用于自适应滤波的lms权值迭代计算装置及方法
技术领域
1.本发明涉及自适应滤波技术领域,尤其涉及一种用于自适应滤波的lms(least mean square,最小均方)权值迭代计算装置及方法。
背景技术:
2.自适应滤波器即是使用自适应算法改变滤波器的参数、结构,以实现自适应滤波效果。在自适应滤波的实时处理过程中,需要确定出最佳权值,确定最佳权值的计算方法主要直接计算和迭代递推计算两种,其中直接计算方法是通过矩阵求逆的方式完成,虽然可以直接求取出最优权值,但是运算量较大,对硬件资源要求较高,而迭代递推计算方法是通过一定的算法实时更新权值,使权值矢量从初始状态逐渐收敛到最优权值,与直接计算方法相比,迭代递推计算方法能够简化计算难度,因而实际的工程上应用较多。
3.在权值的迭代递推计算方法中,较为常用的即为lms算法,lms算法即是通过用梯度估计代替梯度以近似实现最陡下降法,即用瞬时输出误差功率的梯度作为均方根误差梯度的估计,来计算权值步进量,最终沿着使误差性能函数减小的方向收敛到最优权值。权值的迭代计算通常即与基于上述lms算法在fpga中实现,但是由于迭代计算中存在复数乘法,不仅迭代实现复杂,需要消耗大量的硬件乘法器资源、增加实现成本,且复杂的计算会降低迭代计算效率,乘法器的使用数量还会限制fpga规模的选择范围。在自适应滤波实际应用中,通常会包含大量的处理通道,当通道数目较多时,权值的迭代更新过程则需要进行大量的乘法运算,造成大量的硬件资源消耗以及大量的乘法运算。
4.自适应滤波中基于lms算法的单个支路控制环路如图1所示,其中在自适应滤波过程中权值w
i
的递推公式可表示为:
[0005][0006]
其中x
i
表示输入滤波信号,e表示误差信号,w
i
、x
i
、e均为复数,即:、e均为复数,即:e=e
i
je
q
;
[0007]
每次权值的迭代结果w
i
(n 1)的计算需要分为实部和虚部两部分实现,即:
[0008][0009][0010]
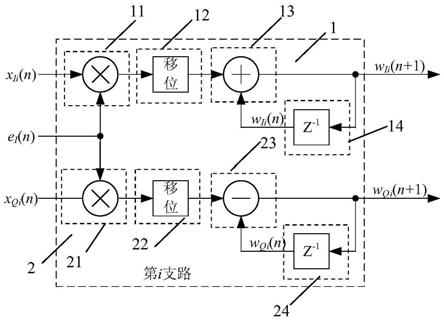
为了实现上述权值(2)、(3)的迭代计算,现有技术中基于lms算法的权值迭代单个支路通常是采用如图2所示的电路结构,其中包括4个乘法器、四个加法器,即每迭代计算一次,对应每一个支路的权值w
i
(n 1)更新都需要进行4次乘法运算和4次加法运算,这会使得需要消耗较多的硬件乘法器资源,尤其是当应用于通道数目较多时需要消耗大量的硬件资源以及执行大量的乘法运算。
[0011]
综上,在自适应滤波中使用lms算法进行权值迭代计算时,由于存在复数乘法运
算,且计算权值实部的步进量需要误差信号和输入滤波信号的实部和虚部,计算权值虚部的步进量也需要误差信号和输入滤波信号的实部和虚部,而一路复权值的一次迭代需要4次乘法和4次加法运算,因而需要消耗较多的硬件资源以及执行大量的乘法运算,致使实现成本高、执行效率低。
技术实现要素:
[0012]
本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种结构简单紧凑、成本低、硬件资源消耗少、计算量小且迭代效率高用于自适应滤波的lms权值迭代计算装置及方法。
[0013]
为解决上述技术问题,本发明提出的技术方案为:
[0014]
一种用于自适应滤波的lms权值迭代计算装置,包括:
[0015]
实部计算电路,用于每次迭代计算时计算自适应滤波中权值的实部,并在计算时使用上一次迭代时的误差信号在复数域的指定部分计算当前次迭代的步进值,所述在复数域的指定部分为实部或者为虚部,所述误差信号为期望输出信号和实际输出信号之间的误差;
[0016]
虚部计算电路,用于每次迭代时计算自适应滤波中权值的虚部,并在计算时使用所述上一次迭代时的误差信号在复数域的指定部分计算当前次迭代的步进值。
