1.本发明涉及输电线路杆塔沉降技术领域,具体为一种输电线路多参数物联网监测系统及方法。
背景技术:
2.输电线路基本上采用架空线路,由于线路架设在空中,需要承受自重、风力、暴雨和冰雪等机械力的作用和风沙等有害气体的侵蚀,运行条件十分恶劣。当输电线路经过沙漠地带、高岩土质区、采空区和山地滑坡区等不良地质区,在自然环境和外界条件的作用下,杆塔地基容易发生滑移、倾斜、开裂等现象,从而引起导致杆塔变形、倾斜、甚至倒塔断线。杆塔倾斜造成杆塔导地线的不平衡受力,引起杆塔受力发生变化,造成电气安全距离不够,影响线路正常运行。倒塔断线将使供电线路陷于瘫痪,严重影响人们的生产生活,造成巨大损失。
3.在杆塔倾斜现象发生发展的初期,巡线人员很难用肉眼观察到微小的变化。目前迫切需要使用智能化的数据监测装置对输电线路杆塔倾斜进行在线监测与故障分析诊断,及早发现隐患,及时排除隐患,及时排除故障,以提高输电线路运行的可靠性。
4.目前市场上,有很多针对杆塔倾斜角度进行排查验证,通过各种解决办法来提高杆塔是否倾斜的准确性,虽然市场上有沉降传感器对杆塔的沉降深度进行分析,但是并能够提前预测并要求人工进行维护检修,保证杆塔的安全性;因此,需要针对杆塔沉降问题进行改进。
技术实现要素:
5.本发明的目的在于提供一种输电线路多参数物联网监测系统及方法,以解决上述背景技术中提出的问题。
6.为了解决上述技术问题,本发明提供如下技术方案:一种输电线路多参数物联网监测系统,该系统包括三维模型构建模块、误差因素生成模块、预警巡检模块;
7.所述三维模型构建模块,获取参数构建三维模型,判断杆塔与基准台之间的距离是否产生偏移,从而导致杆塔处于沉降状态;
8.所述误差因素生成模块,获取当地地形和天气因素,根据杆塔与基准台之间的距离建立距离向量,分析当地地形和天气因素是否为造成偏移距离的原因,从而更新距离向量;
9.所述预警巡检模块,获取历史记录中受到天气影响时的距离向量,将历史记录中所保存的距离向量与所更新的距离向量相比较,分析杆塔是否会产生大幅度沉降并预警。
10.进一步的,所述三维模型构建模块包括基基准台顶部准台参数获取单元、杆塔参数获取单元、偏移距离对比单元和距离向量生成单元;
11.所述基准台参数获取单元,获取在不同时刻内的三维坐标;
12.所述杆塔参数获取单元,获取杆塔底部脚架在不同时刻内的三维坐标;
13.所述偏移距离对比单元,将所述基准台顶部在不同时刻内的三维坐标与所述杆塔底部脚架在不同时刻内的三维坐标产生的距离与预设的标准距离进行比对;从而能够判断出是否会产生偏差;
14.所述距离向量生成单元,将基准台顶部到杆塔底部脚架之间的距离作为距离向量的起始点,将未发生偏移距离变化时基准台顶部到杆塔底部脚架之间的距离作为距离向量的终点,并生成距离向量,从而能够判断出距离是否产生变化。
15.进一步的,所述误差因素生成模块包括天气因素获取单元、地形因素获取单元、方向地位确定单元、向量误差标注单元、向量生成更新单元;
16.所述天气因素获取单元,获取杆塔所处位置,分析杆塔所处位置的天气情况,判断是否会造成恶劣天气;
17.所述地形因素获取单元,根据杆塔所处位置的地形情况,判断导致恶劣天气情况的概率,分析出是否会产生泥石流或者滑坡;
18.所述方向地位确定单元,当检测到产生恶劣天气时,判断泥石流或者滑坡流向方向是否为杆塔倾斜所在方向;
19.所述向量误差标注单元,当检测到泥石流或者滑坡流向方向处于杆塔倾斜方向所在范围时,将距离向量进行标注;
20.所述向量生成更新单元,将标注的距离向量进行更新,将基准台到杆塔之间的距离作为距离向量的起始点,将发生偏移距离变化时基准台到杆塔之间的距离作为距离向量的终点。
21.进一步的,所述预警巡检模块包括历史数据获取单元、数据对比分析单元和预警提示单元;
22.所述历史数据获取单元,获取历史数据中发生泥石流或者滑坡时的距离向量;从而能够分析出当前是否需要预警并检修;
23.所述数据对比分析单元,将历史数据中所保存的距离向量与更新后的距离向量进行对比;从而分析出是否需要预警;
24.所述预警提示单元,当检测到更新后的距离向量达到预警条件时,预警并提示工作人员进行检修。
