1.本发明涉及骨科技术领域,尤其涉及一种电动骨膜和骨复合体移植套件及使用方法。
背景技术:
2.骨软骨损伤一直以来是困扰运动医学的难题。骨膜
‑
骨复合体移植凭借其安全、经济、可行性高、并发症少等优势,近年来在国内外受到广泛关注。依靠骨膜的成软骨特性以及骨膜与骨之间天然的稳定性,骨膜
‑
骨复合体移植能够同时修复软骨以及软骨下骨病变,特别适用于伴有囊性变的距骨骨软骨损伤。目前已有研究表明,该手术中长期临床疗效确切,术后患者显著受益。
3.但是采用该手术方式修复骨软骨损伤成功的关键在于术中的两个核心问题:其一是获取完整的骨膜
‑
骨复合体,最大程度保留骨膜在组织结构上的完整性以及骨膜与骨内在的机械稳定性,降低移植术后骨膜发生剥离、脱落可能性,消除骨膜与骨之间的二次愈合,从而确保骨膜正常发挥成软骨功能。其二是植入的过程需确保移植物与受区骨槽精准匹配、紧密贴合,消除因移植物与骨槽因匹配不佳产生的“死腔”,防止因贴合不稳导致的移植物松动,确保移植物与骨槽的一期愈合,从而避免移植术后复发囊性变。而现有的取/移植工具并不能很好的解决这两个核心问题。
技术实现要素:
4.本发明的目的在于提供一种电动骨膜和骨复合体移植套件及使用方法,保证手术中能够顺利获取完整的骨膜
‑
骨复合体,减少移植后骨膜发生剥离、脱落可能性,消除骨膜与骨之间的二次愈合,从而确保骨膜正常发挥成软骨功能。此外,通过本发明保证获取和植入移植物过程的精准化控制、实现手术流程标准化。降低因移植物与骨槽匹配不佳和贴合不牢导致的并发症的可能和因操作不规范引发的手术失败率。
5.为实现上述目的,本发明采用的一种电动骨膜和骨复合体移植套件,包括移植物工具、植入工具和t型可视取/植骨套筒,所述移植物工具包括中心定位电动骨膜刀和中心定位电动环锯,所述中心定位电动骨膜刀包括空心骨膜刀和第一中空圆形金属杆,所述空心骨膜刀与所述第一中空圆形金属杆固定连接,所述空心骨膜刀远离所述第一中空圆形金属杆的一端为第一刀口,且所述第一刀口为平口结构,所述第一中空圆形金属杆远离所述空心骨膜刀的一端连接电钻,所述中心定位电动环锯包括中空环锯和第二中空圆形金属杆,所述中空环锯与所述第二中空圆形金属杆固定连接,所述中空环锯远离所述第二中空圆形金属杆的一端为第二刀口,所述第二刀口为锯齿结构,所述第二中空圆形金属杆远离所述中空环锯的一端连接电钻;
6.所述植入工具包括软头推骨棒和植骨棒,所述软头推骨棒包括推骨棒、软头、第三金属杆和第一手持握柄,所述推骨棒的前端与所述软头固定连接,所述推骨棒的后端与所述第三金属杆的一端固定连接,所述第三金属杆的另一端与所述第一手持握柄固定连接,
所述植骨棒包括第四金属杆和第二手持握柄,所述第四金属杆的与所述第二手持握柄固定连接;
7.所述t型可视取/植骨套筒包括筒体和t型手柄,所述筒体为中空管状结构,所述筒体的头端具有第三刀口,所述第三刀口为锯齿状,所述筒体的尾端与所述t型手柄固定连接。
8.其中,所述空心骨膜刀为中空管状结构设置,所述空心骨膜刀的长度为10mm,所述空心骨膜刀的内径范围为7
‑
15mm,所述空心骨膜刀的管壁为1mm。
9.其中,所述第一中空圆形金属杆的长度为100mm,所述第一中空圆形金属杆的直径为6mm,所述第一中空圆形金属杆的中心孔直径为2mm。
10.其中,所述中空环锯的长度为20mm,所述中空环锯的内径范围为7
‑
15mm,所述中空环锯的管壁为1mm,所述中空环锯的外壁标尺为0
‑
20mm。
