1.本发明涉及气象监测技术领域,特别是一种基于频闪照片的雨滴检测算法。
背景技术:
2.雨滴谱仪是一种常见的气象监测设备,传统的雨滴谱仪采用激光检测方法,具有一定的局限性。随着摄影装备与图像处理技术的发展和普及,基于图像处理的雨滴谱仪可以更加直观、精准地获得雨滴的图像,并通过图像处理及统计方法获得高效、精准的雨滴谱数据。一种基于图像处理的雨滴谱仪采用频闪照片作为数据采集与分析的基础,如何通过高效、精准的图像处理算法识别照片中的雨滴并对雨滴数据分析处理获得,是决定这种雨滴谱仪性能的关键。
3.目前基于图像处理的目标识别技术已经非常成熟并广泛应用于生产生活中。但应用到雨滴检测中存在很多特殊性。雨滴作为透明的物体,对其抓拍的照片,背景、光照、灰尘等环境噪声的影响很大;雨滴作为一种高速运动的目标,且受风速、风向、降雨量大小等情况的影响,对其抓拍的照片具有很大的随机性;采用频闪拍照的方式所获得的雨滴照片,每个雨滴都会留下多个影像;一般的图像处理算法没有同时考虑这些复杂情况,因此雨滴半径和雨滴下落速度等参数的计算误差大,可靠性低。
技术实现要素:
4.本发明要解决的技术问题是针对上述现有技术的不足,而提供一种基于频闪照片的雨滴检测算法,该基于频闪照片的雨滴检测算法能够解决背景、光照、灰尘等环境噪声的影响,以及易受风速、风向、降雨量大小等影响情况,雨滴直径及速度检测数据准确、可靠。
5.为解决上述技术问题,本发明采用的技术方案是:
6.一种基于频闪照片的雨滴检测算法,包括如下步骤。
7.步骤1、拍摄雨滴图像:工业相机和频闪光源启动,频闪光源对进入雨滴测量孔中的雨滴进行频闪补光,并使进入雨滴测量孔中的雨滴在黑色背景板上进行成像;工业相机的远心镜头对黑色背景板上的成像进行拍摄,形成雨滴图像。
8.步骤2、图像预处理,具体包括如下步骤。
9.步骤2a、杂波滤除:将步骤1拍摄形成的雨滴图像进行杂波滤除。
10.步骤2b、锐化处理:将步骤2a杂波滤除后的雨滴图像,进行二值化的锐化处理。
11.步骤2c、建立二维坐标系:对步骤2b锐化处理后的雨滴图像,以左上角点为坐标原点o,以雨滴图像的顶边为x向,以雨滴图像的左侧边为y向,建立xoy的二维坐标系;二维坐标系中,雨滴图像的每个像素值的x向和y向长度均为1。
12.步骤3、获取n段序列及m个影像点:从坐标原点o开始,按照从左至右、从上至下的顺序,对具有二维坐标系的雨滴图像中的像素值进行逐个扫描遍历一次,得到n段序列和第i段序列位置信息[i,(x
si
,y
si
),(x
ei
,y
ei
)];其中,1≤i≤n;(x
si
,y
si
)为第i段序列起始像素值对应的起始坐标;(x
ei
,y
ei
)为第i段序列起始像素值对应的结束坐标;其中,y
si
=y
ei
;在获
取n段序列的同时,进行影像点的建立,共得到m个影像点;每个影像点中的段序列需要满足:x向坐标有重叠,y向坐标为 1递增的关系;每个影像点中的所有段序列的起始和结束坐标构成对应影像点的轮廓。
[0013]
步骤4、获取每个影像点中心坐标及影像点直径:根据步骤3中得到的每个影像点的轮廓,计算每个影像点中心坐标及影像点直径。
[0014]
步骤5、获取雨滴的关联影像点:采用目标关联算法,遍历每个影像点中心坐标及对应影像点直径,将位于同一竖向直线、直径接近且等距的影像点相关联,作为同一个雨滴的关联影像点;每个雨滴的关联影像点需不少于3个。
[0015]
步骤6、计算雨滴直径:雨滴直径为对应雨滴所有关联影像点的平均直径。
