1.本发明涉及手肘专用康复技术领域,具体为一种骨科用手肘专用康复器械。
背景技术:
2.骨科病人的手肘做完手术之后,一般需要在医院住一段时间,骨科病人在住院期间,一般需要活动骨科病人的手肘,来加快手肘恢复的速度,目前一般是医护人员用手握着骨科病人的手上下摆动,来活动骨科病人的手肘,但是骨科病人的手肘刚做完手术,活动的速度不宜过快,因此医护人员需要花费较长的时间才能达到加快手肘恢复速度的目的;并且为了促进血液循环,医护人员一般会活动骨科病人腿部。
3.现有的手肘康复器械通常将人手臂绑在可以折叠的设备上,利用设备电机或者伸缩机构是的设备折叠弯曲,使得人手臂进行弯曲,从而进行康复训练,但是通过这种纯机械的长时间弯曲拉升,且受到绑带的长期束缚,极易导致患者血脉不通,从而使得患者出现麻痹的现象出现;其次通过外部机械运行,通常不能根据患者的自身意愿进行速度调节和随时停止,从而可能会导致患者出现二次伤害的问题。
4.基于此,本发明设计了一种骨科用手肘专用康复器械,以解决上述问题。
技术实现要素:
5.本发明的目的在于提供一种骨科用手肘专用康复器械,以解决上述背景技术中提出了现有的手肘康复器械通常将人手臂绑在可以折叠的设备上,利用设备电机或者伸缩机构是的设备折叠弯曲,使得人手臂进行弯曲,从而进行康复训练,但是通过这种纯机械的长时间弯曲拉升,且受到绑带的长期束缚,极易导致患者血脉不通,从而使得患者出现麻痹的现象出现;其次通过外部机械运行,通常不能根据患者的自身意愿进行速度调节和随时停止,从而可能会导致患者出现二次伤害的问题。
6.为实现上述目的,本发明提供如下技术方案:一种骨科用手肘专用康复器械,包括两块开设有凹槽的支撑板,两个所述支撑板靠近的一端设置有滑杆,其中一组滑杆远离支撑板的一端设置有铰接板,另外一组滑杆通过销轴转动设置在铰接板中央,其中一个所述支撑板远离滑杆的一端设置有握把,所述握把侧壁固定设置有与之连通的挤压气囊,与铰接板铰接的所述滑杆侧壁固定设置有操作架,所述操作架侧壁转动设置有气缸,所述气缸另一端通过支架转动设置在铰接板下端侧壁,所述握把一端通过软管连通有用于驱动气缸伸长收缩带有气阀的气囊袋,所述气囊袋通过固定在支撑板侧壁的保护框设置在支撑板侧壁,所述气囊袋通过侧壁的软管连接到气缸上;所述滑杆轴向滑动设置在支撑板端头,所述滑杆外侧同轴螺纹链接有调节罗盘,所述调节罗盘转动设置在支撑板端头;同一块支撑板端头的所述调节罗盘外侧套设有同一根同步带。
7.作为本发明的进一步方案,两个所述支撑板侧壁一边固定设置有绑带杆,所述绑带杆侧壁固定设置有多个矩形阵列的橡胶带,所述橡胶带另一端固定设置有磁吸杆,所述磁吸杆磁力吸附接触在支撑板侧壁远离绑带杆地一边。
8.作为本发明的进一步方案,下端的所述磁吸杆侧壁固定设置有扇板,所述扇板插接在支撑板侧壁,所述扇板开设有锁止孔,所述锁止孔内滑动设置有锁杆,所述锁杆滑动设置在支撑板侧壁开设的避让孔内,所述锁杆一端固定设置有解锁杆,所述解锁杆滑动设置在支撑板内部开设的腔体内,位于解锁杆附近的所述支撑板侧壁开设有弹簧槽,所述弹簧槽内设置有套设在解锁杆外壁的锁紧弹簧,所述锁紧弹簧一端固定在弹簧槽内壁另一端固定在解锁杆外壁,作为本发明的进一步方案,所述解锁杆穿过支撑板的一端设置有压板,远离压板的所述解锁杆穿过支撑板的一端设置有可与调节罗盘外壁接触的锁止盘。
9.作为本发明的进一步方案,上端的所述磁吸杆两端均套设有锁止环,所述锁止环通过支架沿着支撑板边线滑动设置在支撑板侧壁,两个锁止环侧壁均设置有解锁齿条,两个所述解锁齿条对称啮合有同一个解锁齿轮,所述解锁齿轮外侧还啮合有触发齿条,所述触发齿条穿过保护框底端的一端固定设置在气囊袋下端面,所述气囊袋上端固定设置在保护框上端内壁。