11.其中,所述第二中空圆形金属杆的长度为100mm,所述第二中空圆形金属杆的直径为6mm,所述第二中空圆形金属杆的中心孔的直径为2mm。
12.其中,所述筒体为中空管状结构设置,所述筒体的内径范围为7
‑
15mm,所述筒体的长度为100mm,所述筒体的管壁为1mm,所述第三刀口的上方5mm处开设有窗口,所述窗口的长度为15mm,所述窗口的宽度为2mm。
13.其中,所述推骨棒的直径范围为6
‑
14mm,所述第三金属杆的长度为101mm。
14.其中,所述第四金属杆的直径为6
‑
14mm,所述第四金属杆的长度为100mm,所述第四金属杆的标尺范围为0
‑
25mm,所述第四金属杆远离所述第二手持握柄的一端为标尺起点。
15.本发明还提出一种如上述所述的电动骨膜和骨复合体移植套件的使用方法,包括如下步骤:
16.使用前在供区打入1mm克氏针,插入所述中心定位电动骨膜刀,利用克氏针固定中心定位骨膜刀,连接电钻,切取骨膜、骨皮骨复合体,深度为5mm;
17.之后退出所述中心定位电动骨膜刀,沿克氏针插入直径相同的所述中心定位电动环锯,钻入皮/松质骨至理想深度;
18.之后退出所述中心定位电动环锯,退出克氏针,沿所述中心定位电动环锯的切割轨道插入相同直径的所述t型可视取/植骨套筒,通过所述窗口确认移植物深度,前后左右摇晃t型可视取/植骨套筒,获得理想深度的骨膜
‑
骨复合体移植物;通过所述窗口观察骨膜
‑
骨复合体移植物断端位置,若断端位于t型可视取/植骨套筒口上方,则自所述t型可视取/植骨套筒尾端插入较其直径小1mm的所述软头推骨棒,适当敲击软头推骨棒,将骨膜
‑
骨复合体移植物断端至与t型可视取/植骨套筒口齐平位置;
19.根据病变的大小、深度在病变区域钻取对应尺寸骨槽以彻底清除病灶;
20.通过观察所述窗口确认移植物的长度,采用所述植骨棒对骨槽植入适量异体骨,敲击所述第二手持握柄,压实骨槽下方骨床,通过所述植骨棒外壁的标尺测量骨槽深度,确保骨槽深度比所述t型可视取/植骨套筒内的移植物低1mm,完成植入前准备;
21.之后将嵌有移植物的所述t型可视取/植骨套筒插入骨槽,通过所述窗口确认移植物埋入骨槽,其表面稍高于骨槽周围软骨面,自所述t型可视取/植骨套筒尾端插入较其直径小1mm的所述软头推骨棒以固定移植物,而后反向敲击所述t型手柄,退出所述t型可视
取/植骨套筒,所述推骨棒敲击移植物表面至低于周围正常软骨1mm位置后完成植入过程。
22.本发明的一种电动骨膜和骨复合体移植套件及使用方法,使用前在供区打入1mm克氏针,插入所述中心定位电动骨膜刀,利用克氏针固定中心定位骨膜刀,连接电钻,切取骨膜、骨皮骨复合体,深度为5mm;之后退出所述中心定位电动骨膜刀,沿克氏针插入直径相同的所述中心定位电动环锯,钻入皮/松质骨至理想深度;之后退出所述中心定位电动环锯,退出克氏针,沿所述中心定位电动环锯的切割轨道插入相同直径的所述t型可视取/植骨套筒,通过所述窗口确认移植物深度,前后左右摇晃t型可视取/植骨套筒,获得理想深度的骨膜
‑
骨复合体移植物;在病变区域钻取骨槽,观察所述t型可视取/植骨套筒内的移植物的位置,保持移植物的下方与视取/植骨套筒头端齐平;通过观察所述窗口确认移植物的长度,采用所述植骨棒对骨槽植入适量异体骨,敲击所述第二手持握柄,压实骨槽下方骨床,通过所述植骨棒外壁的标尺测量骨槽深度,确保骨槽深度比所述t型可视取/植骨套筒内的移植物低1mm,完成植入前准备;之后将嵌有移植物的所述t型可视取/植骨套筒插入骨槽,通过所述窗口确认移植物埋入骨槽,其表面稍高于骨槽周围软骨面,所述软头推骨棒插入所述t型可视取/植骨套筒,压实移植物后反向敲击所述t型手柄,退出所述t型可视取/植骨套筒,完成植入过程。以此能够获取完整的骨膜骨复合体,从而保证移植后骨膜不发生脱落,另外在植入的过程需确保移植物与受区骨槽紧密贴合,最大程度避免术后复发囊性变。