[0016]
步骤7、计算雨滴下落速度v,具体计算公式为:v=s f;其中,f为频闪光源的频闪频率;s为对应雨滴所有关联影像点的平均间距。
[0017]
步骤3中,n段序列及m个影像点的获取方法,包括如下步骤。
[0018]
步骤31、像素值扫描遍历:从坐标原点o开始,按照从左至右、从上至下的顺序,对具有二维坐标系的雨滴图像中的像素值进行逐个扫描遍历。
[0019]
步骤32、获取第1段序列和第1影像点:在雨滴图像的第一行中,当第一次遇到像素值由0变成1时,此时的像素值1为第1段序列的起始像素值,并记录第1段序列起始像素值对应的起始坐标(x
s1
,y
s1
);继续遍历,在雨滴图像的第一行中,当第一次遇到像素值由1变成0时,此时的像素值1为第1段序列的结束像素值,并记录第1段序列结束像素值对应的结束坐标(x
e1
,y
e1
);故而,得到第1段序列位置信息[1,(x
s1
,y
s1
),(x
e1
,y
e1
)],并将第1段序列记录为第1影像点。
[0020]
步骤33、获取第2段序列和第2个影像点:第1段序列获取后,继续像素值遍历,在雨滴图像的第一行或第二行中,当遇到像素值由0变成1时,此时的像素值1为第2段序列的起始像素值,并记录第2段序列起始像素值对应的起始坐标(x
s2
,y
s2
);继续遍历,在雨滴图像的同一行中,当遇到像素值由1变成0时,此时的像素值1为第2段序列的结束像素值,并记录第2段序列结束像素值对应的结束坐标(x
e2
,y
e2
);故而,得到第2段序列位置信息[2,(x
s2
,y
s2
),(x
e2
,y
e2
)];判断第2段序列是否属于第1影像点,判断方法为:当第2段序列的x向坐标(x
s2
,x
e2
)与第1段序列的x向坐标(x
s1
,x
e1
)有重叠,且y
s2
‑
y
s1
=1时,第2段序列属于第1影像点,否则第2段序列记录为第2个影像点。
[0021]
步骤34、获取第i段序列和第j个影像点:第2段序列获取后,继续像素值遍历,在雨滴图像的某一行中,当遇到像素值由0变成1时,此时的像素值1为第i段序列的起始像素值,并记录第i段序列起始像素值对应的起始坐标(x
si
,y
si
);其中,2≤i≤n;继续遍历,在雨滴图像的同一行中,当遇到像素值由1变成0时,此时的像素值1为第i段序列的结束像素值,并记录第i段序列结束像素值对应的结束坐标(x
ei
,y
ei
);故而,得到第i段序列位置信息[i,(x
si
,y
si
),(x
ei
,y
ei
)];假设第i
‑
1段序列属于第j
‑
1影像点,则需判断第i段序列是否属于第j
‑
1影像点,具体判断方法为:当第i段序列的x向坐标与前j
‑
1影像点中任意一个影像点的最后一段序列的x向坐标有重叠,且y向坐标加1时,第i段序列属于前j
‑
1影像点中的对应影像点,否则第i段序列记录为第j个影像点。
[0022]
步骤35、获取第n段序列:继续像素值遍历,直至一次遍历完成,共得到n段序列和m个影像点;其中,第n段序列位置信息为[n,(x
sn
,y
sn
),(x
en
,y
en
)],每个影像点中的所有段序
列的起始和结束坐标构成对应影像点的轮廓。
[0023]
步骤4中,假设第j个影像点共包括a段序列,中心坐标为(x
j
,y
j
),直径为d
j
,其中,1≤j≤m;则x
j
、y
j
和d
j
的计算公式分别为:
[0024][0025][0026][0027]