25.所述提示工作人员可通过gprs、3g、gsm和cdma网络中的任意一种方式进行通讯。
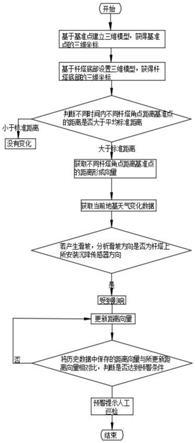
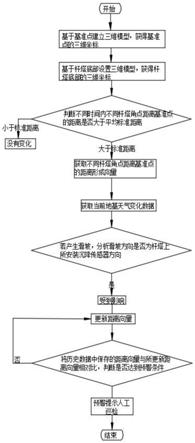
26.进一步的,一种输电线路多参数物联网监测方法,该方法包括如下步骤:
27.步骤q01:分别基于基准台和杆塔底部参数建立三维模型,并获得基准台和杆塔底部参数不同时间点的三维坐标;
28.步骤q02:根据所获取的三维坐标,分析基准台顶部与杆塔底部各脚架之间的竖直距离是否大于标准距离;若小于标准距离,则距离并没有变化;若大于标准距离,跳转到步骤q03;
29.步骤q03:将基准台到杆塔之间的距离作为距离向量的起始点,将未发生偏移距离变化时基准台到杆塔之间的距离作为距离向量的终点,并生成距离向量;
30.步骤q04:获取杆塔所处位置判断天气情况并判断产生泥石流或者滑坡的概率;当检测到概率高于预设概率时,建立二维平面模型,分析所产生泥石流或者滑坡方向是否在杆塔底部各脚架方向范围内,当确认在杆塔底部各脚架方向时,更新基准台与杆塔底部其
中一个脚架之间的竖直距离形成的距离向量,并对距离向量进行标记;
31.步骤q05:获取历史数据中发生泥石流或者滑坡时的距离向量,并与更新后的距离向量比较,分析向量形成的角度是否大于标准角度;当检测到大于标准角度时,预警并提示工作人员检修。
32.在所述步骤q01
‑
q02中,监测基准台顶部各脚在时间t={t1,t2,t3...tn}内三轴上的坐标量集合w={(a1,b1,c1),(a2,b2,c2),(a3,b3,c3),(a4,b4,c4)},监测杆塔底部各脚架在时间t^={t^1,t^2,t^3,...,t^n}内三轴上的坐标量p={(x1,y1,z1),(x2,y2,z2),(x3,y3,z3),(x4,y4,z4)};获取历史数据内基准台与杆塔底部各脚架的平均距离的集合为h={h1,h2,h3...h
j
},距离差的误差设置为wc;
33.根据公式:
[0034][0035]
当检测到距离m
k
‑
h
k
>wc时,表示杆塔底部其中一个脚架与基准台之间的距离大于标准距离,定位该脚架位置;
[0036]
其中,t
n
是指监测基准台的第n分钟,(a1,b1,c1)是指基准台第一个脚点的长、宽和高,t^n是指监测杆塔底部各脚架的第n分钟,(x1,y1,z1)是指杆塔底部第一个脚架的长、宽和高,j是指距离项数,m是指基准台顶部各脚与杆塔底部各夹角的距离,wc是指误差值。
[0037]
在所述步骤q04中,检测到产生泥石流或者滑坡的概率s大于标准概率时,获取泥石流或者滑坡在二维空间流动时实时坐标f={(w1,e1),(w2,e2)...(w
n
,e
n
)}和杆塔底部各脚架在二维平面内的坐标d={(k1,l1),(k2,l2),(k3,l3),(k4,l4)};
[0038]
设定z=gu o;
[0039]
当检测到泥石流或者滑坡的最新坐标满足上述函数时,表示泥石流或者滑坡向杆塔底部脚架位置移动,当检测到泥石流或者滑坡向所标记杆塔脚架流动时,更新基准台与所标记的杆塔底部脚架之间的距离所形成的距离向量;
[0040]
其中z是指因变量,u是指自变量,o和g是指系数,w
n
和e
n
是指泥石流或者滑坡在二维空间流动时的横坐标与纵坐标,(k1,l1),(k2,l2),(k3,l3)(k4,l4)是指杆塔底部第一个、第二个、第三个和第四个脚架的横坐标和纵坐标。
[0041]
在所述步骤q05中,设定基准台顶部各脚与杆塔底部各脚架之间的距离向量为设定基准台顶部各脚与杆塔底部各脚架之间的距离向量为获取历史数据中发生泥石流或者滑坡时基准台顶部各脚与杆塔底部各脚架之间的距离向量为
[0042]
根据公式:
[0043]
当检测到杆塔底部其中一个脚架与基准台之间的距离大于标准距离时,分析判断:
[0044][0045]
其中,β是指距离向量与距离向量之间的夹角,是指距离向量的摸,是
指距离向量的模;
[0046]