附图说明
23.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
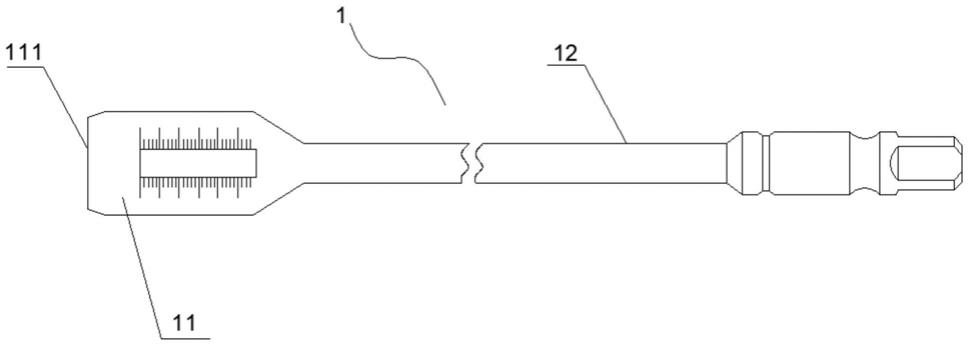
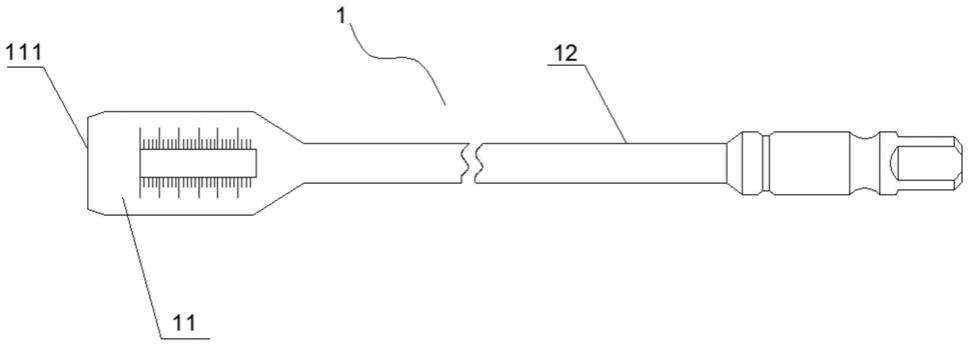
24.图1是本发明的中心定位电动骨膜刀的结构示意图。
25.图2是本发明的中心定位电动环锯的结构示意图。
26.图3是本发明的t型可视取/植骨套筒的结构示意图。
27.图4是本发明的软头推骨棒的结构示意图。
28.图5是本发明的植骨棒的结构示意图。
29.图6是本发明的t型手柄的结构示意图。
30.图7是本发明的电动骨膜和骨复合体的使用方法的步骤流程图。
31.图8是本发明的获得骨膜
‑
骨复合体移植物的原理图。
32.图9是本发明的植入骨膜
‑
骨复合体的原理图。
[0033]1‑
中心定位电动骨膜刀、11
‑
空心骨膜刀、111
‑
第一刀口、12
‑
第一中空圆形金属杆、2
‑
中心定位电动环锯、21
‑
中空环锯、22
‑
第二中空圆形金属杆、221
‑
第二刀口、3
‑
软头推骨棒、31
‑
推骨棒、32
‑
软头、33
‑
第三金属杆、34
‑
第一手持握柄、4
‑
植骨棒、41
‑
第四金属杆、42
‑
第二手持握柄、5
‑
t型可视取/植骨套筒、51
‑
筒体、511
‑
第三刀口、512
‑
窗口、52
‑
t型手柄。
具体实施方式
[0034]
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终
相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
[0035]
在本发明的描述中,需要理解的是,术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0036]
请参阅图1至图6,本发明提供了一种电动骨膜和骨复合体移植套件,包括移植物工具、植入工具和t型可视取/植骨套筒5,所述移植物工具包括中心定位电动骨膜刀1和中心定位电动环锯2,所述中心定位电动骨膜刀1包括空心骨膜刀11和第一中空圆形金属杆12,所述空心骨膜刀11与所述第一中空圆形金属杆12固定连接,所述空心骨膜刀11远离所述第一中空圆形金属杆12的一端为第一刀口111,且所述第一刀口111为平口结构,所述第一中空圆形金属杆12远离所述空心骨膜刀11的一端连接电钻,所述中心定位电动环锯2包括中空环锯21和第二中空圆形金属杆22,所述中空环锯21与所述第二中空圆形金属杆22固定连接,所述中空环锯21远离所述第二中空圆形金属杆22的一端为第二刀口221,所述第二刀口221为锯齿结构,所述第二中空圆形金属杆22远离所述中空环锯21的一端连接电钻;
[0037]
所述植入工具包括软头推骨棒3和植骨棒4,所述软头推骨棒3包括推骨棒31、软头32、第三金属杆33和第一手持握柄34,所述推骨棒31的前端与所述软头32固定连接,所述推骨棒31的后端与所述第三金属杆33的一端固定连接,所述第三金属杆33的另一端与所述第一手持握柄34固定连接,所述植骨棒4包括第四金属杆41和第二手持握柄42,所述第四金属杆41的与所述第二手持握柄42固定连接;
