1.本发明涉及管控领域,尤其涉及一种云数据中心物联管控系统。
背景技术:
2.云数据中心是基于云计算结构的,具有计算和存储能力的中心。云数据中心中设置有规模巨大的用于支撑云计算结构的设备。现有技术中,对云数据中心的管控一般是通过设置传感器来获取云数据中心的环境数据,然后直接传输至管控中心进行数据处理,以实现对云数据中心的物联管控。但是这种处理方式并没有在采集端对错误的环境数据进行排除,从而导致管控中心需要处理过多的错误的环境数据,不利于管控中心及时发现云数据中心的环境异常情况。
技术实现要素:
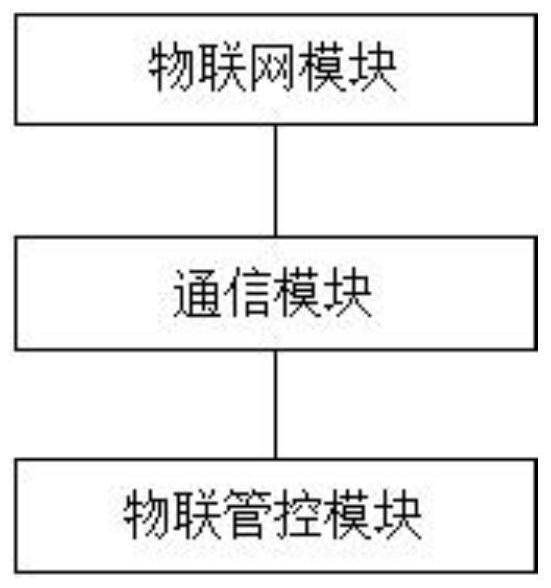
3.鉴于上述问题,本发明的目的在于提供一种云数据中心物联管控系统,包括物联网模块、通信模块和物联管控模块;
4.所述物联网模块用于获取云数据中心的环境数据,以及用于对环境数据进行预判断,根据判断结果将环境数据传输至所述通信模块;
5.所述通信模块用于将所述环境数据传输至所述物联管控模块;
6.所述物联管控模块用于基于所述环境数据对云数据中心进行管控;
7.对环境数据进行预判断,包括:
8.获取环境数据与邻域加权数据之间的误差值;
9.基于所述误差值判断所述环境数据是否为错误数据,获得判断结果。
10.作为优选,所述物联网模块包括无线传感器节点和数据收集基站;
11.所述无线传感器节点用于获取云数据中心的环境数据,并将所述环境数据传输至所述数据收集基站;
12.所述数据收集基站用于对环境数据进行预判断,根据判断结果将环境数据传输至所述通信模块。
13.作为优选,所述根据判断结果将环境数据传输至所述通信模块,包括:
14.若判断结果为所述环境数据为错误数据,则将所述错误数据删除;
15.若判断结果为所述环境数据不是错误数据,则将环境数据传输至所述通信模块。
16.作为优选,所述通信模块包括通信光纤;
17.所述通信光纤用于连接所述物联网模块和所述物联管控模块。
18.作为优选,所述物联管控模块包括数据存储单元、预警提示单元和数据管理单元;
19.所述数据存储单元用于存储所述环境数据;
20.所述预警提示单元用于基于预设的预警规则对所述环境数据进行处理,以及用于在识别出异常的环境数据时,发出预警提示;
21.所述数据管理单元用于对所述存储单元中存储的数据进行管理。
22.作为优选,所述获取环境数据与邻域加权数据之间的误差值,包括:
23.通过如下方式计算环境数据对应的邻域加权数据:
24.将环境数据对应的无线传感器节点记为nod
i
,将环境数据记为dat(nod
i
,p),p表示dat(nod
i
,p)的获取时刻;
25.获取nod
i
的误差计算半径内的邻域无线传感器节点的集合unei(nod
i
);
26.使用如下公式计算邻域加权数据:
[0027][0028]
其中,neidat(dat(nod
i
,p))表示dat(nod
i
,p)的邻域加权数据,dat(j,p)表示无线传感器节点j在p时刻获取的环境数据,δ2表示unei(nod
i
)中的无线传感器节点在p时刻获得的环境数据和nod
i
在p时刻获取的环境数据之间的方差,stg(j)表示无线传感器节点j和数据收集基站之间的通信距离,stg(nod
i
)表示无线传感器节点nod
i
和数据收集基站之间的通信距离,θ表示相关带宽参数;nod
i
的误差计算半径用r
s
(nod
i
)表示,r
s
(nod
i
)=r
max
(nod
i
)
×
γ,r
max
(nod
i
)表示nod
i
的最大通信半径,γ表示误差计算半径系数,γ∈(0.1,0.5),
[0029]
通过如下公式计算环境数据与邻域加权数据之间的误差值:
[0030][0031]
其中,errval(dat(nod
i
,p))表示dat(nod
i
,p)与neidat(dat(nod
i
,p))之间的误差值,表示预设的指数系数。
[0032]
作为优选,所述基于所述误差值判断所述环境数据是否为错误数据,获得判断结果,包括:
[0033]
若errval(dat(nod
i
,p))
‑
cmpthre>0,则判断结果为所述环境数据为错误数据,
[0034]
若errval(dat(nod
i
,p))
‑
cmpthre≤0,则判断结果为所述环境数据不是错误数据,
[0035]
cmpthre表示预设的比较参考值。
[0036]
本发明通过在采集端先对环境数据是否为错误数据进行判断,然后再根据判断结果将环境数据传输至物联管控模块,有效地降低了进入物联管控模块的错误数据的数量,有利于管控中心及时发现云数据中心的环境异常情况。
附图说明
[0037]
利用附图对本发明作进一步说明,但附图中的实施例不构成对本发明的任何限制,对于本领域的普通技术人员,在不付出创造性劳动的前提下,还可以根据以下附图获得其它的附图。
[0038]
图1,为本发明一种云数据中心物联管控系统的一种示例性实施例图。
具体实施方式
[0039]
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
[0040]
如图1所示的一种实施例,本发明提供了一种云数据中心物联管控系统,包括物联网模块、通信模块和物联管控模块;
[0041]
所述物联网模块用于获取云数据中心的环境数据,以及用于对环境数据进行预判断,根据判断结果将环境数据传输至所述通信模块;
[0042]
所述通信模块用于将所述环境数据传输至所述物联管控模块;
[0043]
所述物联管控模块用于基于所述环境数据对云数据中心进行管控;
[0044]
对环境数据进行预判断,包括:
[0045]
获取环境数据与邻域加权数据之间的误差值;
[0046]
基于所述误差值判断所述环境数据是否为错误数据,获得判断结果。
[0047]
本发明通过在采集端先对环境数据是否为错误数据进行判断,然后再根据判断结果将环境数据传输至物联管控模块,有效地降低了进入物联管控模块的错误数据的数量,有利于管控中心及时发现云数据中心的环境异常情况。
[0048]
对错误的数据进行处理时无效的,而且浪费了物联管控模的计算能力,因此,当云数据中心规模比较大时,会明显影响物联管控模块对异常环境情况的检测能力。
[0049]
具体的,环境数据包括温度、湿度、粉尘浓度等。
[0050]
作为优选,所述物联网模块包括无线传感器节点和数据收集基站;
[0051]
所述无线传感器节点用于获取云数据中心的环境数据,并将所述环境数据传输至所述数据收集基站;
[0052]
所述数据收集基站用于对环境数据进行预判断,根据判断结果将环境数据传输至所述通信模块。
[0053]
具体的,无线传感器节点设置在云数据中心中的监测位置,相邻的两个无线传感器节点的通信范围互相重叠。数据收集基站的数量可以根据云数据中心的面积进行确定,面积越大,数据收集基站的数量越多。
[0054]
作为优选,所述根据判断结果将环境数据传输至所述通信模块,包括:
[0055]
若判断结果为所述环境数据为错误数据,则将所述错误数据删除;
[0056]
若判断结果为所述环境数据不是错误数据,则将环境数据传输至所述通信模块。
[0057]
作为优选,所述通信模块包括通信光纤;
[0058]
所述通信光纤用于连接所述物联网模块和所述物联管控模块。
[0059]
具体的,通信模块除了通信光纤之外,还可以是其它通信设施,例如同轴电缆等。
[0060]
作为优选,所述物联管控模块包括数据存储单元、预警提示单元和数据管理单元;
[0061]
所述数据存储单元用于存储所述环境数据;
[0062]
所述预警提示单元用于基于预设的预警规则对所述环境数据进行处理,以及用于在识别出异常的环境数据时,发出预警提示;
[0063]
所述数据管理单元用于对所述存储单元中存储的数据进行管理。
[0064]
具体的,预设的预警规则可以是基于阈值判断的预警规则,例如当环境数据大于
某个阈值时,进行预警提示。
[0065]
