近轴光线成立的条件。
[0057]
图5概念性地示出与本实施方式的显微镜系统100同样,能够使用光学显微镜和透镜型afm单元这双方的功能的现有的显微镜系统的动作,其中,在光学显微镜中作为物镜14使用了明场透镜,在扫描型探针显微镜中作为探针单元40使用了透镜型afm单元。在这样的显微镜系统中,能够先通过光学显微镜观察试样的大范围的区域,然后使用扫描型探针显微镜来详细地观察特定的区域,能够高效地进行试样的观察。此外,在通过光学显微镜的对焦估计到试样为止的大致距离并以该距离接近试样之后对扫描型探针显微镜进行操作,由此,能够迅速地使扫描型探针显微镜的焦点进行对准。
[0058]
特别是,图5概念性地示出现有的基于明场透镜和透镜型afm单元的向试样的接近和对焦的过程。在现有的显微镜系统中,未设置有本实施方式中的作为驱动部的照相机位置微调机构17,照相机的位置是固定的。
[0059]
在图5的显微镜系统中,如图5的(a)、(c)所示,操作者先使用光学显微镜的明场透镜使光学系统的焦点对准于试样,根据这时的明场透镜的位置得到试样(试样的表面)的第
1位置。然后,操作者使用换镜转盘来将明场透镜切换为透镜型afm单元。由于透镜型afm单元的悬臂的位置是已知的,因此如图5的(b)所示,必然能够求出第1位置与透镜型afm单元的悬臂的位置之间的距离δz。因此,如图5的(d)所示,操作者通过使试样向透镜型afm单元接近距离δz的量而使试样(试样的表面)移动到第2位置,使焦点对准于试样。通过这样的操作,能够实现扫描型探针显微镜对试样的详细观察。另外,在本例子中,使试样接近了透镜型afm单元,但也可以使透镜型afm单元(与装置主体)接近试样。
[0060]
但是,试样的第1位置与透镜型afm单元的位置之间的距离δz例如由于是“根据悬臂的位置绝对不会变动那样的条件估计出的”等理由,不一定总是正确的值。此外,还有从探针单元的观察像中寻找合焦的焦点位置的方法。并且,到试样为止的距离会因悬臂的安装方式而稍微发生变化。在这些情况下,例如,可能会因探针单元过于接近试样,而产生悬臂与试样发生碰撞那样的麻烦。
[0061]
另一方面,图6概念性地示出在本实施方式的显微镜系统100中,透镜型afm单元的向试样的接近和对焦的过程。在本实施方式的过程中,不使用明场透镜、换镜转盘,而专门使用照相机15和作为对照相机15进行驱动的驱动部的照相机位置微调机构17。
[0062]
如图6的(a)所示,操作者首先将照相机的焦点的位置位于透镜型afm单元的悬臂的背面时的照相机的位置记录下来以作为照相机的原点位置。此时,试样(试样的表面)位于第1位置,但与焦点没有关系,照相机的焦点未对准于试样。双点划线表示焦点对准于悬臂的背面时的光束。然后,如图6的(b)所示,操作者操作计算机30,使计算机30控制照相机位置微调机构17,照相机位置微调机构17进行驱动而使照相机15按照移动距离(移动量)δz’进行移动,使照相机15的焦点对准于试样的表面。虚线表示焦点对准于试样的表面时的光束。
[0063]
由于照相机从原点位置起所移动的移动距离δz’、物镜的倍率β0和成像透镜的倍率η0是已知的,因此能够根据式(3)求出到试样为止的距离δz。因此,如图6的(c)所示,操作者通过使试样向透镜型afm单元接近距离δz的量,使试样(试样的表面)移动到第2位置,使焦点对准于试样。双点划线表示焦点对准于悬臂的背面和试样的表面时的光束。通过这样的操作,能够实现通过扫描型探针显微镜对试样进行的详细观察。另外,在本例子中,是使试样接近了透镜型afm单元,但也可以使透镜型afm单元(与装置主体)接近试样。另外,由于移动了δz’,横向倍率β会稍微发生变化,因此也可以对光学显微镜像在xy平面内的大小进行校正。