10.作为本发明的进一步方案,所述气囊袋侧壁通过软管连通有辅助气囊。
11.作为本发明的进一步方案,所述支撑板侧壁开设有多个用于减重和通气的通孔。
12.与现有技术相比,本发明的有益效果是:1. 本发明通过患者手掌挤压挤压气囊,使得气囊袋将气压加载到气缸中,从而驱动小臂下端的支撑板转动抬升,从而对小臂和大臂进行转动锻炼,使得锻炼的转动行程完全在于患者自身的施力程度,从而有效解决了现有设备采用外部动力进行驱动,使得设备运行粗糙不细腻,不受患者自身控制,造成患者二次损伤的问题,其次患者自身手掌用力,可加快自身手臂血液循环速度,避免患者手臂长时间保持固定状态,使得血液不流通造成手臂缺血,酸麻的现象出现,其次手臂的血液加快流动,也促进了手臂的康复效果。
13.2. 通过调节调节罗盘转动,从而将滑杆端头的铰接板进行靠近或者远离支撑板的方向调节,其中调节罗盘和滑杆进行螺纹链接,一方面可在调节结束后能进行自锁的同时,另一方面可近似于无极调节,从而提高设备的使用精确性,还能适应不同人群的作用,从而使得设备能尽量适应不同手臂的长度,从而提高设备的适用性的同时,使得患者总能调节到最合适的长度,从而避免了设备使用过程中对患者的造成二次伤害的问题。
附图说明
14.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
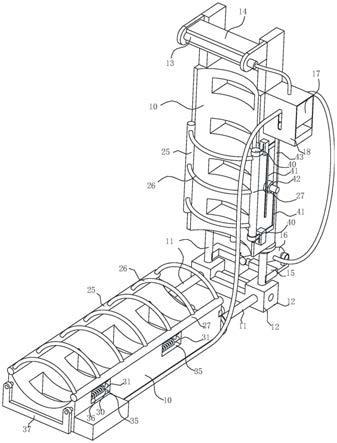
15.图1为本发明总体结构示意图;图2为本发明左前俯视总体结构示意图;图3为本发明右后俯局部剖视结构示意图;图4为本发明图3中a处放大结构示意图;图5为本发明图4中b处放大结构示意图。
16.附图中,各标号所代表的部件列表如下:支撑板10,滑杆11,铰接板12,握把13,挤压气囊14,操作架15,气缸16,气囊袋17,
保护框18,调节罗盘21,同步带22,绑带杆25,橡胶带26,磁吸杆27,扇板28,锁止孔29,锁杆30,解锁杆31,弹簧槽35,锁紧弹簧36,压板37,锁止盘38,锁止环40,解锁齿条41,解锁齿轮42,触发齿条43,触发齿条43,辅助气囊45。
具体实施方式
17.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
18.请参阅图1
‑
5,本发明提供一种技术方案:一种骨科用手肘专用康复器械,包括两块开设有凹槽的支撑板10,其特征在于:两个支撑板10靠近的一端设置有滑杆11,其中一组滑杆11远离支撑板10的一端设置有铰接板12,另外一组滑杆11通过销轴转动设置在铰接板12中央,其中一个支撑板10远离滑杆11的一端设置有握把13,握把13侧壁固定设置有与之连通的挤压气囊14,与铰接板12铰接的滑杆11侧壁固定设置有操作架15,操作架15侧壁转动设置有气缸16,气缸16另一端通过支架转动设置在铰接板12下端侧壁,握把13一端通过软管连通有用于驱动气缸16伸长收缩带有气阀的气囊袋17,气囊袋17通过固定在支撑板10侧壁的保护框18设置在支撑板10侧壁,气囊袋17通过侧壁的软管连接到气缸16上;滑杆11轴向滑动设置在支撑板10端头,滑杆11外侧同轴螺纹链接有调节罗盘21,调节罗盘21转动设置在支撑板10端头;同一块支撑板10端头的调节罗盘21外侧套设有同一根同步带22;本发明使用时,先将本装置组装完毕,(如图1所示,图上向下看为本装置的顶端,图左下向右上方看为本发明的前端,本装置初期使用时两个支撑板10为一前一后平行放置),本发明使用时,先将手臂放置到两个支撑板10上,保持大臂和小臂分别处于两个支撑板10上(其中支撑板10上端开设的凹槽,可保持手臂处于支撑板10中间位置),使得大臂小臂的弯曲点位于铰接板12上端,同时保证手掌握住挤压气囊14和握把13