式中,k为a段序列中的第k段序列,1≤k≤a,且第k段序列位置信息为[k,(x
sk
,y
sk
),(x
ek
,y
ek
)];x
j
、y
j
和d
j
获取后,第j个影像点位置信息记录为[j,(x
j
,y
j
),d
j
]。
[0028]
步骤5中,采用目标关联算法,获取雨滴关联影像点的方法,包括如下步骤:
[0029]
步骤51、输入第1影像点,并将第1影像点作为第一频闪带线的第1个点。
[0030]
步骤52、输入第2影像点,并判断第2影像点是否为第一频闪带线上的关联影像点,具体判断方法为:
[0031]
条件一:第2影像点的直径与第1影像点的直径相近。
[0032]
条件二:第2影像点的中心与第1影像点的中心连线与竖直方向的夹角小于30
°
。
[0033]
当条件一和条件二同时满足时,则第2影像点为第一频闪带线上的关联影像点,并计算第2影像点与第1影像点的间距d;否则,将第2影像点作为第二频闪带线的第1个点。
[0034]
步骤53、输入第l影像点,3≤l≤m,并判断第l影像点是否为已有频闪带线上的关联影像点,具体判断方法为:
[0035]
步骤53a:第l影像点的直径与已有频闪带线h上影像点的直径相近。
[0036]
步骤53b:步骤53a满足后,按照如下步骤进行判断:
[0037]
(1)若已有频闪带线h上只有一个影像点,第l影像点中心与已有频闪带线h上已有影像点的中心连线与竖直方向的夹角小于30
°
,则将第l影像点作为已有频闪带线h上的关联影像点。
[0038]
(2)若已有频闪带线h上只有一个影像点,第l影像点中心与已有频闪带线h上已有影像点的中心连线与竖直方向的夹角超过30
°
,则将第l影像点作为新频闪带线上的第一个影像点。
[0039]
(3)若已有频闪带线h上至少有两个间距为d的影像点,第l影像点中心位于频闪带线h上且与频闪带线h上相邻影像点的间距为d,则将第l影像点作为已有频闪带线h上的关联影像点。
[0040]
(4)若已有频闪带线h上至少有两个间距为d的影像点,第l影像点中心不位于频闪带线h上或第l影像点中心位于频闪带线h上但与频闪带线h上相邻影像点的间距不为d,则将第l影像点作为新频闪带线上的第一个影像点。
[0041]
步骤54、按照步骤53的方法,遍历所有影像点,直至m个影像点全部遍历完成,共得到若干条频闪带线。
[0042]
步骤55、统计步骤54得到的每条频闪带线中关联影像点的数量,将关联影像点数量低于3个的频闪带线全部删除,进而得到关联影像点不少于3个的频闪带线,一条频闪带线对应一个雨滴。
[0043]
步骤53b(3)中,当已有频闪带线h上至少有两个间距为d的影像点,且最后两个影像点的中心坐标分别为(x
l
‑2,y
l
‑2)和(x
l
‑1,y
l
‑1),第l影像点的中心坐标为(x
l
,y
l
);当x
l
和y
l
同时满足如下要求:
[0044]
2x
l
‑1=x
l
‑2 x
l
[0045]
2y
l
‑1=y
l
‑2 y
l
[0046]
则第l影像点为已有频闪带线h上的关联影像点。
[0047]
步骤5中,频闪光源的频闪频率f为200hz,每个雨滴的关联影像点均为4个。
[0048]
还包括步骤8、计算当地风速v
x
,具体计算公式为:v
x
=s
x
f;其中,f为频闪光源的频闪频率;s
x
为对应雨滴中相邻两个关联影像点的x向偏移距离。
[0049]
本发明具有如下有益效果:
[0050]
