1.本发明属于柔性电极加工技术领域,尤其涉及一种柔性电极的加工方法。
背景技术:
2.传统的柔性电极的制造大多依赖于标准的微电子制造工艺,包括薄膜的真空沉积、旋涂、 光刻以及干/湿法蚀刻等过程,此类柔性电极具有如下缺陷:
3.a.制备工艺复杂、成本高、不可兼容性加大,限制了柔性电极的商业化使用;b.电极厚 度较大,与人体皮肤贴合性能差,在运动过程中易产生信号伪影现象。
4.因此,如何提出一种自动化程度高的柔性电极加工工艺,以降低柔性电极的制造成本, 实现柔性电极的大面积制备,进而提高柔性电极的生产效率,具有重要的意义。
技术实现要素:
5.本发明的目的在于提出一种柔性电极的加工方法,该加工方法能够实现柔性电极的大面 积制备,利于提高柔性电极的生产效率,同时降低电极的生产成本。
6.本发明为了实现上述目的,采用如下技术方案:
7.一种柔性电极的加工方法,其采用的柔性电极的加工设备,包括机架、控制器、柔性薄 膜辊安装支架、柔性薄膜水转印纸成型装置、导电油墨喷涂装置、压花成型装置和牵引装置;
8.其中,机架采用双层结构,即包括上层机架和下层机架;其中,上层机架与下层机架为 上下叠放布置,上层机架的头端与下层机架的尾端上下对齐;
9.柔性薄膜辊安装支架以及柔性薄膜水转印纸成型装置均设置于所述上层机架上;
10.所述上层机架的头端设有第一转移辊,下层机架的尾端设有第二转移辊;
11.导电油墨喷涂装置、压花成型装置以及牵引装置均设置于所述下层机架上;
12.沿着柔性电极的加工方向看去,柔性薄膜辊安装支架、柔性薄膜水转印纸成型装置、导 电油墨喷涂装置、压花成型装置以及牵引装置由后向前依次设置;
13.柔性薄膜辊安装支架用于安装柔性薄膜辊并提供柔性电极加工所需的柔性薄膜;牵引装 置与柔性薄膜一端相连,且用于牵引柔性薄膜沿着柔性电极的加工方向运行;
14.柔性薄膜的运行方向为:从柔性薄膜辊开始沿着上层机架运行,经过第一转移辊后向下, 并经过第二转移辊的下方转移到下层机架上,再沿着下层机架向牵引装置的方向运行;
15.所述柔性薄膜水转印纸成型装置包括第一工作台面、pva溶液喷涂机构、水转印纸自动 取放机构以及第一加热机构;第一工作台面设置于上层机架上;
16.第一工作台面沿着柔性薄膜的运行方向布置;
17.其中,所述柔性薄膜辊安装支架位于所述第一工作台面的后端;
18.pva溶液喷涂机构和水转印纸自动取放机构均位于第一工作台面的侧部,且沿着所述柔 性薄膜的运行方向看去,水转印纸自动取放机构位于pva溶液喷涂机构的下游;
19.在第一工作台面上对应水转印纸自动取放机构的工作区设有加热机构安装槽;第一加热 机构设置于加热机构安装槽内,且第一加热机构的高度不高于所述第一工作台面的高度;
20.所述导电油墨喷涂装置包括第二工作台面、导电油墨喷涂机构以及第二加热机构;其中, 第二工作台面设置于下层机架上,且沿着所述柔性薄膜运行方向布置;
21.所述导电油墨喷涂机构位于第二工作台面的侧部;
22.在第二工作台面上对应导电油墨喷涂机构的工作区处设有加热机构安装槽,第二加热机 构设置于加热机构安装槽内,且第二加热机构的高度不高于所述第二工作台面的高度;
23.其中,pva溶液喷涂机构、水转印纸自动取放机构、第一加热机构、导电油墨喷涂机构、 第二加热机构、压花成型装置以及牵引装置分别与控制器相连;
24.所述柔性电极的加工设备还包括第一图像传感器、第二图像传感器、第三图像传感器以 及第四图像传感器;其中,各个图像传感器分别与控制器相连;
25.第一图像传感器和第二图像传感器均设置于第一工作台面的侧部;其中,第一图像传感 器对准pva溶液喷涂机构工作区,第二图像传感器对准第一加热机构的上方;
26.第三图像传感器设置于第二工作台面的侧部,且对准第二加热机构的上方;
27.第四图像传感器位于压花成型装置的侧部,且对准所述压花成型装置的入口位置;
28.所述柔性电极的加工方法包括如下步骤:
29.步骤1.在牵引装置的带动下,柔性薄膜沿着柔性薄膜的运行方向运行,且每次柔性薄膜 运行设定距离后停止;
30.步骤2.以上各个图像传感器分别对各个工作区进行监控;其中:
31.当第一图像传感器检测到柔性薄膜在pva溶液喷涂机构工作区时,pva溶液喷涂机构动 作,并在柔性薄膜的表面均匀喷涂pva溶液;
32.当第二图像传感器检测到带有pva溶液的柔性薄膜区域运行到第一加热机构的上方时, 首先水转印纸自动取放机构将水转印纸放置于该区域上方,然后第一加热机构加热;
33.至此,完成柔性薄膜水转印纸的制备工作;
34.当第三图像传感器检测到带有水转印纸的柔性薄膜区域运行到第二加热机构的上方时, 导电油墨喷涂机构在带有水转印纸的柔性薄膜区域喷涂导电油墨,然后第二加热机构加热;
35.其中,水转印纸以及导电油墨分别处于柔性薄膜的相对侧表面;
36.至此,完成导电油墨的喷涂工作;
37.当第四图像传感器检测到有喷涂导电油墨的柔性薄膜区域到达压花成型装置的入口位置 时,压花成型装置启动,并实现压花操作,从而完成一次柔性电极的制备;
38.步骤3.待以上各个工作区的操作均完成后,在牵引装置的带动下,柔性薄膜继续沿着柔 性薄膜的运行方向运行,且运行设定距离后停止;重复执行以上步骤2。
39.本发明具有如下优点:
40.如上所述,本发明提出了一种柔性电极的加工方法,其加工过程自动化程度高,能
够实 现柔性电极的大面积制备,提高柔性电极的生产效率,同时利于降低电极的生产成本。
附图说明
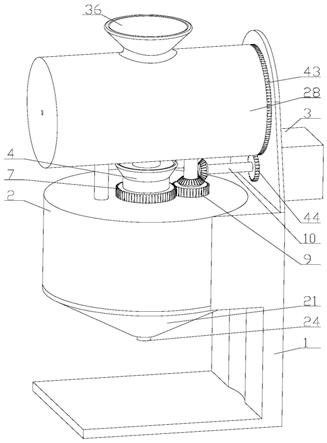
41.图1为本发明实施例中柔性电极的加工设备的一侧结构示意图;