[0017]
进一步的,实部计算电路中,输入上一次迭代时输入滤波信号的实部、上一次迭代时的误差信号在复数域的指定部分以及上一次迭代时权值的实部,计算出当前次迭代的权值的实部;
[0018]
所述虚部计算电路中,输入上一次迭代时输入滤波信号的虚部、所述上一次迭代时的误差信号在复数域的指定部分以及上一次迭代时权值的虚部部分,计算出当前次迭代的权值的虚部部分。
[0019]
进一步的,所述实部计算电路包括第一乘法单元、第一移位单元、第一加法单元以及第一延时单元,所述第一乘法单元的输入端分别接入上一次迭代时所述输入滤波信号的实部、所述误差信号在复数域的指定部分,输出端与所述第一移位单元的输入端连接,所述第一加法单元的输入端分别连接所述第一移位单元的输出端、所述第一延时单元的输出端,所述第一加法单元的输出端还与所述第一延时单元的输入端连接,由所述第一加法单元的输出端输出所述当前次迭代的权值的实部。
[0020]
进一步的,所述虚部计算电路包括第二乘法单元、第二移位单元、第二加法单元以及第二延时单元,所述第二乘法单元的输入端分别接入上一次迭代时所述输入滤波信号的虚部、所述误差信号在复数域的指定部分,输出端与所述第二移位单元的输入端连接,所述第二加法单元的输入端分别连接所述第二移位单元的输出端、所述第二延时单元的输出端,所述第二加法单元的输出端还与所述第二延时单元的输入端连接,由所述第二加法单元的输出端输出所述当前次迭代的权值的虚部部分。
[0021]
进一步的,所述实部计算电路、虚部计算电路中所述误差信号在复数域的指定部分均为误差信号的实部,或者所述实部计算电路、虚部计算电路中所述误差信号在复数域的指定部分均为误差信号的虚部,或者所述实部计算电路、虚部计算电路中所述误差信号在复数域的指定部分一个为误差信号的虚部、另一个为误差信号的虚部。
[0022]
一种用于自适应滤波的lms权值迭代计算方法,步骤包括:
[0023]
每次迭代计算时计算自适应滤波中权值的实部,并在计算时使用上一次迭代时的误差信号在复数域的指定部分计算当前次迭代的步进值,所述在复数域的指定部分为实部或者为虚部,所述误差信号为期望输出信号和实际输出信号之间的误差;
[0024]
每次迭代时计算自适应滤波中权值的虚部,并在计算时使用所述上一次迭代时的误差信号在复数域的指定部分计算当前次迭代的步进值。
[0025]
进一步的,所述计算自适应滤波中权值的实部时,输入上一次迭代时输入滤波信号的实部、上一次迭代时的误差信号在复数域的指定部分以及上一次迭代时权值的实部,计算出当前次迭代的权值的实部;
[0026]
所述计算自适应滤波中权值的虚部时,输入上一次迭代时输入滤波信号的虚部、所述上一次迭代时的误差信号在复数域的指定部分以及上一次迭代时权值的虚部部分,计算出当前次迭代的权值的虚部部分。
[0027]
进一步的,所述计算出当前次迭代的权值的实部包括:接入上一次迭代时的所述输入滤波信号的实部、所述误差信号在复数域的指定部分,经过乘法运算后进行移位,输出移位后结果;将所述移位后结果、当前次迭代的权值的实部经过延时后结果进行加法运算,得到当前次迭代的权值的实部输出。
[0028]
所述计算出当前次迭代的权值的虚部部分包括:接入上一次迭代时所述输入滤波信号的虚部、所述误差信号在复数域的指定部分,经过乘法运算后进行移位,输出移位后结果;将所述移位后结果、当前次迭代的权值的虚部经过延时后结果进行加法运算,得到当前次迭代的权值的虚部输出。
[0029]
进一步的,每次迭代计算时计算所述权值的实部、所述权值的虚部中所述误差信号在复数域的指定部分均为误差信号的实部,或者每次迭代计算时计算所述权值的实部、所述权值的虚部中所述误差信号在复数域的指定部分均为误差信号的虚部,或者所述每次迭代计算时计算所述权值的实部、所述权值的虚部中所述误差信号在复数域的指定部分一个为误差信号的虚部、另一个为误差信号的虚部。