[0064]
图7是示出执行本实施方式的显微镜系统100中的照相机的位置调整时的步骤的流程图。首先,判定探针单元40的悬臂43是图1的自检测方式、还是图2的光杠杆方式(步骤s11)。在悬臂43是光杠杆方式的情况下,操作者进行内置透镜44的位置调整以使激光l的焦点对准于悬臂43的背面(步骤s12)。
[0065]
计算机30将焦点对准于悬臂43的背面时的照相机15的位置作为原点位置记录下来(步骤s13)。这对应于图6的(a)的状态。然后,通过操作者的操作,计算机30控制照相机位置微调机构17,使得照相机位置微调机构17进行驱动而使照相机15在处于照相机可移动的范围内时移动(步骤s14)。另外,在照相机的可移动范围存在限制的情况下,有时会达到照相机的可移动范围的极限值。在达到了照相机可移动的极限值的情况下(步骤s15的“是”),操作者使包含探针单元40的装置主体10进行移动,使悬臂43以不与试样s发生碰撞的方式
接近试样s(步骤s16)。另外,也可以使试样s向探针单元侧接近。另外,此时,照相机15以能够移动的方式返回原点位置。
[0066]
计算机30判定是否已通过照相机15的移动而使照相机15的焦点对准于试样s的表面(步骤s17)。当通过反复进行步骤s14到步骤s17而使照相机15的焦点对准于试样s的表面时(图6的(b)的状态),根据这时的照相机15的位置与所记录的原点位置的差值来求出移动距离δz’(步骤s18)。然后,计算机30根据式(3)计算到试样为止的距离δz,使载置有试样s的工作台20按照距离δz的量进行移动,缩短悬臂43与试样s之间的距离,实现图6的(c)的状态(步骤s19)。
[0067]
另外,虽然在理论上,当使工作台20按照距离δz的量进行移动时,悬臂43与试样s的表面的位置会成为一致,但在实际操作中,为了防止两者突然发生碰撞,首先,使工作台20移动如下距离,该距离是针对距离δz考虑规定的余量值而得到的比距离δz小的值(例如,距离δz乘以小于1的安全系数而得到的值、或从距离δz减去与规定的安全系数对应的值而得到的值等)(粗略的调整即粗调)。在该时刻,悬臂43和试样s的表面例如接近100μm左右,之后进行微调(作为微调整的微调),由此,悬臂43与试样s的表面接近至例如能够检测出原子力(afm的情况)的nm级。微调例如能够通过使用xy检测元件41、z检测元件42等来实现。另外,在步骤s18中,也可以使包含探针单元40的装置主体10以向试样s接近的方式移动。
[0068]
在上述的过程中,作为控制部的计算机30在上述流程中执行如下的处理。计算机30控制照相机位置微调机构17而使照相机15移动,使得照相机15的焦点分别对准于悬臂43的背面和试样s的表面。然后,计算机30根据使照相机15的位置从照相机15的焦点对准于悬臂43的背面的位置起移动到照相机15的焦点对准于试样s的表面的位置的、照相机15的移动距离δz’来计算从悬臂43到试样s的表面的距离δz。然后,计算机30计算针对距离δz考虑规定的差值而得到的比距离δz小的值,在对照相机位置微调机构17进行控制而使悬臂43与试样s相对地接近相当于该值的量之后,对悬臂43与试样s之间的距离进行微调。
[0069]
在执行时,计算机30的硬件(cpu等)读入使上述处理得到执行的程序,执行使用了显微镜系统100的试样观察方法。这样的程序存储在计算机30的内部或设置于外部的存储装置(硬盘、记录介质、存储器等)中。
[0070]