[0038]
所述t型可视取/植骨套筒5包括筒体51和t型手柄52,所述筒体51为中空管状结构,所述筒体51的头端具有第三刀口511,所述第三刀口511为锯齿状,所述筒体51的尾端与所述t型手柄52固定连接。
[0039]
所述空心骨膜刀11为中空管状结构设置,所述空心骨膜刀11的长度为10mm,所述空心骨膜刀11的内径范围为7
‑
15mm,所述空心骨膜刀11的管壁为1mm。
[0040]
所述第一中空圆形金属杆12的长度为100mm,所述第一中空圆形金属杆12的直径为6mm,所述第一中空圆形金属杆12的中心孔直径为2mm。
[0041]
所述中空环锯21的长度为20mm,所述中空环锯21的内径范围为7
‑
15mm,所述中空环锯21的管壁为1mm,所述中空环锯21的外壁标尺为0
‑
20mm。
[0042]
所述第二中空圆形金属杆22的长度为100mm,所述第二中空圆形金属杆22的直径为6mm,所述第二中空圆形金属杆22的中心孔的直径为2mm。
[0043]
所述筒体51为中空管状结构设置,所述筒体51的内径范围为7
‑
15mm,所述筒体51的长度为100mm,所述筒体51的管壁为1mm,所述第三刀口511的上方5mm处开设有窗口512,所述窗口512的长度为15mm,所述窗口512的宽度为2mm。
[0044]
所述推骨棒31的直径范围为6
‑
14mm,所述第三金属杆33的长度为101mm。
[0045]
所述第四金属杆41的直径为6
‑
14mm,所述第四金属杆41的长度为100mm,所述第四金属杆41的标尺范围为0
‑
25mm,所述第四金属杆41远离所述第二手持握柄42的一端为标尺起点。
[0046]
所述软头32采用聚亚苯基砜树脂(ppsu)制成,其长度为10mm。
[0047]
所述窗口512呈沿所述筒体51的长度方向纵向设置。
[0048]
所述第三金属杆33的直径与所述软头32的直径相同。
[0049]
所述第一中空圆形金属杆12远离所述空心骨膜刀11的一端为防滑设计,所述第二中空圆形金属杆22远离所述中空环锯21的一端同样为防滑设计。
[0050]
在本实施方式中,由于现有技术中获取移植物:获取骨膜
‑
骨复合体移植物需要使用骨锤敲击骨膜刀切取骨膜、骨皮骨复合体,然后退出骨膜刀使用与骨膜刀直径相同的环锯手动钻取完整的骨膜
‑
骨复合体。现有的手动骨膜刀在使用过程中有两个问题:一、术中仅靠术者通过双手把持,缺乏可靠的固定方式,敲击骨膜刀容易移位,导致的骨膜
‑
骨复合体移植物边缘的骨膜与下方的皮质骨分离;二、骨膜刀经过反复敲击后刀刃容易损坏。由于反复使用的手动骨膜刀难以完全切断骨膜,当退出骨膜刀,更换为手动骨锯钻取骨膜
‑
骨复合体时,移植区的骨膜在手动骨锯旋转切割的过程中发生剥离甚至脱落。现有的手动环锯在使用过程中同样存在以上两个问题。此外,通过以上的手动器械很难根据供区的深度精准获取移植物,手术过程依赖术者经验,很难实现标准化;
[0051]