[0030]
进一步的,每次迭代计算时还包括增加调整迭代的步长因子,以对迭代的收敛速度进行补偿。
[0031]
与现有技术相比,本发明的优点在于:
[0032]
1、本发明用于自适应滤波的lms权值迭代计算装置,通过设置实部计算电路、虚部计算电路分别实现每次迭代的实部计算、虚部计算,实部计算电路、虚部计算电路计算时取误差信号在复数域的实部计算当前次迭代的步进值,由于仅取了误差信号的部分信号计算步进值,可以大大减少所需乘法器的使用、减小所需计算量,降低对系统硬件要求,同时提高迭代计算的效率,从而能够在不损失稳态性能的前提下,实现快速、高效的自适应滤波。
[0033]
2、本发明用于自适应滤波的lms权值迭代计算方法,通过每次迭代时实部计算、虚部计算电路取误差信号在复数域的实部计算当前次迭代的步进值,由于仅取了误差信号的部分信号计算步进值,可以大大减少所需计算量,降低对系统硬件要求,提高迭代计算的效率,同时能够确保不影响系统的稳态性能。
附图说明
[0034]
图1是现有技术中lms单个支路控制环路的结构原理示意图。
[0035]
图2是现有技术中基于lms算法的权值迭代单个支路的结构原理示意图。
[0036]
图3是本发明实施例1中用于自适应滤波的lms权值迭代计算装置的结构示意图。
[0037]
图4是误差信号的矢量表示原理示意图。
[0038]
图5是在具体应用实施例中采用传统方法得到的lms权值收敛过程曲线结果示意图。
[0039]
图6是在具体应用实施例中采用本发明装置得到的权值收敛过程曲线结果示意图。
[0040]
图7是在具体应用实施例中采用本发明装置并修改步长因子得到的权值收敛过程曲线结果示意图。
[0041]
图8是本发明实施例2中用于自适应滤波的lms权值迭代计算装置的结构示意图。
[0042]
图例说明:1、实部计算电路;11、第一乘法单元;12、第一移位单元;13、第一加法单元;14、第一延时单元;2、虚部计算电路;21、第二乘法单元;22、第二移位单元;第23、二加法单元;24、第二延时单元。
具体实施方式
[0043]
以下结合说明书附图和具体优选的实施例对本发明作进一步描述,但并不因此而限制本发明的保护范围。
[0044]
实施例1:
[0045]
如图3所示,本实施例用于自适应滤波的lms权值迭代计算装置,用于执行自适应滤波中第i支路的权值迭代计算,包括:
[0046]
实部计算电路1,用于每次迭代计算时计算权值的实部,并在计算时使用上一次迭代时的误差信号在复数域的指定部分计算当前次迭代的步进值,误差信号为期望输出信号和实际输出信号之间的误差;
[0047]
虚部计算电路2,用于每次迭代时计算权值的虚部,并在计算时使用上一次迭代时的误差信号在复数域的指定部分计算当前次迭代的步进值。上述实部计算电路1、虚部计算电路2中误差信号在复数域的指定部分具体均为误差信号的实部。
[0048]
本实施例首先分析基于lms算法进行权值迭代的特性,由于基于lms算法进行权值迭代是通过用梯度估计代替梯度以近似实现最陡下降,即由瞬时输出误差功率的梯度作为均方根误差梯度的估计,最终沿着使误差性能函数减小的方向收敛到最优权值,因而误差函数决定了权值步进的方向和步进大小,步进的方向决定了迭代过程是否收敛,步进的大小决定了收敛的速度,而直接使用误差信号迭代计算权值时,由于误差信号为复数信号,需要使用大量的乘法器,致使需要消耗大量的硬件资源以及执行大量的乘法运算。本实施例考虑基于lms算法进行权值迭代的上述特性,通过设置实部计算电路1、虚部计算电路2分别实现每次迭代的实部计算、虚部计算,实部计算电路1、虚部计算电路2计算时取误差信号在复数域的实部计算当前次迭代的步进值,由于仅取了误差信号的部分信号计算步进值,可以大大减少所需乘法器的使用、减小所需计算量,降低对系统硬件要求,同时提高迭代计算的效率,从而能够在不损失稳态性能的前提下,实现快速、高