另外,在上述的方法中,照相机15用于进行悬臂43与试样s彼此间的相对定位。但是,该照相机15在通过物镜14观察试样s的情况下,也可以检测来自物镜14的光。即,在图6所示的悬臂43与试样s彼此间的相对定位之后,通过驱动换镜转盘16使物镜14与试样s对置,在该状况下,照相机15能够作为光学显微镜的一部分即拍摄元件发挥功能,能够抑制部件数量的增加。
[0071]
在图5所示的现有过程中,如上所述,试样的第1位置与透镜型afm单元的位置之间的距离δz不一定总是正确的值。此外,还有从探针单元的观察像中寻找合焦的焦点位置的方法。在试样为镜面而为平坦且周围没有成为标记的杂物时,难以找到焦点。并且,到试样为止的距离会因悬臂的安装方式而发生微小变化。在这些情况下,因此,例如会产生因探针单元过于接近试样导致悬臂与试样发生碰撞那样的麻烦。
[0072]
在本实施方式中,除了作为探针单元的透镜型afm单元以外,不使用明场透镜(物镜)。取而代之在本实施方式中,通过使照相机的位置移动来使焦点对准于试样的表面。由
于在照相机的位置调整中悬臂与试样不会相对接近,因此能够防止悬臂与试样发生碰撞那样的麻烦。此外,在现有技术中,由于在探针单元向试样接近时,必须使粗调马达移动多次,因此在多数情况下操作要花费时间,但根据本实施方式,能够缩短至接近完成为止的时间。因此,安全性提高,并且能够进行高速动作。
[0073]
此外,在现有处理中,当使固定式的照相机的焦点对准于悬臂的背面时,焦点未对准于试样的表面。特别是光杠杆方式的透镜型afm单元内所组装的小型透镜(较小的物镜)被调整成对悬臂的背面进行照射,因此无法移动。因此,要在换镜转盘上安装另一个明场透镜(物镜),依靠该明场透镜掌握到试样为止的距离而进行接近,因此换镜转盘中的单元的安装部必然会被明场透镜占用。此外,接近也要花费时间。
[0074]
对于使用明场透镜的共焦显微镜,该问题不会成为特别大的问题,但对于白色干涉显微镜,所能够使用的透镜的片数减少,无法最大限度地运用换镜转盘的特点。
[0075]
在本实施方式中,由于设置有能够调整照相机的位置的驱动部,从而不需要明场透镜,因此能够削减成本,能够将附加价值更高的物镜(例如,倍率不同的干涉物镜等)安装在换镜转盘上。
[0076]
此外,现有的探针单元在内部内置了作为压电元件的粗调的z检测元件,因此必然地存在单元大幅变重的倾向。此外,存在因使用使可移动范围增大的层叠型压电元件而使微小区域中的z分辨率下降的课题。
[0077]
在本实施方式中,设置有能够调整照相机的位置的驱动部,能够实现探针单元的轻量化。
[0078]
此外,在现有过程中,一般要使换镜转盘旋转,因此,有可能使视场的中心位置偏离相当于同心圆的机械公差的量,但在本实施方式中,不会产生这样的担忧。
[0079]
另外,xy检测元件41、z检测元件42等压电元件能够设置于试样s侧(工作台20),也能够设置于探针单元40侧。
[0080]
本实施方式的探针单元40是构成广义的扫描型探针显微镜(scanning probe microscope;spm)的一部分的单元,在实施方式中是作为其中一种的扫描型隧道显微镜(scanning tunneling microscope,stm)的一部分即透镜型afm单元。但是,探针单元40也能够应用于磁力显微镜(magnetic force microscope,mfm)、静电力显微镜(electrostatic force microscope,efm)、原子力显微镜(atomic force microscope,afm)等其他扫描型探针显微镜。
[0081]
