技术特征:
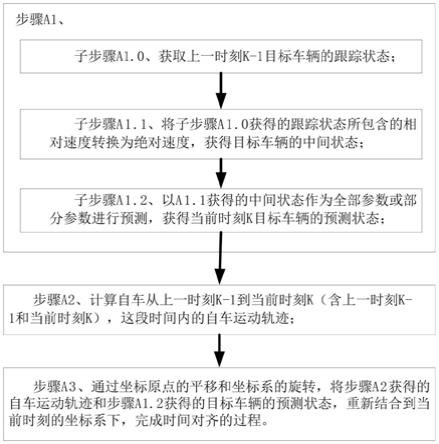
1.用于车辆状态跟踪过程中的时间对齐方法,其特征在于:以自车周围的多个或单个车辆作为目标车辆;具体步骤如下:步骤a1、包含子步骤a1.0、子步骤a1.1和子步骤a1.2:子步骤a1.0、获取上一时刻k
‑
1目标车辆的跟踪状态;子步骤a1.1、将子步骤a1.0获得的跟踪状态所包含的相对速度转换为绝对速度,获得目标车辆的中间状态;子步骤a1.2、以a1.1获得的中间状态作为全部参数或部分参数进行预测,获得当前时刻k目标车辆的预测状态;步骤a2、计算自车从上一时刻k
‑
1到当前时刻k(含上一时刻k
‑
1和当前时刻k),这段时间内的自车运动轨迹;步骤a3、通过坐标原点的平移和坐标系的旋转,将步骤a2获得的自车运动轨迹和步骤a1.2获得的目标车辆的预测状态,重新结合到当前时刻的坐标系下,完成时间对齐的过程。2.用于车辆状态跟踪过程中的时间对齐方法,其特征在于:以自车周围的多个或单个车辆作为目标车辆;具体步骤如下:步骤a1、计算自车从上一时刻k
‑
1到当前时刻k(含上一时刻k
‑
1和当前时刻k),这段时间内的自车运动轨迹;步骤a2、包含子步骤a2.0、子步骤a2.1和子步骤a2.2:子步骤a2.0、获取上一时刻k
‑
1目标车辆的跟踪状态;子步骤a2.1、将子步骤a2.0获得的目标车辆的跟踪状态所包含的相对速度转换为绝对速度,获得目标车辆的中间状态;子步骤a2.2、以a2.1获得的目标车辆的中间状态作为全部参数或部分参数进行预测操作,获得当前时刻k目标车辆的预测状态;步骤a3、通过坐标原点的平移和坐标系的旋转,将步骤a1获得的自车运动轨迹和步骤a2.2获得的目标车辆的预测状态,重新结合到当前时刻的坐标系下,完成时间对齐的过程。3.如权利要求1或2所述的用于车辆状态跟踪过程中的时间对齐方法,其特征在于:所述的平移的具体的量从自车运动轨迹中获取;所述的旋转的具体的量从自车运动轨迹中获取。4.如权利要求1或2所述的用于车辆状态跟踪过程中的时间对齐方法,其特征在于:步骤a1和步骤a2,并行地进行。5.如权利要求1或2所述的用于车辆状态跟踪过程中的时间对齐方法,其特征在于:为方便表达定义一个坐标系,定义自车的一个点为坐标系的原点,坐标系具有x、y两个维度;所述的
‘
目标车辆的跟踪状态所包含的相对速度转换为绝对速度’的具体转换方法如下式(1)~(2),(1)~(2),式中,p
x
表示目标车辆在x方向上的相对于自车的相对位置,p
y
表目标车辆在示y方向上
的的相对于自车的相对位置;v
x
表示目标车辆在x方向上的绝对速度、v
y
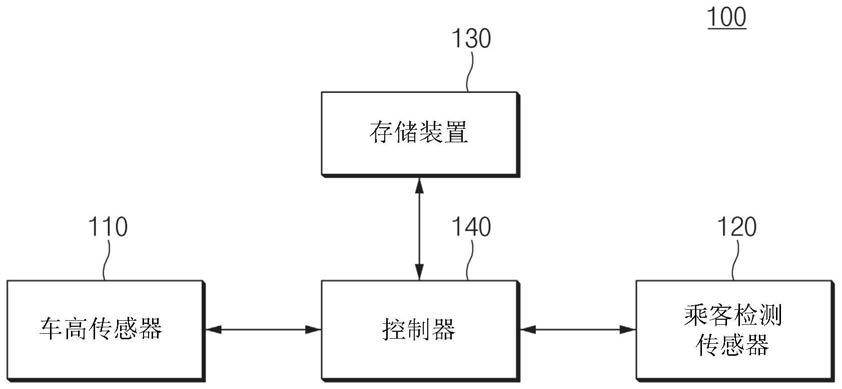
表示目标车辆在y方向上的绝对速度;表示目标车辆在x方向上的相对于自车的相对速度,表示目标车辆在y方向上的相对于自车的相对速度,yawrate表示自车的偏航率。6.如权利要求1或2所述的用于车辆状态跟踪过程中的时间对齐方法,其特征在于:目标车辆的预测状态的预测的方法,具体为:根据车辆的运动学模型,根据目标车辆的跟踪状态以及协方差矩阵预测得到当前时刻k时的目标车辆的预测状态。7.如权利要求1或2所述的用于车辆状态跟踪过程中的时间对齐方法,其特征在于:自车运动轨迹的获取的方法,具体为:从自动驾驶车辆所配备的轮速传感器以及陀螺仪设备上获取上一时刻k
‑
1与当前时刻k之间的自车的运动信息和自车的姿态信息;根据所获取的自车的运动信息和自车的姿态信息计算时刻k
‑
1与时刻k之间自车运动轨迹。8.如权利要求7所述的用于车辆状态跟踪过程中的时间对齐方法,其特征在于:自车的运动信息包含自车的绝对速度;自车的姿态信息包含自车的车辆偏航率。9.如权利要求1或2所述的用于车辆状态跟踪过程中的时间对齐方法,其特征在于:目标车辆的跟踪状态包括目标车辆相对于自车的相对位置,目标车辆的跟踪状态包括目标车辆的绝对速度;目标车辆的预测状态包括目标车辆相对于自车的相对位置,目标车辆的预测状态包括目标车辆的绝对速度。10.如权利要求1或2所述的用于车辆状态跟踪过程中的时间对齐方法,其特征在于:用于车载毫米波雷达车辆状态跟踪。
技术总结
本发明涉及自动驾驶。用于车辆状态跟踪过程中的时间对齐方法:以自车周围的多个或单个车辆作为目标车辆;步骤A1、包含子步骤A1.0、子步骤A1.1和子步骤A1.2:子步骤A1.0、获取上一时刻K
技术研发人员:于伸庭 朱俊 张燕 代云超
受保护的技术使用者:上海宏景智驾信息科技有限公司
技术研发日:2021.08.23
技术公布日:2021/12/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。