当检测到角度β大于标准角度时,表示杆塔底部其中一个脚架的沉降距离大于预设距离,同时达到历史数据预警条件,需检修报警;
[0047]
当检测到角度β小于标准角度时,表示杆塔底部其中一个脚架的沉降距离小于预设距离,表示没有达到历史数据预警条件。
[0048]
与现有技术相比,本发明所达到的有益效果是:
[0049]
通过设置三维模型分别显示基准台底脚和杆塔底部脚架在不同时间段的三维坐标,能够分析出基准台底脚和杆塔底部脚架之间的距离,分析出纵向距离是否相等;由于基准台是固定不变的,因此能够及时分析出杆塔的沉降程度;分析当前天气发生泥石流或者滑坡时的概率,当验证得到发生泥石流或者滑坡时的概率很大时,需要分析出所发生的泥石流或者滑坡流动的方向是否为杆塔底部脚架方向,从而分析出泥石流或者滑坡流动至杆塔底部脚架是否发生大幅度沉降;通过形成的距离向量与历史数据中的距离向量进行比较,分析出距离向量是否会发生异常变化,达到预警检修的条件,从而以防杆塔突然性发生大幅度的沉降导致来不及检修的问题出现。
附图说明
[0050]
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
[0051]
图1是本发明一种输电线路多参数物联网监测系统及方法的步骤示意图;
[0052]
图2是本发明一种输电线路多参数物联网监测系统及方法的模块组成示意图。
具体实施方式
[0053]
下面将结合本发明实施例中的附图,对本发明实施例中的技方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0054]
请参阅图1
‑
2,本发明提供技术方案:
[0055]
一种输电线路多参数物联网监测系统,该系统包括三维模型构建模块、误差因素生成模块、预警巡检模块;
[0056]
所述三维模型构建模块,获取参数构建三维模型,判断杆塔与基准台之间的距离是否产生偏移,从而导致杆塔处于沉降状态;
[0057]
所述误差因素生成模块,获取当地地形和天气因素,根据杆塔与基准台之间的距离建立距离向量,分析当地地形和天气因素是否为造成偏移距离的原因,从而更新距离向量;
[0058]
所述预警巡检模块,获取历史记录中受到天气影响时的距离向量,将历史记录中所保存的距离向量与所更新的距离向量相比较,分析杆塔是否会产生大幅度沉降并预警。
[0059]
进一步的,所述三维模型构建模块包括基准台参数获取单元、杆塔参数获取单元、偏移距离对比单元和距离向量生成单元;
[0060]
所述基准台参数获取单元,获取基准台顶部在不同时刻内的三维坐标;具体的三
维坐标是指长、宽和高;
[0061]
所述杆塔参数获取单元,获取杆塔底部脚架在不同时刻内的三维坐标;
[0062]
所述偏移距离对比单元,将所述基准台顶部在不同时刻内的三维坐标与所述杆塔底部脚架在不同时刻内的三维坐标产生的距离与预设的标准距离进行比对;从而能够判断出是否会产生偏差;
[0063]
所述距离向量生成单元,将基准台顶部到杆塔底部脚架之间的距离作为距离向量的起始点,将未发生偏移距离变化时基准台顶部到杆塔底部脚架之间的距离作为距离向量的终点,并生成距离向量,从而能够判断出距离是否产生变化。
[0064]
进一步的,所述误差因素生成模块包括天气因素获取单元、地形因素获取单元、方向地位确定单元、向量误差标注单元、向量生成更新单元;
[0065]
所述天气因素获取单元,获取杆塔所处位置,分析杆塔所处位置的天气情况,判断是否会造成恶劣天气;
[0066]
所述地形因素获取单元,根据杆塔所处位置的地形情况,判断导致恶劣天气情况的概率,分析出是否会产生泥石流或者滑坡;
[0067]
所述方向地位确定单元,当检测到产生恶劣天气时,判断泥石流或者滑坡流向方向是否为杆塔倾斜所在方向;
[0068]
所述向量误差标注单元,当检测到泥石流或者滑坡流向方向处于杆塔倾斜方向所在范围时,将距离向量进行标注;
[0069]
所述向量生成更新单元,将标注的距离向量进行更新,将基准台到杆塔之间的距离作为距离向量的起始点,将发生偏移距离变化时基准台到杆塔之间的距离作为距离向量的终点。
[0070]
进一步的,所述预警巡检模块包括历史数据获取单元、数据对比分析单元和预警提示单元;