接着,对使用本实施方式那样的显微镜系统100计测电介质膜上的金属膜厚的方法进行说明。如上所述,本实施方式的显微镜系统100采用了光学显微镜和spm的复合机的方式。基于光学显微镜的测量与spm相比能够以短时间进行测量,但是一直以来,在基于光学显微镜、例如白色干涉显微镜那样进行使用了光的高度计测(白色干涉计测)的光学显微镜(三维计测显微镜)的计测中,已知电介质膜上的金属膜厚由于金属的复折射率而被计测得比实际的膜厚薄的情况。
[0082]
如图8所示,在光从折射率为n0和消光系数为k0的介质垂直入射到折射率为n1和消光系数为k1的介质时,由反射引起的相位变化通过下式给出。
[0083]
[式4]
[0084][0085]
而且,从复折射率(n1,k1)的试样1反射的光与从复折射率(n2,k2)的试样2反射的光的相位差通过以下的式(5)求出。
[0086]
[式5]
[0087][0088]
而且,在能够假定为试样1的消光系数k1=0时、即在试样1为电介质(例如玻璃基板)的情况下,以下的式(6)成立。
[0089]
[式6]
[0090][0091]
在电介质上成膜出的金属的膜厚因该相位差δφ而被计测得比实际的膜厚小。实际的膜厚与所计测的膜厚之差即计测误差δh通过以下的式(7)求出。
[0092]
[式7]
[0093][0094]
在图9中,在使用白色干涉显微镜作为光学显微镜来测量出被测量试样(试样2)的膜厚时,在折射率为n2且消光系数为k2且假定基板的玻璃(电介质)的复折射率的虚数部分为0并且能够忽视来自被测量试样的背面的反射即试样1的厚度较厚的前提下,示出所产生的膜厚的计测误差δh的计算结果。即,在白色干涉计测中,折射率n2越小,则计测误差δh(的绝对值)越大、即所计测的膜厚与实际的膜厚之差越大。
[0095]
如果消光系数k2不变而恒定,则计测误差δh的校正较容易。但是,膜越薄,因以背面反射为代表的各种原因所带来的影响就越大。此外,特别是在通过白色干涉显微镜进行计测的情况下,不是基于激光的单一波长进行计测,因此每个波长的消光系数k2相对于波长也不一定是固定的。
[0096]
图10是对通过扫描型白色干涉显微镜的白色干涉计测(csi,coherence scanning interferometry)而测量出的薄膜的膜厚、和通过使用了透镜型afm单元的测量(基于afm的测量)而测量出的薄膜的膜厚进行描点而得到的图。虚线l10是csi和afm中的计测结果一致时的理想线,斜率是1。实线l11是与虚线l10平行(斜率是1)、且截距是由式(7)确定的值、并且使理想的线l10偏移了作为截距的计测误差δh而得到的实线。
[0097]
另一方面,点划线l12是反映了实际的薄膜的状况的线,由于斜率不是1,因此没有如实线l11那样从虚线l10偏移相当于截距的量。即,虽然计测误差δh不固定,但难以认为薄膜的折射率n2发生了变化,因此根据式(4)~(7),意味着消光系数k2根据薄膜的厚度而发生变化。这样的消光系数k2的变化可以假定为线性或指数函数(朗伯
‑
比尔定律),在这样的假定下进行近似得到的近似曲线(拟合曲线)是虚线l13。在白色干涉计测、特别是薄膜计测的情况下,受到复折射率、背面反射等影响,并且在衍射极限处的空间方向上作用有低通滤
波器,峰值减小,因此,示出了测量出比基于afm的测量薄的膜厚的结果。
[0098]
因此,在现实中,优选按照每个试样(每次试样的厚度不同)、即按照复折射率不同的每个试样进行白色干涉计测和afm测量并取得将表示它们之间的相关关系的相关数据汇总为一览的相关表(查找表),然后进行高度校正(膜厚校正)。图11示出使用本实施方式的显微镜系统100来对基于白色干涉计测的高度测量的结果进行校正的步骤。
[0099]