;康复训练时,使用手掌握住挤压气囊14,向握把13握持,从而使得挤压气囊14体积减小,挤压气囊14体积减小从而将内部空气通过握把13端头的软管挤压到气囊袋17中,气囊袋17开始向气缸16内充气(如图1所示),气缸16开设缓慢伸长,且伸长量根据患者自身对挤压气囊14施加力,气缸16伸长将操作架15向外顶起,操作架15再驱动滑杆11绕着铰接板12的铰接点转动升起,滑杆11转动升起从而带动小臂的支撑板10缓慢升起(如图1和2所示,支撑板10转动升起从而驱动小臂缓慢转动抬升,从而使得大臂与小臂之间出现转动,开始康复训练,由于患者对气囊的挤压,从而使得小臂进行转动抬升,从而能自己对锻炼的转动行程进行控制,避免了外部动力施加,从而导致患者不可控,对患者造成二次伤害的问题);其次气囊袋17本身带有阀体,根据患者自身锻炼的角度可进行压力调节,当压力设置后,气缸16驱动支撑板10转动到训练角度后气缸16不再伸长且进行泄气进行复位,其次多次挤压挤压气囊14多次对气缸16注入气体,从而使得气缸16有一个缓慢进阶注入气体的过程,避免患者手掌压力过大,出现患者疲劳的现象,其次通过患者手掌自身的运动,从而使得患者手臂血液流速加快,从而促进患者的康复效果,从而完成往复锻炼工作;本装置还设置有两种锻炼方式;第一种,患者小臂无法进行施力时,可通过手掌挤压挤压气囊14,使得小臂下端的
支撑板10进行转动上升,从而对患者手肘进行锻炼,避免了外部动力机构参与,使得设备的运行状态运行过于粗糙,不可进行细微控制,从而导致患者出现二次受伤的现象出现;第二种,随着患者康复情况越来越好,患者自身小臂已经能进行自身力量控制时,患者手掌首先会挤压挤压气囊14对气囊袋17进行初步充气,使得气缸16先对小臂下方的支撑板10有个初步转动抬升(如图1和2所示),再握住握把13使用小臂将支撑板10进行抬升(初始的抬升转动,水平的支撑板10由受力角度分析可知,小臂转动初期会对支撑板10施加一个水平和向上地力,水平角度地力正好会顶在铰接板12侧壁,从而需要小臂施加更大的力从而才能将小臂下端的支撑板10抬起,避免小臂直接对水平的支撑板10进行施加转动力矩,对患者造成二次伤害的问题),其次在进行小臂自主锻炼时,气缸16内部会产生负压,这部分负压只能通过气囊袋17上的泄压阀进行缓慢释放,从而起到对小臂的锻炼;从而进一步促进患者手臂自身的血液循环,加快患者的康复效率;其次随着不同患者的使用,或者在患者使用过程中,可能会出现不匹配患者手臂长度的现象出现,这时只需要调节调节罗盘21转动,调节罗盘21转动会通过同步带22驱动同一个支撑板10端头的另一个调节罗盘21转动,从而将滑杆11端头的铰接板12进行靠近或者远离支撑板10的方向调节(如图1和2所示,其中调节罗盘21和滑杆11进行螺纹链接,一方面可在调节结束后能进行自锁的同时,另一方面可近似于无极调节,从而提高设备的使用精确性,还能适应不同人群的作用),从而使得设备能尽量适应不同手臂的长度,从而提高设备的适用性的同时,使得患者总能调节到最合适的长度,从而避免了设备使用过程中对患者的造成二次伤害的问题;本发明通过患者手掌挤压挤压气囊14,使得气囊袋17将气压加载到气缸16中,从而驱动小臂下端的支撑板10转动抬升,从而对小臂和大臂进行转动锻炼,使得锻炼的转动行程完全在于患者自身的施力程度,从而有效解决了现有设备采用外部动力进行驱动,使得设备运行粗糙不细腻,不受患者自身控制,造成患者二次损伤的问题,其次患者自身手掌用力,可加快自身手臂血液循环速度,避免患者手臂长时间保持固定状态,使得血液不流通造成手臂缺血,酸麻的现象出现,其次手臂的血液加快流动,也促进了手臂的康复效果。