42.图2为本发明实施例中柔性电极的加工设备的另一侧结构示意图;
43.图3为本发明实施例中柔性电极的加工设备的一侧视图;
44.图4为本发明实施例中柔性电极的加工设备的另一侧视图;
45.图5为本发明实施例中柔性薄膜水转印纸成型装置的结构示意图;
46.图6为本发明实施例中柔性薄膜水转印纸成型装置(去除柔性薄膜)的结构示意图;
47.图7为图5中柔性薄膜水转印纸成型装置的主视图;
48.图8为图5中柔性薄膜水转印纸成型装置的后视图;
49.图9为图5中柔性薄膜水转印纸成型装置的左视图;
50.图10为图5中柔性薄膜水转印纸成型装置的右视图;
51.图11为图5中柔性薄膜水转印纸成型装置的俯视图;
52.图12为本发明实施例中柔性薄膜纠偏装置的结构示意图;
53.图13为本发明实施例中柔性薄膜纠偏装置的正视图;
54.图14为本发明实施例中柔性薄膜纠偏装置的侧视图;
55.图15为图14中轴套未发生偏转时的a部放大图;
56.图16为图14中轴套发生偏转时的a部放大图;
57.图17为本发明实施例中轴套发生偏转时纠偏辊的剖视图;
58.图18为本发明实施例中柔性薄膜纠偏装置的使用状态图;
59.图19为本发明实施例中导电油墨喷涂装置的结构示意图;
60.图20为本发明实施例中导电油墨喷涂装置的俯视图;
61.图21为本发明实施例中压花成型装置的结构示意图;
62.图22为本发明实施例中压花成型装置的侧视图;
63.图23为本发明实施例中压花成型装置的俯视图;
64.图24为本发明实施例中压花成型装置的主视图;
65.图25为本发明实施例中上压辊与下压辊的安装示意图;
66.图26为图25中上压辊与下压辊安装的侧视图;
67.图27为图25中上压辊与下压辊安装的主视图;图28为本发明实施例中柔性电极的加工方法的流程示意图。
68.其中,1
‑
柔性薄膜辊安装支架,2
‑
柔性薄膜水转印纸成型装置,3
‑
导电油墨喷涂装置,4
‑ꢀ
压花成型装置,5
‑
牵引装置,6
‑
柔性薄膜辊,7
‑
柔性薄膜,8
‑
柔性薄膜纠偏装置,9
‑
产品箱;
69.101
‑
立式安装架,102
‑
第一安装轴孔,103
‑
磁粉制动器,104
‑
第二安装轴孔,105
‑
压辊;
70.201
‑
第一工作台面,202
‑
横向导轨支架,203
‑
丝杠,204
‑
丝杠螺母,205
‑
丝杠螺母,
206
‑ꢀ
喷涂部件安装支架,207
‑
pva溶液容器,208
‑
pva溶液喷头,209
‑
pva溶液管路;
71.210
‑
电磁控制阀,211
‑
刮平部件,212
‑
l形支架,213
‑
柔性薄膜压板,214
‑
旋转底座,215
‑ꢀ
水转印纸放置箱,216
‑
吸盘支架,217
‑
电动吸盘,218
‑
丝杠螺母,219
‑
水转印纸;
72.220
‑
加热机构安装槽,221
‑
第一加热机构;
73.301
‑
第二工作台面,302
‑
第二加热机构,303
‑
两轴运动驱动机构,304
‑
导电油墨喷涂部件, 305
‑
刮平部件,306
‑
加热机构安装槽,307
‑
横向导轨支架,308
‑
丝杠,309
‑
丝杠螺母;
74.310
‑
丝杠螺母,311
‑
喷涂部件安装支架,312
‑
导电油墨容器,313
‑
导电油墨喷头,314
‑
电 磁控制阀,315
‑
l形支架,316
‑
柔性薄膜压板;
75.401
‑
上压辊,402
‑
下压辊,403
‑
上压辊支撑板,404
‑
压辊安装孔,405
‑
门型支架,406
‑
第 一驱动机构安装板,407
‑
第一通孔,408
‑
下压辊支撑板,409
‑
条形孔;
76.410
‑
升降单元,411
‑
支撑轴套,412
‑
第二驱动机构安装板,413
‑
第二通孔,414
‑
输送带, 415
‑
上压辊旋转驱动机构,416
‑
下压辊旋转驱动机构,417
‑
第一过渡辊,418
‑
第二过渡辊;
77.501
‑
牵引辊,502
‑
牵引电机;
78.801
‑
安装底座,802
‑
纠偏辊,803
‑
伸缩电机,804
‑
第一纠偏辊支撑立柱,805
‑
第二纠偏辊 支撑立柱,806
‑
导轨,807
‑
光电式检测传感器,808
‑
轴套安装轴插入孔,809
‑
轴套;
79.809a
‑
轴套本体,809b、809c
‑
安装轴,810
‑
圆形安装孔,811
‑
轴套安装轴插入孔。
具体实施方式
80.下面结合附图以及具体实施方式对本发明作进一步详细说明:
81.如图1和图2所示,一种柔性电极的加工设备,包括机架、柔性薄膜辊安装支架1、柔 性薄膜水转印纸成型装置2、导电油墨喷涂装置3、压花成型装置4以及牵引装置5。
82.本实施例中定义柔性电极的加工方向为前后方向,需要说明的是,此处的前后方向,是 指沿着柔性电极的加工流程上的前后方向,并非是指空间位置上的前后方向。
83.柔性薄膜辊安装支架1、柔性薄膜水转印纸成型装置2、导电油墨喷涂装置3、压花成型 装置4以及牵引装置5均设置于机架上,且沿着柔性电极的加工方向由后向前依次布置。
84.其中,柔性薄膜辊安装支架1用于安装柔性薄膜辊6,柔性薄膜辊6提供柔性电极加工 所需的柔性薄膜7,柔性薄膜7的运行方向即沿着柔性电极的加工方向。
85.牵引装置5与柔性薄膜7的一端相连,用于牵引柔性薄膜7由后向前运行。
86.本实施例中柔性薄膜水转印纸成型装置2、导电油墨喷涂装置3以及压花成型装置4等 各个装置所实现的操作均是在柔性薄膜7运行过程中完成的。
87.其中,柔性薄膜水转印纸成型装置2用于在柔性薄膜7上成型柔性薄膜水转印纸。
88.导电油墨喷涂装置3用于在柔性薄膜水转印纸的柔性薄膜表面喷涂导电油墨。