首先,操作者在显微镜系统100中设置试样(步骤s21)。在所设置的试样是目前为止未测量过的新试样的情况、和/或即使是已测量过的试样、但在所关注的范围的高度方面不存在试样的相关数据(所关注的范围的厚度的相关数据)的情况下(步骤s22;否),需要取得相关数据。因此,操作者操作显微镜系统100的计算机30,使用白色干涉显微镜和透镜型afm单元来进行试样的高度测量(膜厚测量)(步骤s23)。基于白色干涉显微镜的测量是使用了物镜14的白色干涉计测,基于透镜型afm单元的测量是如上述实施方式那样作为探针单元40使用了透镜型afm单元的afm测量。
[0100]
并且,根据该高度测量的测量结果取得白色干涉计测与afm测量之间的相关关系(相关表)、具体而言是图10所示的近似曲线(步骤s24)。经过步骤s23、步骤s24,计算机30使用该相关关系对白色干涉计测中的高度测量的结果进行校正,排除因复折射率等产生的影响(步骤s25)。计算机30在经过步骤s23、步骤s24之后,按照试样的每个种类将相关关系预先保存到未图示的存储器、存储装置等中,由此,在接下来对同种试样进行白色干涉计测时,能够使用所保存的相关关系来进行校正,并迅速地计算准确的膜厚。当然,也可以在每次观测中,实施步骤s23、步骤s24而重新得到相关关系。
[0101]
即,能够根据通过共焦显微镜、白色干涉显微镜等光学显微镜(三维计测显微镜)而得到的高度的值和通过透镜型afm单元而得到的高度的结果来对以光学式得到的高度进行校正(校准)。如上所述,afm测量与基于光学显微镜的计测相比,可期待能够在不产生计测误差δh的前提下高精度地测量出膜厚,但与基于光学显微镜的计测相比,测量是要花费时间的。因此,通过图11的处理,按照每个试样预先取得afm测量与光学显微镜计测之间的相关关系,根据该相关关系来对光学显微镜计测的测量结果进行校正,由此能够迅速地得到比较准确的膜厚。
[0102]
上述内容是一种校正方法,在具有扫描型探针显微镜和光学显微镜的显微镜系统中,对基于光学显微镜的试样的膜厚的测量结果进行校正,该扫描型探针显微镜具有探针单元,该探针单元具有对试样的表面进行扫描的悬臂,该光学显微镜具有光学式的物镜。能够通过扫描型探针显微镜和光学显微镜测量试样的膜厚,取得扫描型探针显微镜的膜厚的测量结果与光学显微镜的膜厚的测量结果之间的相关关系(例如图10中记载的相关关系),并使用相关关系对光学显微镜的膜厚的测量结果进行校正。
[0103]
此外,除了高度的校正以外,还可以根据图10的测量结果的近似曲线来求出测量试样的复折射率(n2,k2)。一般而言,n0、k0是空气,而且n1、k1是例如可无视k1的玻璃基板等。如果已知试样2的复折射率,则拟合较容易,但即使在未知的情况下,变量的数量也是n2、k2这2个,根据图10的实验结果,能够得到l11和l12这2条线、即相当于方程式,因此能够求出复折射率(n2,k2)。但是,要注意如下方面:薄膜中的消光系数k2的变化方式被假定为线性或指数函数。
[0104]
图12示出用于根据使用实施方式的显微镜系统100而得到的结果来计算薄膜的复
折射率的步骤。首先,操作者在显微镜系统100中设置试样(步骤s31)。接着,通过白色干涉计测和afm测量进行试样的高度测量(步骤s32)。然后,根据高度测量的测量结果来取得白色干涉计测与afm测量之间的相关关系、近似曲线(步骤s33)。根据测量结果和近似曲线来得到薄膜中的复折射率(n2,k2)(步骤s34)。
[0105]
即,能够根据通过光学显微镜(例如,共焦显微镜、白色干涉显微镜等)而得到的高度的值和通过透镜型afm而得到的高度的结果来计算薄膜试样的复折射率(n,k)。能够使用基于光学显微镜的计测的测量结果来迅速地得到复折射率(n,k)。