19.作为本发明的进一步方案,两个支撑板10侧壁一边固定设置有绑带杆25,绑带杆25侧壁固定设置有多个矩形阵列的橡胶带26,橡胶带26另一端固定设置有磁吸杆27,磁吸杆27磁力吸附接触在支撑板10侧壁远离绑带杆25的一边;通过绑带杆25和橡胶带26,再通过磁吸杆27作用,可将手臂绑缚到支撑板10上端,避免锻炼时,手臂脱离设备,从而造成锻炼动作不标准,从而导致手臂恢复出现畸形的问题出现,其次也方便了快拆,在患者出现意外时能快速脱离设备进行急救,避免设备对患者造成二次损伤的问题。
20.作为本发明的进一步方案,下端的磁吸杆27侧壁固定设置有扇板28,扇板28插接在支撑板10侧壁,扇板28开设有锁止孔29,锁止孔29内滑动设置有锁杆30,锁杆30滑动设置在支撑板10侧壁开设的避让孔内,锁杆30一端固定设置有解锁杆31,解锁杆31滑动设置在支撑板10内部开设的腔体内;位于解锁杆31附近的支撑板10侧壁开设有弹簧槽35,弹簧槽35内设置有套设在解锁杆31外壁的锁紧弹簧36,锁紧弹簧36一端固定在弹簧槽35内壁另一端固定在解锁杆31外壁,作为本发明的进一步方案,解锁杆31穿过支撑板10的一端设置有压板37,远离压板37的解锁杆31穿过支撑板10的一端设置有可与调节罗盘21外壁接触的锁
止盘38;在患者锻炼时由于手臂受到弯曲,从而使得患者身体自动靠近设备,从而挤压压板37,使得压板37带动解锁杆31克服锁紧弹簧36的力向铰接板12移动(如图1、4和5所示,锁紧弹簧36平时受到弹簧槽35作用,始终保持解锁杆31处于设备的前端),解锁杆31移动带动锁杆30插入扇板28侧壁的锁止孔29,将扇板28锁定在支撑板10侧壁,扇板28再将磁吸杆27固定在支撑板10侧壁,同时解锁杆31端头的锁止盘38也与调节罗盘21外侧接触,从而对锁止盘38锁止,避免设备大臂下端的支撑板10和滑杆11出现滑动,使得大臂下端的支撑板10和铰接板12出现位移,从而导致患者大臂出现挤压,造成患者二次受伤问题,从而避免了患者锻炼过程中造成磁吸杆27掉落的问题出现,且患者手臂形变量越大,身体约靠近压板37,从而使得磁吸杆27锁止得越紧,在设备复位时,或者患者自身出现不适,本能会远离设备,这时锁紧弹簧36会推动解锁杆31带动锁杆30移动脱离对扇板28锁止,从而瞬间对设备进行解锁,从而避免了设备对患者进行锁止,无法快速拆卸,造成患者二次受伤的现象出现。
21.作为本发明的进一步方案,上端的磁吸杆27两端均套设有锁止环40,锁止环40通过支架沿着支撑板10边线滑动设置在支撑板10侧壁,两个锁止环40侧壁均设置有解锁齿条41,两个解锁齿条41对称啮合有同一个解锁齿轮42,解锁齿轮42外侧还啮合有触发齿条43,触发齿条43穿过保护框18底端的一端固定设置在气囊袋17下端面,气囊袋17上端固定设置在保护框18上端内壁;本发明使用时,如图1和3所示,在患者进行锻炼初始时,气囊袋17体积增大在保护框18内向下移动,从而驱动触发齿条43下移,触发齿条43下移驱动解锁齿轮42转动,解锁齿轮42转动再驱动两侧的解锁齿条41向解锁齿轮42移动,从而带动解锁齿条41端头的锁止环40向中间移动,从而将小臂固定用的磁吸杆27两端套住,从而完成小臂橡胶带26的固定,在进行复位或者突发情况时,只需刺破气囊袋17即可完成小臂解锁,从而避免了设备对患者进行锁止,无法快速拆卸,造成患者二次受伤的现象出现。
22.作为本发明的进一步方案,气囊袋17侧壁通过软管连通有辅助气囊45;在患者需要锻炼的手掌无法施力时,可通过另外一只手进行自主操作,从而提高设备的适用性。
23.作为本发明的进一步方案,支撑板10侧壁开设有多个用于减重和通气的通孔;使得患者手臂通风的同时,方便设备的转动。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。