89.压花成型装置4用于在柔性薄膜喷涂导电油墨的区域压花成型,最终制得柔性电极。
90.如图3和图4所示,机架采用双层结构,即包括上层机架i和下层机架ii。上层机架i 与下层机架ii为上下叠放布置,其中,上层机架i的头端与下层机架ii的尾端上下对齐。
91.此处,上层机架i的头端即上层机架i在柔性电极的加工方向上的前端,而上层机架i 的尾端即上层机架i在柔性电极的加工方向上的后端。
92.同理,下层机架ii的头端即下层机架ii在柔性电极的加工方向上的前端,而下层机架ii 的尾端即下层机架ii在柔性电极的加工方向上的后端。
93.上层机架i的头端与下层机架ii的尾端上下对齐,便于柔性薄膜7能够从上层机架i转 移到下层机架ii上,进而在下层机架ii上继续执行后续流程。
94.如图1和图2所示,柔性薄膜辊安装支架1设置于上层机架i的尾端,柔性薄膜水转印 纸成型装置2设置于上层机架i上,并在上层机架i上完成柔性薄膜水转印纸的成型操作。
95.上层机架i的头端设有第一转移辊l1,下层机架的尾端设有第二转移辊l2,如图2所示。
96.柔性薄膜7在上层机架i和下层机架ii上的的运行方向为:
97.从柔性薄膜辊6开始沿着上层机架i运行,经过第一转移辊l1后向下,并经过第二转移 辊l2的下方转移到下层机架ii上,再沿着下层机架ii向牵引装置5的方向运行。
98.导电油墨喷涂装置3以及压花成型装置4均设置于下层机架ii上,导电油墨喷涂装置3 以及压花成型装置4分别在下层机架ii上完成导电油墨喷涂以及压花成型工艺。
99.此外,为了防止柔性薄膜7在运行过程中发生偏移,本实施例还进行了如下设计:
100.如图1和图2所示,柔性电极的加工设备还包括柔性薄膜纠偏装置8,该柔性薄膜纠偏 装置8用于纠正柔性薄膜的运行方向,使其在运行过程中不会发生偏移。
101.其中,柔性薄膜纠偏装置8设置于上层机架i与下层机架ii对齐的一端。
102.本实施例中柔性薄膜水转印纸成型装置2、导电油墨喷涂装置3、压花成型装置4等各个 装置自动化程度高,通过各个装置的组合,利于实现柔性电极的自动化加工。
103.另外,本实施例采用压花成型工艺实现对柔性电极的加工,利于降低生产成本。
104.下面对柔性电极的加工设备的各部分结构进行详细说明:
105.如图5和图6所示,柔性薄膜水转印纸成型装置2包括第一工作台面201、pva溶液喷 涂机构、水转印纸自动取放机构以及第一加热机构221。
106.其中,上层机架i包括支撑腿ia以及水平台面ib。支撑腿ia有多个,各个支撑腿ia分 别安装于水平台面ib的各个边角位置,用于支撑水平台面ib。
107.第一工作台面201设置于上层机架i(水平台面ib)的上方,第一工作台面201的布置 方向应沿着柔性薄膜7的运行方向,例如图5中箭头指示的前后方向。
108.第一工作台面201为表面光滑的台面,以减小柔性薄膜7在其表面运行的阻力。
109.柔性薄膜辊安装支架1设置于第一工作台面201的后端。
110.本实施例中柔性薄膜7可采用聚酰亚胺(pi)薄膜、聚脂(pet)薄膜、聚萘酯(pen) 薄膜、聚碳酸酯(pc)薄膜或聚氯乙烯(pvc)薄膜等,此处不再赘述。
111.如图8至图10所示,柔性薄膜辊安装支架1包括一组立式安装板101,立式安装板101 有两个且为对称设置,即分别位于第一工作台面201的一组相对侧,例如左、右侧。
112.每个立式安装板101上分别设置一个第一安装轴孔,例如第一安装轴孔102,如图10所 示,柔性薄膜辊6的每个端轴分别对应插入一个第一安装轴孔102内。
113.此外,在柔性薄膜辊安装支架1的一侧部(例如图5中示出的左侧部)设有磁粉制动
器 103,其中,磁粉制动器103位于对应侧立式安装板101的外侧。
114.磁粉制动器103与柔性薄膜辊6的一个端轴(例如图5中左侧端轴)相连。磁粉制动器 103能够调节拉伸时柔性薄膜7所受张力,保证柔性薄膜7均匀拉伸。
115.每个立式安装板101上还分别设置一个第二安装轴孔,例如第二安装轴孔104。
116.两个立式安装板101之间还设置一个压辊105。其中,压辊105的(左、右)每个端轴 分别伸入一个第二安装轴孔104内,从而实现压辊的安装。
117.安装后,压辊105的安装高度低于柔性薄膜辊6的安装高度。
118.柔性薄膜辊上的柔性薄膜7经压辊105的下方穿出并沿着第一工作台面201运行。压辊 105保证柔性薄膜7在被牵引装置5牵引过程中始终沿第一工作台面201表面运行。
119.pva溶液喷涂机构和水转印纸自动取放机构均位于第一工作台面201的侧部,且沿着柔 性薄膜的运行方向看去,水转印纸自动取放机构位于pva溶液喷涂机构的下游。
120.此处的下游是指,柔性薄膜先经过pva溶液喷涂机构,再经过水转印纸自动取放机构。
121.pva溶液喷涂机构用于向柔性薄膜7的表面均匀喷涂pva溶液。
122.如图7至图11所示,pva溶液喷涂机构包括两轴运动驱动机构、pva溶液喷涂部件以 及刮平部件,pva溶液喷涂部件以及刮平部件均安装于两轴运动驱动机构上。
123.在两轴运动驱动机构的带动下,pva溶液喷涂部件以及刮平部件能够同步实现沿竖向运 动以及沿柔性薄膜7的运行方向(即沿图5中的前后方向)移动。
124.两轴运动驱动机构包括第一轴运动驱动机构以及第二轴运动驱动机构;第一轴运动驱动 机构以及第二轴运动驱动机构均采用丝杠驱动机构。
125.第一轴运动驱动机构为竖向运动驱动机构,第二轴运动驱动机构安装于第一轴运动驱动 机构上,第一轴运动驱动机构可带动第二轴运动驱动机构上下运动。
126.第一轴运动驱动机构的结构较为常规,采用常见的丝杠驱动机构即可。