[0106]
上述内容是一种计算方法,在具有扫描型探针显微镜和光学显微镜的显微镜系统中,计算试样的复折射率,该扫描型探针显微镜具有探针单元,该探针单元具有对试样的表面进行扫描的悬臂,该光学显微镜具有光学式的物镜。能够通过扫描型探针显微镜和光学显微镜测量试样的膜厚,取得扫描型探针显微镜的膜厚的测量结果与光学显微镜的膜厚的测量结果之间的相关关系(例如图10中记载的相关关系),并使用相关关系来计算试样的复折射率。
[0107]
在图10的反映了实际的薄膜状况的点划线l12中,相当于截距的计测误差δh从afm测量中的32nm附近起向0nm减少。如果以图9中的折射率n2=1.5的曲线为例,则该现象相当于虚线的部分。如上所述,由于难以认为薄膜的折射率会发生变化,因此能够假定为消光系数k2根据线性或指数函数(朗伯
‑
比尔定律)而发生变化,消光系数k2随着计测误差δh的减少而减少。并且,能够根据图10的相关关系,使用图9、特别是作为其基础的式(4)~(7)来求出复折射率(n2,k2)。
[0108]
接着,对在进行使用了探针单元40的spm测量(例如使用了透镜型afm单元的afm测量)之后使用换镜转盘16来切换为光学式的物镜14时可能产生的问题及其解决方法进行叙述。如上所述,本实施方式的显微镜系统100采用了光学显微镜和spm的复合机的方式。作为典型利用方式,通过光学显微镜观察试样的大范围的区域、然后使用spm来实施详细地观察特定区域的处理,但相反地,在使用spm来详细地观察特定的区域之后、再次通过光学显微镜观察试样的大范围的区域的情况也较多,在该情况下,对换镜转盘16进行驱动而进行从探针单元40向物镜14的切换。
[0109]
探针单元40的悬臂43的前端与试样s之间的距离在进行粗调而接近之后为例如0.1~0.5mm左右,在之后的微调(即、微调接近)测量时,例如可能达到几埃~几nm左右的微小值。另一方面,在使用物镜14进行观察的情况下,无限远配置时的工作距离(wd)作为设计值被给出,根据透镜的不同而在几mm~几十mm之间不等。另外,wd是指“从物镜14的前端到试样表面的距离”,wd也由于照相机位置改变而依照式(1)~(3)发生变化。
[0110]
这样,在使用探针单元40的测量和使用物镜14的测量中,相对于试样s的距离采用了完全不同的范围。此外,在从探针单元40切换为物镜14时,还会伴随有工作台20、装置主体10的移动,因此,经常发生即使在切换之前机械地保持了同焦但像还是会因公差而模糊的情况。此外,wd可能根据各个透镜而不同。因此,在使换镜转盘16进行驱动的情况下,必须以与每个透镜的wd一致的方式决定物镜14与试样之间的相对距离。
[0111]
因此,在本实施方式的显微镜系统100中,预先取得如下信息:与通过使照相机15上下移动而使悬臂43进行接近(图7的处理)时所得到的与试样s的位置相关的试样位置信息、和接下来被使用的物镜14的wd、即与合焦对应的从物镜14到试样s的最佳距离的信息。
然后,计算在切换为物镜14时应使试样s上下移动的距离,使试样s的位置按照包含计算出的校正值的距离上下移动。另外,此处的“试样位置”可以是试样s的绝对位置,也可以是以换镜转盘16的特定的点(基准点)为基准的相对位置。因此,在试样位置的上下移动时,可以进行试样s(工作台20)的移动,也可以使包含换镜转盘16等的装置主体10移动。通过这样的处理,即使在换镜转盘旋转时,也能够迅速且简便地决定物镜14与试样之间的相对距离,使得该相对距离与焦点对准于试样s时的wd一致。