1、本技术中,带有远心镜头的工业相机、电源、频闪光源、控制器和黑色背景板均嵌入式集成在雨滴测量箱中,体积小,结构简单,适用性强。
[0051]
2、由于雨滴落到地面时的速度为匀速,且通常不大于10m/s。在本技术中,频闪光源的频闪频率f大于200hz,使得即便在10m/s的雨滴速度下,也能够保证拍摄的每张照片中每个雨滴具有最少4个影像点。根据每个雨滴的影像点不小于四个,故而雨滴的半径和下落速度能够准确测量,测量精度高,测试数据可靠,误差小。
[0052]
3、频闪光源包括若干个同心等距设置且颜色各异的环形灯带,故而拍摄的每张照片中每个雨滴的影像点的rgb值高,清晰度高,进一步使得雨滴的半径和下落速度能够准确测量,测量精度高,测试数据可靠,误差小。
[0053]
4、本技术中雨滴测量孔均位于远心镜头的物距范围之内,故而落入雨滴测量孔中的雨滴均能够被远心镜头准确捕捉,测试准确度高,测试的雨滴范围大。
[0054]
5、本发明基于频闪照片的雨滴检测算法和基于雨滴数据的谱分析算法。其中雨滴检测算法包括杂波滤除与图像锐化、目标检测与定位分析两个步骤。先通过杂波滤除和图像锐化,将原始的照片处理为目标清晰、数据结构简单的图像数据。再通过边缘检测与定位分析等方法将图像中每一个雨滴的坐标位置、直径大小计算出来。从而解决了背景、光照、灰尘等环境噪声的影响,以及易受风速、风向、降雨量大小等影响情况,雨滴直径及速度检测数据准确、可靠。
附图说明
[0055]
图1为本发明一种嵌入式雨滴谱仪装置的俯视图。
[0056]
图2为本发明一种嵌入式雨滴谱仪装置的正视图。
[0057]
图3为本发明中频闪光源的布设位置示意图。
[0058]
图4为拍摄图像中同一个雨滴的图像处理过程示意图。其中,图a表示拍摄的原始图像,图b表示杂波滤除后的图像,图c表示轮廓检测后的图像,图d表示定位分析后的图像。
[0059]
图5显示了雨滴目标检测流程示意图。
[0060]
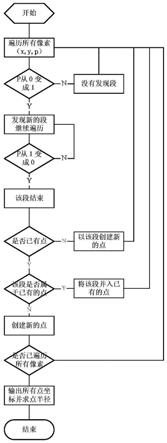
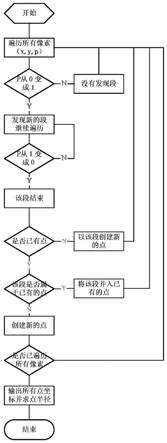
图6显示了目标关联算法流程示意图。
[0061]
图7显示了建立的二维坐标系示意图。
[0062]
其中有:
[0063]1‑
工业相机;2
‑
远心镜;3
‑
雨滴测量箱;4
‑
雨滴测量孔;
[0064]5‑
频闪光源;51
‑
白色灯带;52
‑
红色灯带;53
‑
绿色灯带;54
‑
蓝色灯带;
[0065]6‑
黑色背景板;7
‑
电源;8
‑
控制器;
[0066]
91
‑
第一影像点;92
‑
第二影像点;93
‑
第三影像点;94
‑
第四影像点。
具体实施方式
[0067]
下面结合附图和具体较佳实施方式对本发明作进一步详细的说明。
[0068]
本发明的描述中,需要理解的是,术语“左侧”、“右侧”、“上部”、“下部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,“第一”、“第二”等并不表示零部件的重要程度,因此不能理解为对本发明的限制。本实施例中采用的具体尺寸只是为了举例说明技术方案,并不限制本发明的保护范围。
[0069]
如图1所示,一种嵌入式雨滴谱仪装置,包括雨滴测量箱3、工业相机1、频闪光源5、雨滴测量孔4、黑色背景板6、电源7、控制器8和监控设备。
[0070]
黑色背景板6安装在雨滴测量箱3其中一个侧壁的内壁面;本实施例中,优选安装在右侧壁的内壁面。黑色背景板优选采用树脂丙烯颜料制成。