127.如图10所示,第二轴运动驱动机构包括横向导轨支架202、丝杠203以及丝杠螺母204。 横向导轨支架202安装于第一轴运动驱动机构的丝杠螺母205上,如图9所示。
128.当丝杠螺母205上下运动时,能够带动第二轴运动驱动机构整体上下运动。
129.横向导轨支架202沿柔性薄膜7的运行方向伸展。
130.丝杠203安装于横向导轨支架202上,其伸展方向与横向导轨支架202的伸展方向相同。 丝杠螺母204安装于丝杠203上,且能够沿着柔性薄膜7的运行方向往复运动。
131.在丝杠螺母204上安装有喷涂部件安装支架206,如图6所示。喷涂部件安装支架206 沿垂直于柔性薄膜7运行方向的方向伸展至第一工作台面201上方。
132.其中,pva溶液喷涂部件以及刮平部件均安装于喷涂部件安装支架206上,pva溶液喷 涂部件以及刮平部件均位于第一工作台面201的正上方。
133.pva溶液喷涂部件包括pva溶液容器207以及多个pva溶液喷头208;其中,pva溶 液容器的出口通过pva溶液管路209与各个pva溶液喷头208相连。
134.在pva溶液容器207出口处设有电磁控制阀210,用于控制pva溶液容器打开和关闭。
135.各个pva溶液喷头208排成一排,且排布方向与柔性薄膜7的运行方向垂直。
136.刮平部件211的布置方向与pva溶液喷头208的排布方向一致。沿着柔性薄膜的运
行方 向看去,刮平部件211位于pva溶液喷头208的上游或下游侧。
137.刮平部件211优选采用刮板或滚筒,通过刮取或滚压的方式实现pva溶液均匀涂覆。
138.此外,在pva溶液管路209上还设有泵(图中未示出,此处为常规设置,不再赘述), 用于从pva溶液容器207中抽取pva溶液,然后输送至各个pva溶液喷头208处。
139.在喷涂部件安装支架206沿着第一工作台面201运行时,pva溶液喷涂部件向柔性薄膜 7的表面喷涂pva溶液;同时,刮平部件211实现pva溶液的均匀涂覆。
140.如图7所示,横向导轨支架202沿柔性薄膜7运行方向的两个端部分别设置一个l形支 架212。其中,l形支架212沿垂直于柔性薄膜运行的方向布置。
141.每个l形支架212的竖直段与横向导轨支架202的对应端部相连。
142.每个l形支架212的水平段均延伸至第一工作台面201的上方。
143.每个l形支架212的水平段上设置一个柔性薄膜压板213,该柔性薄膜压板213采用方 形压板即可,柔性薄膜压板213的伸展方向垂直于柔性薄膜7的运行方向。
144.在pva溶液喷涂部件以及刮平部件工作之前,在横向导轨支架202上的两个柔性薄膜压 板213均会压在柔性薄膜7的不同位置处,保证喷涂过程中柔性薄膜7不会发生褶皱。
145.pva溶液喷涂部件以及刮平部件在两个柔性薄膜压板213之间的区域工作。
146.水转印纸自动取放机构用于将水转印纸自动放置在柔性薄膜7的表面。
147.如图7至图11所示,水转印纸自动取放机构包括旋转底座214、升降式吸盘机构以及水 转印纸放置箱215。旋转底座214采用常规的旋转底座即可。
148.在旋转底座214内设有旋转电机(图中未示出),升降式吸盘机构的底部安装于旋转底座 214上,在旋转底座214的带动下,升降式吸盘机构可实现水平旋转运动。
149.升降式吸盘机构包括升降式驱动机构、吸盘支架216以及电动吸盘217。
150.升降式驱动机构采用常规的丝杠驱动机构即可。
151.吸盘支架216安装于升降式驱动机构的丝杠螺母218上,电动吸盘217安装于吸盘支架 216上。如图6所示,吸盘支架216包括一个条形杆216a和一个u形板216b。
152.条形杆216a的一端与丝杠螺母218相连,另一端与u形板216b相连。
153.在u形板216b的下部安装有四个电动吸盘217,在通电时,四个电动吸盘217能够实现 水转印纸219的吸附,断电后,将水转印纸219放置在柔性薄膜7表面。
154.水转印纸放置箱215位于旋转底座214的侧部,且用于盛放水转印纸219。
155.如图6所示,在第一工作台面201上对应水转印纸自动取放机构的工作区设有加热机构 安装槽220,第一加热机构221设置于加热机构安装槽220内。
156.第一加热机构221优选采用加热平板,其作用在于加快pva溶液的固化,从而使得柔性 薄膜7能够很好的与水转印纸219贴合在一起,制得柔性薄膜水转印纸。
157.加热平板安装后的高度不高于第一工作台面201的高度,以免影响柔性薄膜7的运行。
158.本实施例中柔性薄膜水转印纸成型装置的大致工作过程如下:
159.在牵引装置5的带动下,柔性薄膜7沿着第一工作台面201移动设定距离后停止;
160.紧接着,pva溶液喷涂机构开始动作,具体动作过程如下:
161.第一轴运动驱动机构带动第二轴运动驱动机构向下运动,pva溶液喷涂部件、刮平
部件 以及柔性薄膜压板213均会同步向下运动,直至柔性薄膜压板213压在柔性薄膜7上停止;
162.第二轴运动驱动机构开始动作,其中,丝杠螺母204沿柔性薄膜7的运行方向运动,同 时会带动喷涂部件安装支架206沿柔性薄膜7的运行方向运动;
163.此时,pva溶液喷涂部件、刮平部件跟随喷涂部件安装支架206同步运动;
164.在pva溶液喷涂部件和刮平部件运动过程中,会分别完成向柔性薄膜7的表面喷涂pva 溶液以及将pva溶液均匀涂覆在柔性薄膜7表面的动作;
165.pva溶液喷涂机构动作完成后,牵引装置带动柔性薄膜7继续运行设定距离后停止;
166.此时,喷涂完pva溶液的区域到达第一加热机构221上方;