[0071]
所述历史数据获取单元,获取历史数据中发生泥石流或者滑坡时的距离向量;从而能够分析出当前是否需要预警并检修;
[0072]
所述数据对比分析单元,将历史数据中所保存的距离向量与更新后的距离向量进行对比;从而分析出是否需要预警;
[0073]
所述预警提示单元,当检测到更新后的距离向量达到预警条件时,预警并提示工作人员进行检修。
[0074]
所述提示工作人员可通过gprs、3g、gsm和cdma网络中的任意一种方式进行通讯;
[0075]
其中,cdma是指码分多址,是一种崭新而成熟的无线通信技术,它可用一个带宽远大于信号带宽的高速伪随机码进行调制,能够将原数据信号的带宽被扩展,后经过调制再发送出去;
[0076]
gsm是一种可以使得全球各地都能够使用的电话网络标准,能够让用户使用一部通讯设备就能够通话。
[0077]
进一步的,一种输电线路多参数物联网监测方法,该方法包括如下步骤:
[0078]
步骤q01:分别基于基准台和杆塔底部参数建立三维模型,并获得基准台和杆塔底部参数不同时间点的三维坐标;
[0079]
步骤q02:根据所获取的三维坐标,分析基准台顶部与杆塔底部各脚架之间的竖直
距离是否大于标准距离;若小于标准距离,则距离并没有变化;若大于标准距离,跳转到步骤q03;
[0080]
步骤q03:将基准台到杆塔之间的距离作为距离向量的起始点,将未发生偏移距离变化时基准台到杆塔之间的距离作为距离向量的终点,并生成距离向量;
[0081]
步骤q04:获取杆塔所处位置判断天气情况并判断产生泥石流或者滑坡的概率;当检测到概率高于预设概率时,建立二维平面模型,分析所产生泥石流或者滑坡方向是否在杆塔底部各脚架方向范围内,当确认在杆塔底部各脚架方向时,更新基准台与杆塔底部其中一个脚架之间的竖直距离形成的距离向量,并对距离向量进行标记;
[0082]
步骤q05:获取历史数据中发生泥石流或者滑坡时的距离向量,并与更新后的距离向量比较,分析向量形成的角度是否大于标准角度;当检测到大于标准角度时,预警并提示工作人员检修。
[0083]
在所述步骤q01
‑
q02中,监测基准台顶部各脚在时间t={t1,t2,t3...tn}内三轴上的坐标量集合w={(a1,b1,c1),(a2,b2,c2),(a3,b3,c3),(a4,b4,c4)},监测杆塔底部各脚架在时间t^={t^1,t^2,t^3,...,t^n}内三轴上的坐标量p={(x1,y1,z1),(x2,y2,z2),(x3,y3,z3),(x4,y4,z4)};获取历史数据内基准台与杆塔底部各脚架的平均距离的集合为h={h1,h2,h3...h
j
},距离差的误差设置为wc;
[0084]
根据公式:
[0085][0086]
当检测到距离m
k
‑
h
k
>wc时,表示杆塔底部其中一个脚架与基准台之间的距离大于标准距离,定位该脚架位置;
[0087]
其中,t
n
是指监测基准台的第n分钟,(a1,b1,c1)是指基准台第一个脚点的长、宽和高,t^n是指监测杆塔底部各脚架的第n分钟,(x1,y1,z1)是指杆塔底部第一个脚架的长、宽和高,j是指距离项数,m是指基准台顶部各脚与杆塔底部各夹角的距离,wc是指误差值;
[0088]
通过计算m
k
能够判断出基准台顶部和杆塔底部各脚架之间的距离,能够判断出之间的距离是否超过正常值,从而分析出是否会超出正常值,由于历史数据中所保存的距离过于冗杂,数据的高低相差太多,因此,在这里将历史数据中的数据进行归一化之后再进行比较,能够突出距离具体所相差多少。
[0089]
在所述步骤q04中,检测到产生泥石流或者滑坡的概率s大于标准概率时,获取泥石流或者滑坡在二维空间流动时实时坐标f={(w1,e1),(w2,e2)...(w
n
,e
n
)}和杆塔底部各脚架在二维平面内的坐标d={(k1,l1),(k2,l2),(k3,l3),(k4,l4)};
[0090]
设定z=gu o;
[0091]
当检测到泥石流或者滑坡的最新坐标满足上述函数时,表示泥石流或者滑坡向杆塔底部脚架位置移动,当检测到泥石流或者滑坡向所标记杆塔脚架流动时,更新基准台与所标记的杆塔底部脚架之间的距离所形成的距离向量;