[0071]
雨滴测量箱3优选为长方形的箱体,在雨滴测量箱3的左侧内腔中优选插设有光源安装板,光源安装板将雨滴测量箱3优选分隔为仪器容纳腔和雨滴测量腔。
[0072]
雨滴测量孔4邻近黑色背景板6设置,且贯穿雨滴测量箱(也即雨滴测量腔)的顶板和底板。雨滴测量孔4优选为边长为20cm的方形孔。
[0073]
工业相机1安装在与黑色背景板6相对的雨滴测量箱3的侧壁上,且位于黑色背景板6的中心轴线上。本实施例中,工业相机1优选安装在雨滴测量箱3的左侧内壁中心,且位于仪器容纳腔中。
[0074]
工业相机1具有正对黑色背景板6的远心镜头2,远心镜头2穿过并架设在光源安装板的中心。
[0075]
远心镜头的物距范围为30
‑
40cm,从而使得雨滴测量孔4的正中心位于远心镜头2的物距范围之内。在本实施例中,远心镜头为变物距镜头,具有40cm的最大物距和30cm的最小物距。
[0076]
方形的雨滴测量孔具有均平行于黑色背景板的近端侧壁和远端侧壁;近端侧壁至远心镜头的距离小于或等于最小物距,远端侧壁至远心镜头的距离等于或大于最大物距。当雨滴竖直下落时,近端侧壁至远心镜头的距离可以直接等于最小物距,远端侧壁至远心镜头的距离可以直接等于最大物距。然而,由于受风的影响,大部分雨滴下落时均具有一定的倾斜方向,为增加雨滴进入雨滴测量孔的概率,故而使得雨滴测量孔的边长大于最大物距和最小物距的差值。在本实施例中,雨滴测量孔的边长为20cm,最大物距和最小物距的差值为10cm,也即雨滴测量孔以远心镜头的中心物距为基础,近端侧壁和远端侧壁左右对称地各增加了5cm。
[0077]
远心镜头2的外周呈同心环式安装有多种颜色的频闪光源5。
[0078]
通过控制频闪光源的频闪频率,能够控制远心镜头拍摄的每张图片中同一雨滴的影像点数量。由于雨滴落到地面时的速度为匀速,且通常不大于10m/s。故而在本技术中,频闪光源的频闪频率f大于200hz,使得即便在10m/s的雨滴速度下,也能够保证拍摄的每张照片中每个雨滴具有最少4个影像点。根据每个雨滴的影像点不小于四个,故而雨滴的半径和下落速度能够准确测量,测量精度高,测试数据可靠,误差小。
[0079]
进一步,频闪光源包括若干个同心等距设置且颜色各异的环形灯带。进一步,环形灯带的数量为四个,四个环形灯带从外至内分别为白色灯带51、红色灯带52、绿色灯带53和蓝色灯带54。
[0080]
通常情况下,默认只使用白色灯带。当发现以下情况时,设备判定雨量较大,关闭白色灯带使用红、绿、蓝三色环形灯带同时闪烁,从而使得拍摄的每张照片中每个雨滴的影像点的rgb值高,清晰度高,进一步使得雨滴的半径和下落速度能够准确测量,测量精度高,测试数据可靠,误差小。
[0081]
a、单张照片中的雨滴个数超过10个,即影像数超过40个。
[0082]
b、每秒拍摄一张照片,每分钟有不少于10张照片中,存在雨滴间距小于10mm的情况。
[0083]
电源7和控制器8均内置在雨滴测量箱的仪器容纳腔中,每个环形灯带均通过一个切换开关与电源相连接。由于每个环形灯带均有一个独立的切换开关所控制,故而每个环形灯带均能独立开启和关闭,独立工作。
[0084]
进一步,雨滴测量箱上设置有防水的供电接口和网口。其中,供电接口用于向电源充电;工业相机和电源均与控制器相连接,控制器的型号优选为pqcj228,控制器还通过网口与监控设备实现无线或有线连接。
[0085]
测量前,将基于频闪照片的雨滴检测算法放置在待测量区域的地面上,雨滴将从顶板处的雨滴测量孔落入雨滴测量腔中,并从底板开口流走,不会聚集在雨滴测量腔中。