作为优选,所述数据管理单元包括权限验证子单元、数据查询子单元和数据导出子单元;
[0066]
所述权限验证子单元用于判断工作人员是否具有操作数据查询子单元和数据导出子单元的权限;
[0067]
所述数据查询子单元用于根据工作人员输入的环境数据的属性对数据存储单元中存储的环境数据进行查询,并将查询结果进行可视化展示;
[0068]
所述数据导出子单元用于对存储单元中存储的环境数据进行导出处理。
[0069]
作为优选,所述属性包括采集时间、数据类型、存储时间等。数据类型包括温度数据、湿度数据、粉尘浓度数据等。
[0070]
作为优选,所述获取环境数据与邻域加权数据之间的误差值,包括:
[0071]
通过如下方式计算环境数据对应的邻域加权数据:
[0072]
将环境数据对应的无线传感器节点记为nod
i
,将环境数据记为dat(nod
i
,p),p表示dat(nod
i
,p)的获取时刻;
[0073]
获取nod
i
的误差计算半径内的邻域无线传感器节点的集合unei(nod
i
);
[0074]
使用如下公式计算邻域加权数据:
[0075][0076]
其中,neidat(dat(nod
i
,p))表示dat(nod
i
,p)的邻域加权数据,dat(j,p)表示无线传感器节点j在p时刻获取的环境数据,δ2表示unei(nod
i
)中的无线传感器节点在p时刻获得的环境数据和nod
i
在p时刻获取的环境数据之间的方差,stg(j)表示无线传感器节点j和数据收集基站之间的通信距离,stg(nod
i
)表示无线传感器节点nod
i
和数据收集基站之间的通信距离,θ表示相关带宽参数;nod
i
的误差计算半径用r
s
(nod
i
)表示,r
s
(nod
i
)=r
max
(nod
i
)
×
γ,r
max
(nod
i
)表示nod
i
的最大通信半径,γ表示误差计算半径系数,γ∈(0.1,0.5),
[0077]
通过如下公式计算环境数据与邻域加权数据之间的误差值:
[0078][0079]
其中,errval(dat(nod
i
,p))表示dat(nod
i
,p)与neidat(dat(nod
i
,p))之间的误差值,表示预设的指数系数。
[0080]
作为优选,所述基于所述误差值判断所述环境数据是否为错误数据,获得判断结果,包括:
[0081]
若errval(dat(nod
i
,p))
‑
cmpthre>0,则判断结果为所述环境数据为错误数据,
[0082]
若errval(dat(nod
i
,p))
‑
cmpthre≤0,则判断结果为所述环境数据不是错误数据,
[0083]
cmpthre表示预设的比较参考值。
[0084]
本发明上述实施例,在进行错误数据的判断时,先获取邻域加权数据,然后再获取误差值,相较于现有技术中直接将环境数据与某个预先给定的数值进行比较来判断是否为错误数据的方式,本发明的适应性更强,而且判断更为准确。从公式的构成可知,本发明的邻域加权数据能够随着环境数据进行自适应变化,并不需要预先给定数值,因此适应性更强。另外,无线传感器节点会因为老化等原因,随着事件的增加,获取的数据误差可能会变大,因此,若仅依据预设的数值来进行比较,显然无线传感器节点的工作时间越长,产生错误判断的概率就越大。而本发明是基于邻域加权数据计算误差值,误差值只要小于能够接收的误差范围,即可以认为当时数据为正确的数据,这个误差范围通过比较参考值来设置,并不会受到传感器节点老化的影响,因此本发明的判断更为准确。
[0085]
作为优选,所述判断工作人员是否具有操作数据查询子单元和数据导出子单元的权限,包括:
[0086]
获取所述工作人员的职位信息;
[0087]
基于职位信息判断所述工作人员是否具有操作数据查询子单元和数据导出子单元的的权限。
[0088]
具体的,不同的职位对应不同的操作权限,只有职位的等级高于设定的职位门槛才能具有操作数据查询子单元和数据导出子单元的工作人员的权限。
[0089]