[0092]
其中z是指因变量,u是指自变量,o和g是指系数,w
n
和e
n
是指泥石流或者滑坡在二维空间流动时的横坐标与纵坐标,(k1,l1),(k2,l2),(k3,l3)(k4,l4)是指杆塔底部第一个、第二个、第三个和第四个脚架的横坐标和纵坐标;
[0093]
通过将泥石流或者滑坡的二维平面坐标代入进函数中,能够分析出在直线泥石流
或者滑坡的基础上反映出杆塔底部的其中一个脚架是否在直线上,反映出泥石流或者滑坡是否会影响到杆塔底部脚架。
[0094]
在所述步骤q05中,设定基准台顶部各脚与杆塔底部各脚架之间的距离向量为设定基准台顶部各脚与杆塔底部各脚架之间的距离向量为获取历史数据中发生泥石流或者滑坡时基准台顶部各脚与杆塔底部各脚架之间的距离向量为
[0095]
根据公式:
[0096]
当检测到杆塔底部其中一个脚架与基准台之间的距离大于标准距离时,分析判断:
[0097][0098]
其中,β是指距离向量与距离向量之间的夹角,是指距离向量的摸,是指距离向量的模;
[0099]
当检测到角度β大于标准角度时,表示杆塔底部其中一个脚架的沉降距离大于预设距离,同时达到历史数据预警条件,需检修报警;
[0100]
当检测到角度β小于标准角度时,表示杆塔底部其中一个脚架的沉降距离小于预设距离,表示没有达到历史数据预警条件;
[0101]
当得到距离向量之前,会先得到距离向量但是仅仅通过杆塔底部中的脚架并不能够分析出距离向量在受到天气的冲击后是否需要人工进行去维护检修,因此需要通过向量过程是否达到预警条件,因此,在这里需要结合判断泥石流的流动方向。
[0102]
实施例1:根据基准台底部一顶点为圆心,建立三维模型,基准台顶部各脚在时间t=t1内三轴上的坐标量集合w1={(a1,b1,c1),(a2,b2,c2),(a3,b3,c3),(a4,b4,c4)}={(0,0,80),(0,60,80),(70,0,80),(70,60,80)};
[0103]
根据杆塔底部各脚架的中心位置处设置三维坐标模型,监测杆塔底部各脚架在时间t^=t^1内三轴上的坐标量p={(x1,y1,z1),(x2,y2,z2),(x3,y3,z3),(x4,y4,z4)}={(60,50,0),(60,50,0),(60,100,0),(60,95,0)};获取历史数据内基准台与杆塔底部各脚架的平均距离为h={h1,h2,h3,h4}={120,115,118,110};其中误差范围在15;
[0104]
根据公式:
[0105][0106][0107][0108][0109]
由此可计算得到:120
‑
111=9;115
‑
107=8;128
‑
118=10;110
‑
87=23;
[0110]
得到m4的距离超过预设距离,定位杆塔底部第四个脚架;
[0111]
当检测到距离mk>h时,表示杆塔底部其中一个脚架与基准台之间的距离大于标准距离,定位该脚架位置。
[0112]
实施例2:检测到产生泥石流或者滑坡的概率s=0.95大于标准概率0.82时,获取泥石流或者滑坡在二维空间流动时的实时坐标f={(w1,e1)}={(500,850),(420,620)}和杆塔底部各脚架在二维平面内的坐标d={(k1,l1),(k2,l2),(k3,l3),(k4,l4)}={(0,0),(0,275),(80,275),(80,1000)},是根据杆塔其中一个脚架的坐标为核心建立二维模型;
[0113]
设定z=gu o;
[0114]
根据泥石流或者滑坡在二维空间流动时的实时坐标建立函数关系:
[0115]
z=1.91u 275;
[0116]
将上述杆塔底部各脚架在二维平面内的坐标计算,得出杆塔的第二个脚架在泥石流或者滑坡流动的方向。
[0117]
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
[0118]
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。