[0086]
随后,开启电源和控制器,电源为频闪光源和工业相机供电,频闪光源的频闪频率f大于200hz。本实施例中,频闪光源的频闪频率f=200hz,从而使得拍摄的每张照片中每个雨滴具有4~5个影像点,优选4个影像点。
[0087]
如图5和图6所示,一种基于频闪照片的雨滴检测算法,包括如下步骤。
[0088]
步骤1、拍摄雨滴图像:工业相机和频闪光源启动,频闪光源对进入雨滴测量孔中的雨滴进行频闪补光,并使进入雨滴测量孔中的雨滴在黑色背景板上进行成像;工业相机的远心镜头对黑色背景板上的成像进行拍摄,形成雨滴图像。
[0089]
步骤2、图像预处理,具体包括如下步骤。
[0090]
步骤2a、杂波滤除:将步骤1拍摄形成的雨滴图像进行杂波滤除。
[0091]
步骤2b、锐化处理:将步骤2a杂波滤除后的雨滴图像,进行二值化的锐化处理。
[0092]
步骤2c、建立二维坐标系:对步骤2b锐化处理后的雨滴图像,以左上角点为坐标原点o,以雨滴图像的顶边为x向,以雨滴图像的左侧边为y向,建立xoy的二维坐标系,如图7所示;二维坐标系中,雨滴图像的每个像素值的x向和y向长度均为1。
[0093]
步骤3、获取n段序列及m个影像点:从坐标原点o开始,按照从左至右、从上至下的顺序,对具有二维坐标系的雨滴图像中的像素值进行逐个扫描遍历一次,得到n段序列和第i段序列位置信息[i,(x
si
,y
si
),(x
ei
,y
ei
)];其中,1≤i≤n;(x
si
,y
si
)为第i段序列起始像素
值对应的起始坐标;(x
ei
,y
ei
)为第i段序列起始像素值对应的结束坐标;其中,y
si
=y
ei
;在获取n段序列的同时,进行影像点的建立,共得到m个影像点;每个影像点中的段序列需要满足:x向坐标有重叠,y向坐标为 1递增的关系;每个影像点中的所有段序列的起始和结束坐标构成对应影像点的轮廓。
[0094]
上述n段序列及m个影像点的获取方法,具体包括如下步骤。
[0095]
步骤31、像素值扫描遍历:从坐标原点o开始,按照从左至右、从上至下的顺序,对具有二维坐标系的雨滴图像中的像素值进行逐个扫描遍历。
[0096]
步骤32、获取第1段序列和第1影像点:在雨滴图像的第一行中,当第一次遇到像素值由0变成1时,此时的像素值1为第1段序列的起始像素值,并记录第1段序列起始像素值对应的起始坐标(x
s1
,y
s1
);继续遍历,在雨滴图像的第一行中,当第一次遇到像素值由1变成0时,此时的像素值1为第1段序列的结束像素值,并记录第1段序列结束像素值对应的结束坐标(x
e1
,y
e1
);故而,得到第1段序列位置信息[1,(x
s1
,y
s1
),(x
e1
,y
e1
)],并将第1段序列记录为第1影像点。
[0097]
步骤33、获取第2段序列和第2个影像点:第1段序列获取后,继续像素值遍历,在雨滴图像的第一行或第二行中,当遇到像素值由0变成1时,此时的像素值1为第2段序列的起始像素值,并记录第2段序列起始像素值对应的起始坐标(x
s2
,y
s2
);继续遍历,在雨滴图像的同一行中,当遇到像素值由1变成0时,此时的像素值1为第2段序列的结束像素值,并记录第2段序列结束像素值对应的结束坐标(x
e2
,y
e2
);故而,得到第2段序列位置信息[2,(x
s2
,y
s2
),(x
e2
,y
e2
)];判断第2段序列是否属于第1影像点,判断方法为:当第2段序列的x向坐标(x