作为优选,所述获取工作人员的职位信息,包括:
[0090]
获取所述工作人员的脸部图像;
[0091]
基于所述脸部图像确定所述工作人员的身份;
[0092]
基于所述身份确定所述工作人员的职位信息。
[0093]
具体的,可以通过对工作人员进行人脸识别来获取工作人员的员工编号等信息,然后根据员工编号在员工信息数据库中确定工作人员的职位信息。
[0094]
作为优选,所述基于所述脸部图像确定所述工作人员的身份,包括:
[0095]
对所述脸部图像进行灰度化处理,获得第一图像;
[0096]
对所述第一图像进行降噪处理,获得第二图像;
[0097]
对所述第一图像进行边界检测处理,获得第三图像;
[0098]
将第二图像和第三图像进行加权融合,获得第四图像;
[0099]
获取所述第四图像中的特征信息;
[0100]
将所述特征信息与员工信息数据库中存储的特征信息进行匹配,确定所述工作人员的身份。
[0101]
现有的图像预处理过程,由于需要对噪点进行处理,因此容易导致图像中的边界细节信息丢失。而在本发明的上述实施例中,通过第二图像和第三图像的加权融合,能够将第三图像中的边界信息反映到第二图像中,从而实现增强降噪后的图像中的边界细节信息的效果,有利于提高本发明的权限判断的准确性,从而提高本发明的物联管控系统的数据安全性。
[0102]
作为优选,所述对所述第一图像进行降噪处理,获得第二图像,包括:
[0103]
采用迭代降噪的方式对第一图像进行降噪处理:
[0104]
对于第一次降噪处理,获取第一图像中灰度值大于预设的灰度值阈值的像素点的
集合u1,分别对u1中的像素点进行降噪处理,获得第一次降噪处理图像dcimg1;
[0105]
对于第n次降噪处理,n大于等于2,将第n
‑
1次降噪处理获得的图像记为dcimg
n
‑
1,将第n
‑
1次降噪处理中进行了降噪处理的像素点的集合记为u
n
‑1,将dcimg
n
‑
1中所有已经经过降噪处理的像素点的集合记为au
n
‑1,
[0106]
在dcimg
n
‑1中获取u
n
‑1中每个像素点的8邻域的像素点,将u
n
‑1中每个像素点的8邻域的像素点中不属于au
n
‑1中的像素点存入集合u
n
,
[0107]
在dcimg
n
‑1中分别对u
n
中的像素点进行降噪处理,获得第n次降噪处理图像dcimg
n
,获取u
n
和au
n
‑1的并集,得到dcimg
n
中所有已经经过降噪处理的像素点的集合au
n
,
[0108]
迭代结束的条件为u
n
为空集;
[0109]
在现有技术中,一般是采用同一种降噪算法对图像进行全局降噪处理,但是这种处理方式很容易导致边界细节信息的丢失,因此,本发明通过多次降噪的方式进行迭代降噪处理,以灰度值大于预设的灰度值阈值的像素点作为第一批进行降噪处理的像素点,获得第一次降噪处理图像,然后采用同样的方式对后续的迭代过程中的像素点进行降噪处理。这种降噪处理方式,每次降噪处理只是针对一小部分像素点进行降噪处理,而且前一次降噪处理的获得的图像能够影响到下一次降噪处理的结果。由于刚开始时是对灰度值较大的像素点进行降噪处理,而一般灰度值较大的像素点属于噪点的概率比较大,因此准确能够获得准确的降噪处理的结果。正确的降噪处理结果能够在迭代的过程中进行累积,从而大大提高了最终的降噪结果的准确性。
[0110]
作为优选,通过如下方式对像素点进行降噪处理:
[0111]
将待进行降噪处理的像素点记为pixel;
[0112]
判断像素点pixel的灰度值的类型:
[0113]
若gray(pixel)≥graythre1,则像素点pixel的灰度值为第一类型;
[0114]
若graythre2<gray(pixel)<graythre1,则像素点pixel的灰度值为第二类型;
[0115]
若gray(pixel)≤graythre2,则像素点pixel的灰度值为第三类型;
[0116]