对于植入移植物:通过减压器将环锯中的移植物敲入骨槽,压缩移植物下层的松质骨,确保移植物表面比周围软骨组织低1mm,确保移植物与受区骨槽紧密贴合。但现有的手术器械存在以下问题:通过手动环锯前后左右摇晃获取的移植物,其断端位置往往不可控,导致获取的移植物的长度与骨槽的深度不匹配,由于缺乏观察窗,植入的过程往往是“盲敲”。这个能会导致两个结果,第一:移植物的长度相对骨柱的深度过长,为达到移植物表面比周围正常组织低1mm的目的,术中可需使用金属减压器反复敲击移植物,最终导致骨膜的损伤以及完整性破坏,移植的骨膜难以在术后发挥成软骨作用;第二:移植物的长度相对骨柱的深度过短,完全敲入移植物的结果是移植物表面相对于周围正常软骨形成过大的凹陷,而我们临床经验和已发表的研究已证实1mm的凹陷为最佳的深度,超过1mm可能导致移植术后难以形成足够的再生软骨填充缺损,低于1mm可能导致术后的再生软骨的高度超过周边正常软骨。另外,通过金属减压器的敲击骨膜虽然可以减少对骨膜的损伤,但我们通过超过150例的骨膜
‑
骨复合体移植手术和超过20例的术后1年二次关节镜探查证实:通过减压器敲击移植物的方式依然会对骨膜结构的完整性造成破坏。
[0052]
现有技术中所述移植物工具的组成结构包括环形骨膜刀和环钻,环形骨膜刀为内径范围为7
‑
15mm,长度为100mm中空管状结构,管壁为1mm,刀口为平口。空心环锯为内径范围为7
‑
15mm,长度为100mm中空管状结构,管壁为1mm,刀口为锯齿状,尾部为t型手柄52。而本发明的所述移植物工具包括中心定位电动骨膜刀1和中心定位电动环锯2,所述中心定位电动骨膜刀1的长度为10mm,内径范围为7
‑
15mm,管壁为1mm,所述第一刀口111为平口。所述中心定位电动骨膜刀1的后方连接长度为100mm的所述第一中空圆形金属杆12,所述第一中空圆形金属杆12直径为6mm,所述第一中空圆形金属杆12的中心孔直径为2mm,尾部为防滑设计,连接电钻。所述中心定位电动环锯2的前方为20mm的中空环锯21,内径范围为7
‑
15mm,管壁为1mm,所述第二刀口221为锯齿状,外壁标尺0
‑
20mm。后方连接长度为100mm的所述第二中空圆形金属杆22,所述第二中空圆形金属杆22直径为6mm,中心孔直径为2mm,尾部为防滑设计,连接电钻。所述t型可视取/植骨套筒5中的所述筒体51的内径范围为7
‑
15mm,长度为100mm中空管状结构,管壁为1mm,所述第三刀口511为锯齿状,所述第三刀口511上方5mm
纵向开设窗口512,其开窗长度为15mm,宽度为2mm,尾部设置有所述t型手柄52。
[0053]
现有技术中所述植入工具的组成结构包括金属减压器、推骨棒31和空心环锯。金属减压器为直径为6
‑
14mm,长度为10mm的金属柱,推骨棒31为直径为7mm,长度为10mm的金属棒。
[0054]
而本发明的所述移植物工具包括软头推骨棒3和植骨棒4,所述推骨棒31直径范围6
‑
14mm,使用时根据配套的所述t型可视取/植骨套筒5选择对应直径的所述推骨棒31。所述软头32的直径为10mm,所用材料为聚亚苯基砜树脂(ppsu),用以保护移植物表面骨膜。后方连接所述第三金属杆33和所述第一手持握柄34。所述第三金属杆33的直径与所述软头32的直径相同,所述第三金属杆33的长度为101mm。所述植骨棒4(带标尺)包括所述第四金属杆41及所述第二手持握柄42。所述第四金属杆41的直径为6
‑
14mm,长度为100mm,标尺范围为0
‑
25mm,标尺起点为所述第四金属杆41的最前端。使用时根据骨槽的直径选择对应的直径的所述推骨棒31。
[0055]
请参阅图7至图9,本发明还提出一种电动骨膜和骨复合体的使用方法,包括如下步骤:
[0056]