s2
,x
e2
)与第1段序列的x向坐标(x
s1
,x
e1
)有重叠,且y
s2
‑
y
s1
=1时,第2段序列属于第1影像点,否则第2段序列记录为第2个影像点。
[0098]
步骤34、获取第i段序列和第j个影像点:第2段序列获取后,继续像素值遍历,在雨滴图像的某一行中,当遇到像素值由0变成1时,此时的像素值1为第i段序列的起始像素值,并记录第i段序列起始像素值对应的起始坐标(x
si
,y
si
);其中,2≤i≤n;继续遍历,在雨滴图像的同一行中,当遇到像素值由1变成0时,此时的像素值1为第i段序列的结束像素值,并记录第i段序列结束像素值对应的结束坐标(x
ei
,y
ei
);故而,得到第i段序列位置信息[i,(x
si
,y
si
),(x
ei
,y
ei
)];假设第i
‑
1段序列属于第j
‑
1影像点,则需判断第i段序列是否属于第j
‑
1影像点,具体判断方法为:当第i段序列的x向坐标与前j
‑
1影像点中任意一个影像点的最后一段序列的x向坐标有重叠,且y向坐标加1时,第i段序列属于前j
‑
1影像点中的对应影像点,否则第i段序列记录为第j个影像点。
[0099]
步骤35、获取第n段序列:继续像素值遍历,直至一次遍历完成,共得到n段序列和m个影像点;其中,第n段序列位置信息为[n,(x
sn
,y
sn
),(x
en
,y
en
)],每个影像点中的所有段序列的起始和结束坐标构成对应影像点的轮廓。
[0100]
步骤4、获取每个影像点中心坐标及影像点直径:根据步骤3中得到的每个影像点的轮廓,计算每个影像点中心坐标及影像点直径。
[0101]
假设第j个影像点共包括a段序列,中心坐标为(x
j
,y
j
),直径为d
j
,其中,1≤j≤m;则x
j
、y
j
和d
j
的计算公式分别为:
[0102][0103][0104][0105]
式中,k为a段序列中的第k段序列,1≤k≤a,且第k段序列位置信息为[k,(x
sk
,y
sk
),(x
ek
,y
ek
)];x
j
、y
j
和d
j
获取后,第j个影像点位置信息记录为[j,(x
j
,y
j
),d
j
]。
[0106]
本实施例中,假设第1影像点包括a=9段序列,中心坐标为(x1,y1),直径为d1,其中,9段序列的位置信息分别为:
[0107]
[1,(8,5),(12,5)]
[0108]
[2,(7,6),(13,6)]
[0109]
[3,(6,7),(14,7)]
[0110]
[4,(6,8),(14,8)]
[0111]
[5,(6,9),(14,9)]
[0112]
[6,(6,10),(14,10)]
[0113]
[7,(6,11),(14,11)]
[0114]
[8,(7,12),(13,12)]
[0115]
[9,(6,13),(12,13)]
[0116]
故而,按照上述计算公式,计算得到x1=10,y1=9,直径d1=9。
[0117]
上述步骤1至步骤4,为雨滴目标检测流程。
[0118]
步骤5、获取雨滴的关联影像点:采用如图6所示的目标关联算法,遍历每个影像点中心坐标及对应影像点直径,将位于同一竖向直线、直径接近且等距的影像点相关联,作为同一个雨滴的关联影像点;每个雨滴的关联影像点需不少于3个。在本实施例中,频闪光源的频闪频率f优选为200hz,每个雨滴的关联影像点均为4个。
[0119]
上述采用目标关联算法,获取雨滴关联影像点的方法,优选包括如下步骤。