167.水转印纸自动取放机构自动将水转印纸放置箱215的水转印纸219放置到涂覆有pva溶 液的区域,其中,水转印纸自动取放机构的动作过程如下:
168.电动吸盘217通电,首先在升降式驱动机构的带动下,电动吸盘217下降并完成水转印 纸219的吸附,然后在升降式驱动机构的反向带动下,电动吸盘217上升至一定高度;
169.需要注意,电动吸盘217上升的高度需要高于第一工作台面201的高度;
170.紧接着,旋转底座214带动升降式吸盘机构旋转,使其旋转至第一工作台面201的上方, 此时,电动吸盘217上吸附的水转印纸对准喷涂完pva溶液的区域;
171.升降式驱动机构继续动作并带动电动吸盘217下降,将水转印纸219放置到柔性薄膜上;
172.第一加热机构221加热至一定温度,使得pva溶液固化,从而制得柔性薄膜水转印纸。
173.由上述过程不难看出,本实施例中柔性薄膜水转印纸成型装置2,自动化程度高,利于 提高柔性薄膜水转印纸的制备效率,且有效保证了柔性薄膜水转印纸的成型质量。
174.如图12至图18所示,柔性薄膜纠偏装置8包括检测传感器以及纠偏组件。其中,检测 传感器用于检测柔性薄膜7在运行过程中是否发生偏移。
175.检测传感器优选采用光电式检测传感器,当然也可以采用超声波检测传感器。
176.纠偏组件包括安装底座801、纠偏辊支撑立柱、纠偏辊802以及伸缩电机803。
177.其中,纠偏辊支撑立柱包括第一纠偏辊支撑立柱804和第二纠偏辊支撑立柱805,第一 纠偏辊支撑立柱804和第二纠偏辊支撑立柱805为相对设置。
178.第一纠偏支撑立柱804的底部固定安装于安装底座801上。在安装底座801上对应第二 纠偏支撑立柱805的位置设有沿柔性薄膜的运行方向布置的导轨806。
179.第二纠偏支撑立柱805的底部设有导向滑条(未示出),其中导向滑条与导轨806的结构 相适应,导向滑条伸入导轨806内,且能够沿导轨806沿柔性薄膜的运行方向移动。
180.伸缩电机803设置于安装底座801上,其活动端与第二纠偏支撑立柱805相连。
181.其中,伸缩电机803伸缩方向与导轨806的设置方向相同。
182.纠偏辊802有两个,两个纠偏辊802均设置于第一纠偏辊支撑立柱804与第二纠偏辊支 撑立柱805之间,且安装后,两个纠偏辊802为上下平行排列。
183.如图18所示,柔性薄膜纠偏装置安装于上层机架i和下层机架ii的过渡位置处,其中, 位置靠上的纠偏辊802高度与上层机架i(第一转移辊l1)的高度相适应。
184.同理,位置靠下的纠偏辊802高度则与下层机架ii(第二转移辊l2)的高度相适应。
185.本实施例中检测传感器可以有一组,该组检测传感器例如位于上层机架i处,检测传感 器用于实时检测柔性薄膜7在运行过程中是否发生偏移。
186.以光电式检测传感器为例,该组检测传感器包括两个光电式检测传感器807,且每个光 电式检测传感器807分别位于柔性薄膜7的左、右侧。
187.光电式检测传感器采用对射式光电检测传感器或反射型光电检测传感器。
188.当某一侧的光电式检测传感器被遮挡时,表明柔性薄膜7发生偏移,此时利用纠偏组件 能够及时调整柔性薄膜7的位置,使其始终沿着工作台面运行。
189.两个光电式检测传感器807可以分别安装于第一工作台面201的左、右侧部。当然,光 电式检测传感器也可以替换为超声波检测传感器,同样能够实现柔性薄膜偏移检测。
190.此外,为了实现纠偏辊802的安装,还进行了如下设计:
191.第一纠偏辊支撑立柱804和第二纠偏辊支撑立柱805对应纠偏辊802的安装位置分别设 置安装部,例如图14中a部放大图所示。由图15和图16所示:
192.该安装部包括轴套809以及圆形安装孔810,轴套809位于圆形安装孔810内。
193.在圆形安装孔810的顶部位置设有向上伸展的轴套安装轴插入孔811,在圆形安装孔810 的底部位置设有向下伸展的轴套安装轴插入孔808,如图15和图16所示。
194.其中,轴套安装轴插入孔811和轴套安装轴插入孔808的轴线方向在竖向上重合。
195.轴套809包括圆形轴套本体809a以及设置于该轴套本体809a顶部和底部的安装轴。
196.定义两个安装轴分别为安装轴809b、安装轴809c。其中,安装轴809b插入轴套安装轴 插入孔811内,安装轴809c插入轴套安装轴插入孔808内。
197.各个纠偏辊802的辊轴分别对应插入一个安装部的轴套本体809a内。
198.上述设计,能够保证伸缩电机803在推动第二纠偏支撑立柱805向前或向后移动时,纠 偏辊802与两个纠偏辊支撑立柱之间的角度和位置关系能够进行自适应调整。
199.如图15所示,当柔性薄膜不需要进行纠偏时,第一纠偏辊支撑立柱804和第二纠偏辊支 撑立柱805在垂直于柔性薄膜的运行方向上对准,此时轴套809未发生偏转。
200.当柔性薄膜需要进行纠偏时,伸缩电机803带动第二纠偏支撑立柱805向前或向后移动; 由于两个纠偏支撑立柱之间的相对位置发生变化,因此,轴套809会发生一定程度的偏转, 如图16所示,此时,纠偏辊802的水平截面剖视图如图17所示。
201.由图16和图17不难看出,当柔性薄膜需要进行纠偏时,纠偏辊802与两个纠偏辊支撑 立柱之间的角度和位置关系能够进行自适应调整,以满足柔性薄膜纠偏的需要。
202.当然,本实施例中纠偏装置还包括控制器部件(未示出),例如单片机控制器,单片机控 制器用于接收检测传感器反馈的信号,并实现对伸缩电机803动作的控制。
203.本发明实施例中纠偏装置的大致工作过程如下:
204.当检测传感器检测到柔性薄膜发生偏转时,伸缩电机803会根据柔性薄膜发生偏转的方 向(即图18中左右方向),带动第二纠偏支撑立柱805向前或向后移动,实现纠偏调整。
205.上述纠偏调整过程简单,且有效地保证了柔性薄膜始终沿工作台面运行。
206.如图19至图20所示,导电油墨喷涂装置3包括第二工作台面301、导电油墨喷涂机
构 以及第二加热机构302。其中,第二工作台面301设置于下层机架ii上。
207.第二工作台面301沿着柔性薄膜7运行方向布置。
208.第二工作台面301为表面光滑的台面,以减小柔性薄膜7在其表面运行的阻力。
209.柔性薄膜7经由第一转移辊l1、第二转移辊l2(的下侧)转移下来之后到达第二工作 台面301上,此时,柔性薄膜7带有水转印纸的一侧表面朝下。
210.第二转移辊l2除了起到转移柔性薄膜7的作用之外,还实现了柔性薄膜7的翻转,使得 导电油墨喷涂装置3能够在水转印纸相对的柔性薄膜另一侧表面进行喷涂操作。
211.导电油墨喷涂机构位于第二工作台面301的侧部。该导电油墨喷涂机构包括包括两轴运 动驱动机构303、导电油墨喷涂部件304以及刮平部件305。
212.两轴运动驱动机构303包括第一轴运动驱动机构以及第二轴运动驱动机构;第一轴运动 驱动机构以及第二轴运动驱动机构均采用丝杠驱动机构。
213.第一轴运动驱动机构为竖向运动驱动机构,第二轴运动驱动机构安装于第一轴运动驱动 机构上,第一轴运动驱动机构可带动第二轴运动驱动机构上下运动。
214.第一轴运动驱动机构的结构较为常规,采用常见的丝杠驱动机构即可。
215.导电油墨喷涂部件304以及刮平部件305均安装于两轴运动驱动机构上。
216.在两轴运动驱动机构303的带动下,导电油墨喷涂部件304以及刮平部件305能够同步 实现沿竖向运动以及沿柔性薄膜7的运行方向(即沿图19中的前后方向)移动。
217.如图19所示,第二轴运动驱动机构包括横向导轨支架307、丝杠308以及丝杠螺母309。 横向导轨支架307安装于第一轴运动驱动机构的丝杠螺母310上。
218.当丝杠螺母310上下运动时,能够带动第二轴运动驱动机构整体上下运动。
219.横向导轨支架307沿柔性薄膜7的运行方向伸展。
220.丝杠308安装于横向导轨支架307上,其伸展方向与横向导轨支架307的伸展方向相同。 丝杠螺母309安装于丝杠308上,且能够沿着柔性薄膜7的运行方向往复运动。
221.在丝杠螺母309上安装有喷涂部件安装支架311。
222.喷涂部件安装支架311沿垂直于柔性薄膜7运行方向的方向伸展至第二工作台面301上 方。其中,导电油墨喷涂部件以及刮平部件均安装于喷涂部件安装支架311上。
223.导电油墨喷涂部件以及刮平部件均位于第二工作台面301的正上方。
224.导电油墨喷涂部件包括导电油墨容器312以及多个导电油墨喷头313;其中,导电油墨 容器的出口通过导电油墨管路与各个导电油墨喷头313相连。
225.在导电油墨容器312出口处设有电磁控制阀314,用于控制导电油墨容器打开和关闭。
226.各个导电油墨喷头313排成一排,且排布方向与柔性薄膜7的运行方向垂直。
227.刮平部件305的布置方向与导电油墨喷头313的排布方向一致。沿着柔性薄膜的运行方 向看去,刮平部件305位于导电油墨喷头313的上游或下游侧。
228.刮平部件305优选采用刮板或滚筒,通过刮取或滚压的方式实现导电油墨均匀涂覆。
229.此外,在导电油墨管路上还设有泵(图中未示出,此处为常规设置,不再赘述),用于从 导电油墨容器312中抽取导电油墨,然后输送至各个导电油墨喷头313处。
230.在喷涂部件安装支架311沿着第二工作台面301运行时,导电油墨喷涂部件向柔性
薄膜 7的表面喷涂导电油墨;同时,刮平部件305实现导电油墨的均匀涂覆。
231.横向导轨支架307沿柔性薄膜7运行方向的两个端部分别设置一个l形支架315。其中, l形支架315沿垂直于柔性薄膜7运行的方向布置。
232.每个l形支架315的竖直段与横向导轨支架307的对应端部相连。
233.每个l形支架315的水平段均延伸至第二工作台面301的上方。
234.每个l形支架315的水平段上设置一个柔性薄膜压板316,该柔性薄膜压板316采用方 形压板即可,柔性薄膜压板316的伸展方向垂直于柔性薄膜7的运行方向。
235.在导电油墨喷涂部件以及刮平部件工作之前,在横向导轨支架307上的两个柔性薄膜压 板316均会压在柔性薄膜7的不同位置处,保证喷涂过程中柔性薄膜7不会发生褶皱。
236.导电油墨喷涂部件以及刮平部件在两个柔性薄膜压板316之间的区域工作。
237.在第二工作台面301上对应导电油墨喷涂机构304的工作区处设有加热机构安装槽306, 第二加热机构302设置于加热机构安装槽306内。
238.第二加热机构302的高度不高于第二工作台面301的高度。
239.第二加热机构302优选也采用加热平板,其作用是实现导电油墨喷涂后的快速干燥,利 于节约导电油墨喷涂工序的时间,进而提高整个柔性电极加工的效率。
240.本实施例中导电油墨喷涂装置3的工作过程如下:
241.在牵引装置5的带动下,柔性薄膜7沿着第二工作台面301移动设定距离后停止,此时, 带有水转印纸的柔性薄膜区域位于导电油墨喷涂装置3的工作区。
242.紧接着,导电油墨喷涂机构开始动作,具体动作过程如下:
243.第一轴运动驱动机构带动第二轴运动驱动机构向下运动,导电油墨喷涂部件、刮平部件 以及柔性薄膜压板316均会同步向下运动,直至柔性薄膜压板316压在柔性薄膜7上停止;
244.第二轴运动驱动机构开始动作,其中,丝杠螺母308沿柔性薄膜7的运行方向运动,同 时会带动喷涂部件安装支架311沿柔性薄膜7的运行方向运动;