效的自适应滤波。
[0049]
如式(1)所示,权值w
i
的递推公式为:
[0050][0051]
其中,x
i
表示输入滤波信号,e表示误差信号,w
i
、x
i
、e均为复数,即:、e均为复数,即:e=e
i
je
q
,n表示迭代次数,i表示当前迭代所处的支路数。
[0052]
误差信号e(n)为复数,在复平面上表示为一个矢量,如图4所示。
[0053]
在迭代计算过程中,复数权值w
i
的步进为:
[0054][0055]
即误差信号e(n)确定了步进的大小和方向。
[0056]
本实施例使用误差信号的实部e
i
(n)计算步进δw
i
(n),则复数权值w
i
的步进变为:
[0057][0058]
由式(5)可知,此时的步进δw
′
i
(n)与原步进δw
i
(n)相比,幅度可能会变小,方向可能也会有一定偏差但并不会改变权值的迭代过程沿着使误差性能函数减小的方向收敛的趋势,即仍然能够保持lms权值迭代时沿着使误差性能函数减小的方向收敛的趋势,使得最终能够收敛到最优权值。以下进行具体的分析:
[0059]
首先设定:
[0060][0061]
即:
[0062][0063][0064]
其中e(n)与δw
i
(n)的幅度有关,与δw
i
(n)的方向有关。
[0065]
当使用e
i
(n)代替e(n),则δwi
i
(n)由决定,所以权值w
i
的步进幅度和方向都可能与δw
i
(n)有一定偏差:
[0066]
(1)当接近或时,δw
′
i
(n)与δw
i
(n)的方向偏差较大,但此时较小甚至趋于0,所以δw
′
i
(n)幅值比较小,权值变化也比较小。
[0067]
(2)当接近0或
±
π时,δw
′
i
(n)与δw
i
(n)的方向接近或相同,此时接近或等于1,δw
′
i
(n)幅值接近或等于δw
i
(n),即权值w
i
的变化量与lms算法迭代计算的结果接近或相同。
[0068]
即本实施例通过使用误差信号的实部e
i
(n)计算权值w
i
迭代的步进值,相比于传统的直接使用误差信号e(n)来计算权值w
i
迭代的步进值,仍然可以确保迭代过程沿着使误差性能函数减小的方向最终收敛到最优权值,保证lms权值迭代的性能。
[0069]
进一步的,本实施例使用误差信号的实部e
i
(n)计算权值w
i
迭代的步进值,则权值w
i
的递推公式为:
[0070][0071]
在实际计算时,w
i
(n 1)的实部和虚部的迭代递推计算公式为:
[0072][0073][0074]
从式(10)、(11)可知,每迭代计算一次,对应每一个支路的权值w
i
(n 1)更新,只需要2次乘法运算和2次加法运算,乘法运算相比于传统基于lms算法的权值迭代减少了2次乘法运算、2次加法运算,大大减少了所需的硬件资源开销以及所需计算量,尤其是在支路较多的情况下,能够显著降低对硬件资源的需求、减少迭代计算量,提高迭代计算的效率。
[0075]
考虑到简化使用误差信号的实部e
i
(n)计算权值w
i
迭代的步进值时,由于权值迭代的平均步进相比于原始lms算法会有所减小,因而这种简化会降低权值的收敛速度,即权值的收敛过程相比于原始收敛速度要慢一点。本实施例进一步可以通过适当增大步长因子k,以对收敛速度进行补偿,而且不会影响系统的稳态性能。
[0076]
