技术特征:
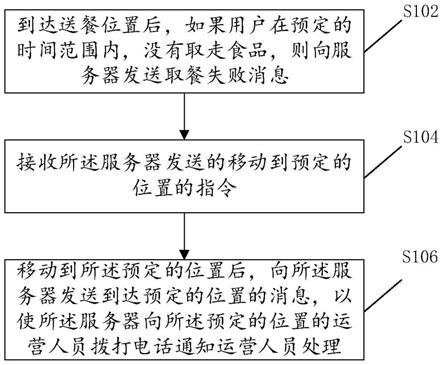
1.一种送餐机器人送餐任务的分配方法,其特征在于,应用于机器人,包括:到达送餐位置后,如果用户在预定的时间范围内,没有取走食品,则向服务器发送取餐失败消息;接收所述服务器发送的移动到预定的位置的指令;移动到所述预定的位置后,向所述服务器发送到预定的位置的消息,以使所述服务器向所述预定的位置的运营人员拨打电话通知运营人员处理。2.根据权利要求1所述的送餐机器人送餐任务的分配方法,其特征在于,到达送餐位置后,向服务器发送到达送餐位置的消息,以使服务器拨打用户的电话,通知用户取餐。3.根据权利要求1所述的送餐机器人送餐任务的分配方法,其特征在于,还包括:接收运营人员输入的打开舱门的秘钥,控制舱门打开;以使运营人员取走舱格内的食品。4.根据权利要求1所述的送餐机器人送餐任务的分配方法,其特征在于,接收运营人员输入的打开舱门的秘钥之前,还包括:对所述运营人员进行身份校验,如果身份校验不通过,则拒绝接收所述运营人员的秘钥。5.根据权利要求1所述的送餐机器人送餐任务的分配方法,其特征在于,舱门打开后,返回待命点;或者执行下一次送餐任务。6.一种送餐机器人送餐任务的分配方法,其特征在于,应用于服务器,包括:接收送餐机器人到达送餐位置后,如果用户在预定的时间范围内,没有取走食品,发送的取餐失败消息;向所述送餐机器人发送移动到预定的位置的指令;接收送餐机器人移动到所述预定的位置后发送的消息;向所述预定的位置的运营人员拨打电话通知运营人员处理。7.一种送餐机器人送餐任务的分配装置,其特征在于,应用于机器人,包括:发送模块,用于到达送餐位置后,如果用户在预定的时间范围内,没有取走食品,则向服务器发送取餐失败消息;以及移动到所述预定的位置后,向所述服务器发送到预定的位置的消息,以使所述服务器向所述预定的位置的运营人员拨打电话通知运营人员处理;接收模块,用于接收所述服务器发送的移动到预定的位置的指令。8.根据权利要求7所述的送餐机器人送餐任务的分配装置,其特征在于,发送模块,还用于到达送餐位置后,向服务器发送到达送餐位置的消息,以使服务器拨打用户的电话,通知用户取餐。9.根据权利要求8所述的送餐机器人送餐任务的分配装置,其特征在于,还包括:舱门控制模块,用于接收运营人员输入的打开舱门的秘钥,控制舱门打开;以使运营人员取走舱格内的食品。10.根据权利要求7所述的送餐机器人送餐任务的分配装置,其特征在于,还包括验证模块,用于接收运营人员输入的打开舱门的秘钥之前,对所述运营人员进行身份校验,如果身份校验不通过,则拒绝接收所述运营人员的秘钥。
技术总结
本申请公开了一种送餐机器人送餐任务的分配方法和装置。该方法包括:到达送餐位置后,如果用户在预定的时间范围内,没有取走食品,则向服务器发送取餐失败消息;接收所述服务器发送的移动到预定的位置的指令;移动到所述预定的位置后,向所述服务器发送到预定的位置的消息,以使所述服务器向所述预定的位置的运营人员拨打电话通知运营人员处理。避免了机器人在繁忙的送餐任务中,因为无人领餐而导致的延误,提高了整体的送餐的效率。提高了整体的送餐的效率。提高了整体的送餐的效率。
技术研发人员:肖夏 支涛
受保护的技术使用者:北京云迹科技有限公司
技术研发日:2021.08.19
技术公布日:2021/12/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。