s1:使用前在供区打入1mm克氏针,插入所述中心定位电动骨膜刀1,利用克氏针固定中心定位骨膜刀,连接电钻,切取骨膜、骨皮骨复合体,深度为5mm;
[0057]
s2:之后退出所述中心定位电动骨膜刀1,沿克氏针插入直径相同的所述中心定位电动环锯2,钻入皮/松质骨至理想深度;
[0058]
s3:之后退出所述中心定位电动环锯2,退出克氏针,沿所述中心定位电动环锯2的切割轨道插入相同直径的所述t型可视取/植骨套筒5,通过所述窗口512确认移植物深度,前后左右摇晃t型可视取/植骨套筒5,获得理想深度的骨膜
‑
骨复合体移植物;通过所述窗口观察骨膜
‑
骨复合体移植物断端位置,若断端位于t型可视取/植骨套筒5口上方,则自所述t型可视取/植骨套筒5尾端插入较其直径小1mm的所述软头推骨棒3,适当敲击软头推骨棒3,将骨膜
‑
骨复合体移植物断端至与t型可视取/植骨套筒5口齐平位置;
[0059]
s4:根据病变的大小、深度在病变区域钻取对应尺寸骨槽以彻底清除病灶;
[0060]
s5:通过观察所述窗口512确认移植物的长度,采用所述植骨棒4对骨槽植入适量异体骨,敲击所述第二手持握柄42,压实骨槽下方骨床,通过所述植骨棒4外壁的标尺测量骨槽深度,确保骨槽深度比所述t型可视取/植骨套筒5内的移植物低1mm,完成植入前准备;
[0061]
s6:之后将嵌有移植物的所述t型可视取/植骨套筒5插入骨槽,通过所述窗口512确认移植物埋入骨槽,其表面稍高于骨槽周围软骨面,自所述t型可视取/植骨套筒5尾端插入较其直径小1mm的所述软头推骨棒3以固定移植物,而后反向敲击所述t型手柄52,退出所述t型可视取/植骨套筒5,所述推骨棒31敲击移植物表面至低于周围正常软骨1mm位置后完成植入过程。
[0062]
其中,若移植物的基底部未与t型可视取/植骨套筒5头端齐平,则采用软头推骨棒3从移植物的骨膜端向下敲击,直至移植物的下方与视取/植骨套筒头端齐平。
[0063]
本发明提出的一种电动骨膜和骨复合体移植套件及使用方法,能够获取完整的骨膜骨复合体,从而保证移植后骨膜不发生脱落,另外在植入的过程需确保移植物与受区骨槽紧密贴合,最大程度避免术后复发囊性变。
[0064]
具体的,获取移植物:与现有器械获取移植物的过程相比,区别于人工把持固定骨
膜刀,敲击骨膜刀结合手动环钻钻取移植物,新型手术器械采用克氏针定位固定,电钻切割骨膜,钻取移植物。新型手术器械能够解决骨膜与下方皮质骨分离的问题,减少人为敲击对器械的损耗,提升器械的耐用性。另外,通过克氏针定位固定,采用电动钻获取的骨膜
‑
骨复合体骨柱在长度和形状上更标准,能实现手术操作的标准化,减少因术者手术技巧差异对术后疗效区别。
[0065]
植入过程:通过手摇t型可视取/植骨套筒5获取的移植物,由于断端可能不在根部,导致其长度与理想的长度往往有一定误差。植骨棒4(带标尺)对骨槽填塞植骨可以抵消这种误差,确保移植物与骨槽匹配。与传统的手术工具相比,本发明提出的新型手术工具能够确保植入移植的过程能够一次性完成,减少重复操作对骨膜的损伤以及术中移植物掉落的风险。整个过程能够实现精准操作,达到移植后移植物表面比周围正常软骨低1mm的目的。另外,采用所述软头推骨棒3固定移植物,反向敲击退出所述t型可视取/植骨套筒5的操作能够避免在使用现有手术器械敲击移植物时对骨膜造成的损伤。
[0066]
以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。