如图4所示,本实施例实部计算电路1中,输入上一次迭代时输入滤波信号的实部、上一次迭代时的误差信号的实部以及上一次迭代时权值的实部,根据输入的数据计算出当前次迭代的权值的实部;虚部计算电路2中,输入上一次迭代时输入滤波信号的虚部、上一次迭代时的误差信号的实部以及上一次迭代时权值的虚部部分,根据输入的数据计算出当前次迭代的权值的虚部部分。
[0077]
本实施例实部计算电路1中,上一次迭代时权值的实部具体使用当前次迭代得到的权值的实部经过延时后得到;虚部计算电路2中,上一次迭代时权值的虚部部分具体使用当前次迭代得到的权值的虚部部分经过延时后得到。如图4所示,实部计算电路1、虚部计算电路2具体经过一个延时单元,将当前次迭代得到的权值经过延时后得到上一次迭代时的权值。
[0078]
如图3所示,本实施例实部计算电路1具体包括第一乘法单元11、第一移位单元12、第一加法单元13以及第一延时单元14,第一乘法单元11的输入端分别接入上一次迭代时输入滤波信号的实部、误差信号的实部,输出端与第一移位单元12的输入端连接,第一加法单元13的输入端分别连接第一移位单元12的输出端、第一延时单元14的输出端,第一加法单元13的输出端还与第一延时单元14的输入端连接,由第一加法单元13的输出端输出当前次迭代的权值的实部。由第一乘法单元11接入上一次迭代时的输入滤波信号的实部、误差信号的实部,经过乘法运算后由第一移位单元12进行移位,输出移位后结果;第一加法单元13将移位后结果、当前次迭代的权值的实部经过第一延时单元14延时后结果进行加法运算,得到当前次迭代的权值的实部输出。通过上述结构,即可以实现式(10)的实部计算,且仅需要使用一个乘法单元、一个加法单元。
[0079]
本实施例中,虚部计算电路2包括第二乘法单元21、第二移位单元22、第二加法单元23以及第二延时单元24,第二乘法单元21的输入端分别接入上一次迭代时输入滤波信号的虚部、误差信号的实部,输出端与第二移位单元22的输入端连接,第二加法单元23的输入端分别连接第二移位单元22的输出端、第二延时单元24的输出端,第二加法单元23的输出端还与第二延时单元24的输入端连接,由第二加法单元23的输出端输出当前次迭代的权值的虚部部分。由第二乘法单元21接入上一次迭代时输入滤波信号的虚部、误差信号的实部,经过乘法运算后由第二移位单元22进行移位,输出移位后结果;第二加法单元23将移位后结果、当前次迭代的权值的虚部经过第二延时单元24延时后结果进行加法运算,得到当前
次迭代的权值的虚部输出。通过上述结构,即可以实现式(11)的虚部计算,且仅需要使用一个乘法单元、一个加法单元。
[0080]
上述第一移位单元12、第二移位单元22具体通过移位以实现系数2k运算,以尽量的避免乘法运算,进一步减少乘法器的使用。当然第一移位单元12、第二移位单元22具体的移位数可以根据实际需求配置。
[0081]
本实施例通过上述迭代计算装置,可以使得自适应滤波在权值迭代计算过程中的计算量减小到传统方案的1/2,且大大降低了对硬件资源的需求,同时能够确保不影响系统的稳态性能。
[0082]
为验证本发明的有效性,在相同信号环境下分别使用传统lms算法进行权值迭代以及使用本发明上述迭代计算装置进行权值迭代,得到的收敛过程仿真结果对比如图5~图7所示,其中图5为使用传统lms迭代算法得到的收敛过程曲线结果,图6为采用本发明迭代计算装置得到的收敛曲线结果,图7为使用本发明迭代计算装置同时修改步长因子(修改为原始两倍)补偿情况下,第2路权值的实部和虚部的收敛过程结果,上述各图中左侧均对应为实部的结果,右侧均对应为虚部的结果。从图5~7可知,采用本发明迭代装置,不能能够显著减小计算量,同时能够保持权值的收敛性和系统的稳态性能。
[0083]
本实施例进一步上述用于自适应滤波的lms权值迭代计算装置还可以设置多个,每个迭代计算装置对应一个支路的权值计算更新,以实现多支路、多通道的权值计算更新,具体的迭代计算装置数量可依据支路、通道需求确定。