245.此时,导电油墨喷涂部件、刮平部件跟随喷涂部件安装支架311同步运动;
246.在导电油墨喷涂部件和刮平部件运动过程中,会分别完成向柔性薄膜7的表面喷涂导电 油墨以及将导电油墨均匀涂覆在柔性薄膜7表面的动作;
247.导电油墨喷涂机构动作完成后,第二加热机构302实现对喷涂区域的干燥处理。
248.待干燥完成后,牵引装置5带动柔性薄膜7继续向前运行,待运行设定距离后停止,此 时,导电油墨喷涂装置3等待下一次导电油墨喷涂操作。
249.由上述过程不难看出,本实施例中导电油墨喷涂装置3自动化程度高,利于提高导电油 墨喷涂效率,且采用涂刷工艺的方式,能够大大缩短整个柔性电极的制备时间。
250.如图21至图27所示,压花成型装置包括上压辊401、下压辊402、上压辊支撑机构、上 压辊旋转驱动机构、下压辊支撑机构以及下压辊旋转驱动机构。
251.其中,上压辊401位于下压辊402的上方。
252.上压辊401的辊体表面设有压花图案,用于柔性电极的压花成型,下压辊402的辊体表 面光滑,下压辊402用于配合上压辊401完成柔性电极的压花成型。
253.其中,用于制备柔性电极的压花图案的结构包括周期性蛇形、岛桥形或分形结构
等。
254.上压辊支撑机构与上压辊401相连,起到支撑上压辊401的作用。
255.如图25至图27所示,上压辊支撑机构包括两个上压辊支撑板403,其中,每个上压辊 支撑板403分别位于上压辊401的一端侧,例如图25中示出的左端侧和右端侧。
256.其中,在上压辊支撑板403上设有压辊安装孔404,上压辊401的每个辊轴分别对应伸 入一个压辊安装孔404内。通过以上设计,利于实现上压辊401的安装。
257.上压辊旋转驱动机构415位于上压辊401的侧部且与上压辊401相连,其作用是驱动上 压辊401旋转,该上压辊旋转驱动机构优选采用驱动电机。
258.本实施例中压花成型装置还包括门型支架405,两个上压辊支撑板403均安装于门型支 架405的顶梁上,在门型支架405的一个侧板上设有第一驱动机构安装板406。
259.上压辊旋转驱动机构安装于第一驱动机构安装板406上。
260.其中,上压辊旋转驱动机构的输出轴通过联轴器(未示出)与上压辊401的辊轴相连。
261.在上压辊旋转驱动机构的作用下,上压辊401可实现旋转。
262.如图22所示,第一驱动机构安装板406位于门型支架405的侧板的外侧,在侧板上对应 第一驱动机构安装板406的安装位置设有第一通孔407。
263.第一通孔407方便上压辊旋转驱动机构415穿过门型支架405的侧板。
264.下压辊支撑机构与下压辊402相连,起到支撑下压辊402的作用。
265.本实施例中下压辊支撑机构采用可升降式结构,便于调整下压辊402的高度,进而调整 上压辊401与下压辊402之间的压紧力,从而满足柔性电极的压花成型需求。
266.下压辊旋转驱动机构416位于下压辊402的侧部,且与下压辊402相连,其作用是驱动 下压辊402旋转,该下压辊旋转驱动机构优选采用驱动电机。
267.如图25至图27所示,下压辊支撑机构包括可升降支撑轴套以及下压辊支撑板408。
268.其中,下压辊支撑板408有两个。
269.每个下压辊支撑板408分别位于下压辊402的一端侧,例如图27中的左端侧和右端侧。
270.每个下压辊支撑板408上均设有一个竖向的条形孔409,其中,条形孔409的宽度与下 压辊辊轴的直径相等,使得下压辊支撑板408在条形孔409内只能上下调整。
271.以上下压辊支撑板设计,利于保证压花过程的稳定性。
272.可升降支撑轴套有两组,每组可升降支撑轴套对应位于一个下压辊支撑板409的外侧, 例如左侧的可升降支撑轴套位于左侧的下压辊支撑板409的外侧(即左侧)。
273.同理,右侧的可升降支撑轴套位于右侧的下压辊支撑板409的外侧(即右侧)。
274.以其中一组可升降支撑轴套为例:可升降支撑轴套包括升降单元410以及支撑轴套411, 其中,升降单元410的底部固定,升降单元410的顶部与支撑轴套411相连。
275.升降单元410优选采用伸缩电机,通过伸缩电机带动支撑轴套411的位置升高和下降。 当然,升降单元410不限于采用伸缩电机,例如还可以采用丝杠驱动单元等。
276.支撑轴套411具有与下压辊的辊轴相适应的安装轴孔,下压辊402的每个辊轴分别经由 一个下压辊支撑板的条形孔409穿出并伸入对应支撑轴套411(的安装轴孔)内。
277.为了实现下压辊旋转驱动机构的安装,本发明还进行了如下设计:
278.可升降支撑轴套还包括第二驱动机构安装板412。
279.第二驱动机构安装板412与支撑轴套411固连,例如焊接连接。
280.第二驱动机构安装板412为水平布置,且高度低于支撑轴套411安装轴孔的高度。
281.下压辊旋转驱动机构安装于第二驱动机构安装板412上。
282.同理,在门型支架405的侧板上对应下压辊旋转驱动机构的位置设有第二通孔413,第 二通孔413为竖向长孔,以提供下压辊旋转驱动机构416足够的安装和活动空间。
283.下压辊旋转驱动机构的输出轴通过联轴器(图中未示出)与下压辊的辊轴相连。
284.在下压辊旋转驱动机构的作用下,下压辊402可进行旋转。
285.本实施例中压花成型装置还包括输送带414,其中,输送带414的一端位于下压辊402 的下方,该输送带414为(由下压辊402位置向前下方)倾斜式布置。
286.通过输送带414便于将压花成型装置压花成型后的柔性电极及时运走。
