技术特征:
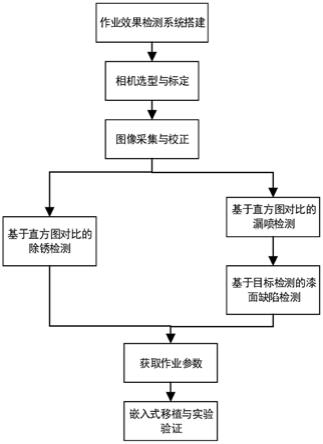
1.一种基于双目视觉的立面作业效果与表面缺陷检测方法,其特征在于,包括以下步骤:第一步,将双目相机安装到爬壁机器人上;第二步,对双目相机进行标定;第三步,爬壁机器人在船舶的立面进行除锈作业,双目相机对除锈作业后立面进行实时图像采集;控制器对采集到的图像进行校正;第四步,控制器将校正后的图像与事先准备好的除锈效果合格的样板照片进行对比,相似度达到一定值时认为除锈作业合格;第五步,爬壁机器人对船舶的立面除锈后的部分进行喷漆,双目相机对喷漆后的立面进行实时图像采集;第六步,控制器将双目相机采集到的喷漆后图像与事先准备好的完全喷涂的样板照片进行对比,相似度达到一定程度时认为喷漆作业合格。2.根据权利要求1所述的基于双目视觉的立面作业效果与表面缺陷检测方法,其特征在于:当检测到除锈不合格,调整爬壁机器人除锈作业参数;当检测到喷漆作业不合格,则控制爬壁机器人向漏喷区域偏移一定距离,调整作业路线。3.根据权利要求2所述的基于双目视觉的立面作业效果与表面缺陷检测方法,其特征在于:当检测到油漆面存在波纹缺陷,则减小爬壁机器人的枪口出漆量;当检测到油漆面存在针孔缺陷,系统报警提示操作人员调整油漆配比。4.根据权利要求1所述的基于双目视觉的立面作业效果与表面缺陷检测方法,其特征在于:所述第四步中,控制器将校正后的图像与事先准备好的除锈效果合格的样板照片进行对比,具体基于直方图对比的方法,图像直方图是用以表示数字图像中亮度分布的直方图,统计每一个强度值所具有的像素个数,根据除锈效果合格的样板照片计算得到直方图h1,再根据双目相机采集到的图像计算得到图像直方图hi,设定一个衡量直方图相似度的阈值,将h1与hi进行对比,相似度达到设定的阈值时认为除锈作业合格,否则认定为不合格;所述第六步中,对比的具体过程是,漏喷检测采用基于直方图对比的方法,根据完全喷涂的样板照片计算出直方图h2,实时采集实际喷漆作业后的图像直方图hj,设定对比标准,将h2与hj对比,满足标准的认为无漏喷现象。5.根据权利要求1所述的基于双目视觉的立面作业效果与表面缺陷检测方法,其特征在于,在第四步除锈过程之后,在第五步喷漆作业之前,对船舶立面的表面进行缺陷检测;具体过程是,首先利用模拟缺陷数据集训练yolov3的模型,经过多次迭代,得到检测权重模型,在彩色图中识别出缺陷的类别和位置;然后采用遍历像素的方法求出各缺陷的深度信息,具体过程为:将彩色图与深度图配准,在深度图中,以彩色图的检测框区域作为感兴趣区域,遍历感兴趣区域内所有像素点并记录对应的深度值,将对应的深度最大值和最小值求差,以此作为该处缺陷的深度信息;最后将目标检测结果与深度信息结合起来判断此处缺陷是否达到设定的缺陷标准,如果达到设定的缺陷标准则认为是缺陷。
技术总结
本发明涉及一种基于双目视觉的立面作业效果与表面缺陷检测方法,其解决了现有爬壁机器人对船舶、储罐的立面除锈、喷漆后无法检测作业效果的技术问题,其首先确定当前立面作业机器人工作种类,分别为立面除锈、喷漆和表面缺陷检测,其次分别进行视觉检测,为机器人提供新的作业参数,然后对新作业参数下的作业效果继续检测,实时动态调整新的作业参数。本发明可广泛应用于船舶、储罐的立面除锈、喷漆等作业效果以及立面表面缺陷进行检测。作业效果以及立面表面缺陷进行检测。作业效果以及立面表面缺陷进行检测。
技术研发人员:余大海 徐彬洋 钟鸣 刘亚欣
受保护的技术使用者:哈尔滨工业大学(威海)
技术研发日:2021.08.31
技术公布日:2021/12/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。