[0084]
本实施例还包括用于自适应滤波的lms权值迭代计算方法,该方法包括:
[0085]
实部计算:每次迭代计算时计算自适应滤波中权值的实部,并在计算时使用上一次迭代时的误差信号在复数域的指定部分计算当前次迭代的步进值,在复数域的指定部分为实部或者为虚部,误差信号为期望输出信号和实际输出信号之间的误差;
[0086]
虚部计算:每次迭代时计算自适应滤波中权值的虚部,并在计算时使用上一次迭代时的误差信号在复数域的指定部分计算当前次迭代的步进值。
[0087]
本实施例通过上述步骤,每次迭代时实部计算、虚部计算电路取误差信号在复数域的实部计算当前次迭代的步进值,由于仅取了误差信号的部分信号计算步进值,可以大大减少所需乘法器的使用、减小所需计算量,降低对系统硬件要求,同时提高迭代计算的效率,从而能够在不损失稳态性能的前提下,实现快速、高效的自适应滤波。
[0088]
本实施例中,计算自适应滤波中权值的实部时,具体输入上一次迭代时输入滤波信号的实部、上一次迭代时的误差信号的实部以及上一次迭代时权值的实部,根据输入的数据计算出当前次迭代的权值的实部;
[0089]
计算权值的虚部时,具体输入上一次迭代时输入滤波信号的虚部、上一次迭代时的误差信号的实部以及上一次迭代时权值的虚部部分,根据输入的数据计算出当前次迭代的权值的虚部部分。
[0090]
本实施例中,上述计算出当前次迭代的权值的实部具体包括:接入上一次迭代时的输入滤波信号的实部、误差信号的实部,经过乘法运算后进行移位,输出移位后结果;将移位后结果、当前次迭代的权值的实部经过延时后结果进行加法运算,得到当前次迭代的权值的实部输出。具体可采用图4中所示的实部计算模块1实现该步骤。
[0091]
本实施例中,上述出计算当前次迭代的权值的虚部部分包括:接入上一次迭代时
输入滤波信号的虚部、误差信号的实部,经过乘法运算后进行移位,输出移位后结果;将移位后结果、当前次迭代的权值的虚部经过延时后结果进行加法运算,得到当前次迭代的权值的虚部输出。具体可采用图4中所示的虚部计算模块2实现该步骤。
[0092]
本实施例用于自适应滤波的lms权值迭代计算方法中,实部计算步骤即与上述用于自适应滤波的lms权值迭代计算装置中实部计算模块1对应,即基于实部计算模块1按照上述步骤实现实部计算,虚部计算步骤即与上述用于自适应滤波的lms权值迭代计算装置中虚部计算模块2对应,即基于虚部计算模块2按照上述步骤实现虚部计算,迭代计算方法与迭代计算装置具有相对应的实现原理及效果,在此不再一一赘述。
[0093]
实施例2:
[0094]
如图8所示,本实施例用于自适应滤波的lms权值迭代计算装置,包括:
[0095]
实部计算电路1,用于每次迭代计算时计算权值的实部,并在计算时使用上一次迭代时的误差信号的虚部计算当前次迭代的步进值,所误差信号为期望输出信号和实际输出信号之间的误差;
[0096]
虚部计算电路2,用于每次迭代时计算权值的虚部,并在计算时使用所述上一次迭代时的误差信号的虚部计算当前次迭代的步进值。
[0097]
本实施例实部计算电路1、虚部计算电路2中误差信号在复数域的指定部分均为误差信号的虚部,即每次迭代计算时计算自适应滤波中权值的实部、虚部过程中,使用上一次迭代时的误差信号的虚部(je
q
(n))计算当前次迭代的步进值。与实施例1原理相同的,使用上一次迭代时的误差信号的虚部(je
q
(n))计算当前次迭代的步进值,相比于传统直接使用误差信号e(n)计算步进值,同样可以达到硬件资源消耗、计算量减半的效果,且不会改变系统收敛的过程。
[0098]
本实施例实部计算电路1中输入上一次迭代时输入滤波信号的实部、上一次迭代时的误差信号的虚部以及上一次迭代时权值的实部,计算出当前次迭代的权值的实部;