graythre1和graythre2分别表示预设的第一判断参数和第二判断参数;gray(pixel)表示像素点pixel的灰度值,
[0117]
根据灰度值的类型为选择预设的降噪方式对pixel进行降噪处理:
[0118]
对于第一类型的像素点,采用中值降噪的方式进行降噪处理;
[0119]
对于第二类型的像素点,采用高斯函数进行降噪处理;
[0120]
对于第三类型的像素点,采用非局部均值降噪算法进行降噪处理。
[0121]
在上述实施例中,降噪处理的算法选择上与灰度值相关,对于较大的灰度值,由于属于噪声点的概率比较大,因此采用中值降噪算法进行降噪处理,而对于像素值比较小的像素点,由于其属于噪声点的概率比较小,因此,采用更能有效保留边界信息的非局部均值降噪算法进行处理。
[0122]
作为优选,所述对所述第一图像进行边界检测处理,获得第三图像,包括:
[0123]
将边界检测窗口记为bdmat,
[0124][0125]
对于第一图像中的像素点pix
one
,通过bdmat获取pix
one
的像素比较集合cmpu(pix
one
),cmpu(pix
one
)的获取规则如下:
[0126]
将pix
one
置于bdmat的中心,在第一图像中将检测窗口bdmat内数值为1的元素对应的像素点存入比较集合cmpu(pix
one
);
[0127]
分别计算cmpu(pix
one
)中的像素点与pix
one
之间的差异值:
[0128][0129]
其中,difval(pix
one
,cmpu)表示cmpu(pix
one
)中的像素点cmpu与pix
one
之间的差异值,graamp(pix
one
)和graamp(cmpu)分别表示cmpu和pix
one
的梯度幅值,gray(pix
one
)和gray(cmpu)分别表示cmpu和pix
one
的灰度值,valst1表示预设的梯度幅值标准值,valst2表示预设的灰度值标准值,α和β分别表示预设的权重参数,α β=1;
[0130]
将cmpu(pix
one
)中差异值小于预设的差异值阈值的像素点的数量记为像素点pix
one
的边界检测值blval(pix
one
);
[0131]
若blthre1<blval(pix
one
)<blthre2,则像素点pix
one
为边界像素点;blthre1和blthre2表示预设的两个边界检测值阈值,blthre1<blthre2;
[0132]
将第一图像中的边界像素点的灰度值设为gray
db
,将非边界像素点的灰度值设为0,从而获得第三图像。
[0133]
本发明在边界检测的过程中,通过检测窗口来获取边界检测值,这种设置方式有利于获取准确的边界检测结果。通过获取与当前进行边界检测的像素点之间差异小于预设的差异量化条件的像素点的数量作为边界检测值,然后将边界检测值与边界检测值阈值进行比较,从而获得边界检测结果。对于孤立的噪声像素点而言,其边界检测值会非常小,通过blthre1能够进行筛选,而对于连续区域中的像素点,边界检测会非常大,因此可以通过blthre2筛选出去,因此,本发明能够在有效降低噪声点的影响的同时获得准确的边界检测结果。
[0134]
作为优选,所述将第二图像和第三图像进行加权融合,获得第四图像,包括:
[0135]
采用如下方式对第二图像和第三图像中的像素点进行加权融合:
[0136]
img4(x)=w1×
img2(x) w2×
img3(x)
[0137]
其中,img2(x)、img3(x)、img4(x)分别表示像素点x在第二图像、第三图像、第四图像中的灰度值,w1和w2表示预设的比例参数。
[0138]
尽管已经示出和描述了本发明的实施例,本领域技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变形,本发明的
范围由权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。