[0112]
图13示出在从探针单元40向物镜切换时使试样s移动到最佳位置的步骤。首先,计算机30计算当前的试样s在显微镜系统100中的位置(步骤s41)。在此,以使用探针单元40进行了测量为前提。接着,计算机30根据切换时是否存在输入信号等来判定换镜转盘16是否被进行了驱动(步骤s42)。在换镜转盘16被进行了驱动的情况下,计算机30取得切换后被使用的物镜14的wd(步骤s43)。然后,计算机30根据该wd和切换前的探针单元40的悬臂43的位置来计算应使试样s移动的距离(步骤s44),对工作台20进行驱动而使试样s移动(步骤s45)。在步骤s44、s45中,也可以计算应使包含物镜14、换镜转盘16的装置主体10接近试样s的距离并使其接近。即,计算机30根据物镜14的wd和切换前的探针单元40的悬臂43的位置来计算应使物镜14或试样s移动的距离。
[0113]
关于在换镜转盘16的哪个孔(设置部)中安装有怎样的物镜14或探针单元40优选是已知的。但是,也可以每次由用户输入关于物镜14、探针单元40的安装位置、它们的种类等的信息。
[0114]
各物镜14的wd(或者能够计算wd的信息)优选是已知的。但是,也可以由用户每次输入。
[0115]
此外,在图13的步骤之前,需要至少一次通过照相机15的上下移动预先得到与试样s的位置相关的信息。只要得到信息,在之后就能够通过加上或减去使试样s上下移动的距离来计算当前的试样位置。通过预先得到试样s的位置信息,不仅是在从探针单元40向物镜14的切换时,在从一个物镜向其他物镜切换时也能够使用本方法。
[0116]
另外,齐焦距离(parfocal distance)被标准化成即使在使换镜转盘16进行驱动而切换为无限远配置时的wd不同的另一透镜的情况下,试样s的像也不会模糊。因此,在切换物镜时,原本是不需要使试样位置上下移动。但是,也存在使用不符合规格的装置或部件的情况、或即使符合标准而试样s的像也因公差等的影响而模糊的情况。因此,在切换物镜时,也能够使用上述方法来使试样位置上下移动。
[0117]
此外,存在设置有使换镜转盘16进行驱动的驱动装置(马达等)的情况。驱动装置能够根据用户经由接口对换镜转盘16发出的驱动指令或所存储的观察流程来自动地使换镜转盘16进行驱动而变更使用的透镜。
[0118]
优选的是,优选设置对当前在换镜转盘16中使用的孔(设置部)、所使用的物镜14或探针单元40的种类进行检测的传感器或对换镜转盘16的(特别是基于手动的)驱动进行检测的传感器。能够通过传感器来决定应开始wd的优化的定时。此外,还能够通过传感器使最佳的wd计算自动化。
[0119]
此外,也可以在换镜转盘16的驱动之前,执行试样s的缩进处理以防止碰撞。例如,计算机30使用显示器或扬声器向用户发出提醒进行缩进处理的信号。在该情况下,在使试样位置上下移动的距离的计算处理中,考虑基于缩回处理的移动距离。
[0120]
并且,也可以在判定出使用的物镜14的种类以后的任意定时,执行使照相机15的位置上下移动到适于明场观察的位置的处理。
[0121]
另外,本发明不限定于上述实施方式,能够适当地进行变形、改良等。另外,上述实施方式的各构成要素的材质、形状、尺寸、数值、方式、数量、配置部位等只要能够实现本发明,则是任意的,并没有限定。
[0122]
产业上的可利用性
[0123]
根据本发明的显微镜系统,可提供一种能够抑制悬臂与试样发生碰撞那样的麻烦、使安全性提高并且能够进行高速动作的显微镜系统。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。