[0120]
步骤51、输入第1影像点,并将第1影像点作为第一频闪带线的第1个点。
[0121]
步骤52、输入第2影像点,并判断第2影像点是否为第一频闪带线上的关联影像点,具体判断方法为:
[0122]
条件一:第2影像点的直径与第1影像点的直径相近。
[0123]
条件二:第2影像点的中心与第1影像点的中心连线与竖直方向的夹角小于30
°
。
[0124]
当条件一和条件二同时满足时,则第2影像点为第一频闪带线上的关联影像点,并计算第2影像点与第1影像点的间距d;否则,将第2影像点作为第二频闪带线的第1个点。
[0125]
步骤53、输入第l影像点,3≤l≤m,并判断第l影像点是否为已有频闪带线上的关联影像点,具体判断方法为:
[0126]
步骤53a:第l影像点的直径与已有频闪带线h上影像点的直径相近。
[0127]
步骤53b:步骤53a满足后,按照如下步骤进行判断:
[0128]
(1)若已有频闪带线h上只有一个影像点,第l影像点中心与已有频闪带线h上已有影像点的中心连线与竖直方向的夹角小于30
°
,则将第l影像点作为已有频闪带线h上的关联影像点。
[0129]
(2)若已有频闪带线h上只有一个影像点,第l影像点中心与已有频闪带线h上已有影像点的中心连线与竖直方向的夹角超过30
°
,则将第l影像点作为新频闪带线上的第一个影像点。
[0130]
(3)若已有频闪带线h上至少有两个间距为d的影像点,第l影像点中心位于频闪带线h上且与频闪带线h上相邻影像点的间距为d,则将第l影像点作为已有频闪带线h上的关联影像点。
[0131]
如果最后两个影像点的中心坐标分别为(x
l
‑2,y
l
‑2)和(x
l
‑1,y
l
‑1),第l影像点的中心坐标为(x
l
,y
l
);也即当x
l
和y
l
需同时满足如下要求:
[0132]
2x
l
‑1=x
l
‑2 x
l
[0133]
2y
l
‑1=y
l
‑2 y
l
[0134]
则第l影像点为已有频闪带线h上的关联影像点。
[0135]
(4)若已有频闪带线h上至少有两个间距为d的影像点,第l影像点中心不位于频闪带线h上或第l影像点中心位于频闪带线h上但与频闪带线h上相邻影像点的间距不为d,则将第l影像点作为新频闪带线上的第一个影像点。
[0136]
步骤54、按照步骤53的方法,遍历所有影像点,直至m个影像点全部遍历完成,共得到若干条频闪带线。
[0137]
步骤55、统计步骤54得到的每条频闪带线中关联影像点的数量,将关联影像点数量低于3个的频闪带线全部删除,进而得到关联影像点不少于3个的频闪带线,一条频闪带线对应一个雨滴。
[0138]
步骤6、计算雨滴直径:雨滴直径为对应雨滴所有关联影像点的平均直径。
[0139]
步骤7、计算雨滴下落速度v,具体计算公式为:v=s f;其中,f为频闪光源的频闪频率;s为对应雨滴所有关联影像点的平均间距。
[0140]
步骤8、计算当地风速v
x
,具体计算公式为:v
x
=s
x
f;其中,f为频闪光源的频闪频率;s
x
为对应雨滴中相邻两个关联影像点的x向偏移距离。
[0141]
在本实施例中,由于第l影像点中心与已有频闪带线h上已有影像点的中心连线与竖直方向的夹角小于30
°
,故而当地风速v
x
将满足如下公式:vx<atan(30
°
)*f*d。
[0142]
以上详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。