[0099]
虚部计算电路2中输入上一次迭代时输入滤波信号的虚部、上一次迭代时的误差信号的虚部以及上一次迭代时权值的虚部部分,计算出当前次迭代的权值的虚部部分。
[0100]
本实施例中,实部计算电路1包括第一乘法单元11、第一移位单元12、第一加法单元13以及第一延时单元14,第一乘法单元11的输入端分别接入上一次迭代时输入滤波信号的实部、误差信号在虚部,输出端与第一移位单元12的输入端连接,第一加法单元13的输入端分别连接第一移位单元12的输出端、第一延时单元14的输出端,第一加法单元13的输出端还与第一延时单元14的输入端连接,由第一加法单元13的输出端输出当前次迭代的权值的实部。
[0101]
本实施例中,虚部计算电路2包括第二乘法单元21、第二移位单元22、第二加法单元23以及第二延时单元24,第二乘法单元21的输入端分别接入上一次迭代时输入滤波信号的虚部、误差信号的虚部,输出端与第二移位单元22的输入端连接,第二加法单元23的输入端分别连接第二移位单元22的输出端、第二延时单元24的输出端,第二加法单元23的输出端还与第二延时单元24的输入端连接,由第二加法单元23的输出端输出当前次迭代的权值的虚部部分。
[0102]
与实施例1原理相同的,考虑到简化使用误差信号的虚部je
q
(n)计算权值w
i
迭代的步进值时,由于权值迭代的平均步进相比于原始lms算法会有所减小,因而这种简化会降低
权值的收敛速度,即权值的收敛过程相比于原始收敛速度要慢一点。本实施例进一步可以通过适当增大步长因子k,以对收敛速度进行补偿,而且不会影响系统的稳态性能。
[0103]
本实施例与实施例1基本相同,不同之处仅在于,实部计算电路1、虚部计算电路2中误差信号在复数域的指定部分均为误差信号的虚部,即每次迭代计算时计算自适应滤波中权值的实部、虚部过程中,使用上一次迭代时的误差信号的虚部(je
q
(n))计算当前次迭代的步进值,原理与实施例1相同,在此不再一一赘述。
[0104]
实施例3:
[0105]
本实施例与实施例1基本相同,不同之处在于实部计算电路1、虚部计算电路2中误差信号在复数域的指定部分一个为误差信号的虚部、另一个为误差信号的虚部,即每次迭代计算时计算自适应滤波中权值的实部、虚部过程中,一个使用上一次迭代时的误差信号的实部(e
i
(n))计算当前次迭代的步进值,另一个使用上一次迭代时的误差信号的虚部(je
q
(n))计算当前次迭代的步进值。如计算实部时使用上一次迭代时的误差信号的实部(e
i
(n))计算当前次迭代的步进值,计算虚部时使用上一次迭代时的误差信号的虚部(je
q
(n))计算当前次迭代的步进值,具体使用方式可根据实际需求配置。
[0106]
本实施例通过组合使用误差信号的实部(e
i
(n))、误差信号的虚部(je
q
(n))计算迭代的步进值,由于同时引入了误差信号的实部(e
i
(n))、虚部(je
q
(n)),在实部、虚部计算时又仅是使用了部分误差信号,能够在减少硬件资源消耗、计算量,保持迭代收敛效果的同时,还能够确保迭代计算的精度,以减少由于简化误差信号所带来的计算误差。
[0107]
上述只是本发明的较佳实施例,并非对本发明作任何形式上的限制。虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明。因此,凡是未脱离本发明技术方案的内容,依据本发明技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均应落在本发明技术方案保护的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。