287.此外,压花成型装置还包括产品箱9,其中,产品箱9位于输送带414的侧部或另一端。 通过人工能够将输送带414的柔性电极取下并放置在产品箱9内。
288.牵引装置5包括牵引辊501,其中,牵引辊501位于由上压辊401和下压辊402组成的 整体的前侧,牵引辊501配置有牵引电机502。
289.牵引辊501的轴线方向与上压辊401、下压辊402的轴线方向平行(均为左右方向)。
290.在牵引辊501的作用下,能够带动柔性薄膜7由后向前运行。
291.由于压花工艺之前的各道工序均是在柔性薄膜7上完成的,因此每当喷涂有导电油墨的 柔性薄膜区域到达上压辊401和下压辊402之间时均会被压花成型,得到柔性电极。
292.此外,在牵引辊501与由上压辊401和下压辊402组成的整体之间还设有过渡辊,例如 图22中第一过渡辊417和第二过渡辊418。
293.第一过渡辊417的高点与上压辊401和下压辊402之间的缝隙相平。
294.第二过渡辊418的高度低于第一过渡辊417的高度。
295.本实施例中压花成型装置的大致工作过程如下:
296.待柔性薄膜7上涂覆有导电油墨的区域到达压花成型装置工作区时,上压辊401和下压 辊402对柔性薄膜7进行压花成型操作,压出的柔性电极与柔性薄膜脱离;
297.其中柔性电极下落到输送带414上,并沿着输送带414继续往前输送,最终到达产品箱 9,而去除柔性电极的废料柔性薄膜7在经过第一、第二过渡辊,最终卷绕到牵引辊501上。
298.由上述过程不难看出,本实施例中压花成型工艺简单,压花成型装置自动化程度高,利 于提高压花成型的效率,适用于对柔性电极的大面积批量生产。
299.本实施例中加工设备还包括控制器(未示出),通过控制器利于实现对柔性薄膜水转印纸 成型装置2、导电油墨喷涂装置3、压花成型装置4以及牵引装置5等的控制。
300.此外,本实施例中加工设备还包括多个图像传感器,例如第一图像传感器t1、第二图像 传感器t2、第三图像传感器t3、第四图像传感器t4以及第五图像传感器t5。
301.第一图像传感器t1和第二图像传感器t2均设置于第一工作台面201的侧部;其中,第 一图像传感器t1对准pva溶液喷涂机构工作区。
302.第二图像传感器t2对准第一加热机构的上方,即水转印纸自动取放机构的工作区。
303.第三图像传感器t3设置于第二工作台面301的侧部。
304.第三图像传感器t3对准第二加热机构的上方,即导电油墨喷涂机构的工作区。
305.第四图像传感器t4以及第五图像传感器t5位于压花成型装置的侧部,其中,第四图像 传感器t4对准压花成型装置的入口位置,第五图像传感器t5对准输送带414。
306.通过第一图像传感器t1、第二图像传感器t2、第三图像传感器t3以及第四图像传感器 t4能够检测柔性薄膜上的相应区域是否到达设定工作区;
307.通过第五图像传感器t5则可以检测是否有柔性电极落到输送带414上。
308.此外,本实施例还在以上柔性电极的加工设备的基础上,提出了一种柔性电极的加工方 法。该柔性电极的加工方法包括如下步骤:
309.步骤1.在牵引装置5的带动下,柔性薄膜7沿着柔性薄膜7的运行方向运行,且每次柔 性薄膜7运行设定距离后停止;
310.步骤2.以上各个图像传感器分别对各个工作区进行监控;其中:
311.当第一图像传感器t1检测到柔性薄膜在pva溶液喷涂机构工作区时,pva溶液喷涂机 构动作,并在柔性薄膜7的表面均匀喷涂pva溶液。
312.其中,pva溶液喷涂机构动作的具体过程在上文中已经述及,此处不再赘述。
313.当第二图像传感器t2检测到带有pva溶液的柔性薄膜区域运行到第一加热机构221的 上方时,首先水转印纸自动取放机构将水转印纸219放置于该区域上方。
314.其中,水转印纸自动取放机构动作的具体过程在上文中已经述及,此处不再赘述。
315.然后第一加热机构221加热,使得柔性薄膜水转印纸能够快速成型。
316.至此,完成柔性薄膜水转印纸的制备工作。
317.当第三图像传感器t3检测到带有水转印纸的柔性薄膜区域运行到第二加热机构302的上 方时,首先导电油墨喷涂机构304在带有水转印纸的柔性薄膜区域喷涂导电油墨;
318.其中,导电油墨喷涂机构304动作的具体过程在上文中已经述及,此处不再赘述。
319.然后第二加热机构302加热,实现导电油墨的快速干燥处理。
320.其中,水转印纸219以及喷涂的导电油墨分别处于柔性薄膜7的相对侧表面。
321.至此,完成导电油墨的喷涂工作。
322.当第四图像传感器t4检测到有喷涂导电油墨的柔性薄膜区域到达压花成型装置4的入口 位置时,压花成型装置4启动,并实现压花操作,从而完成一次柔性电极的制备;
323.当第五图像传感器t5检测到有柔性电极落在输送带414上时,及时将柔性电极运走。
324.其中,压花成型装置4动作的具体过程在上文中已经述及,此处不再赘述。
325.步骤3.待以上各个工作区的操作均完成后,在牵引装置5的带动下,柔性薄膜7继续沿 着柔性薄膜的运行方向运行,且运行设定距离后停止;重复执行以上步骤2。
326.由上述过程不难看出,本发明加工工艺自动化程度高,能够实现柔性电极的大面积制备, 提高了柔性电极的生产效率,同时,本发明压花成型工艺大大降低了电极的生产成本。
327.当然,以上说明仅仅为本发明的较佳实施例,本发明并不限于列举上述实施例,应当说 明的是,任何熟悉本领域的技术人员在本说明书的教导下,所做出的所有等同替代、明显变 形形式,均落在本说明书的实质范围之内,理应受到本发明的保护。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。