技术特征:
1.一种机器人协同避障系统,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机可读指令,其特征在于,所述处理器执行所述计算机可读指令时实现如下步骤:在目标机器人的运行过程中,实时获取所述目标机器人的目标运动信息,同时获取与所述目标机器人通信连接的所有可移动设备的参考运动信息;根据所述目标运动信息以及所述参考运动信息,确定当前是否存在与所述目标机器人共同处于协同避障状态的所述可移动设备;在当前存在与所述目标机器人共同处于协同避障状态的所述可移动设备时,将处于协同避障状态的所述可移动设备记录为协同运动设备,并根据所述目标运动信息以及所述协同运动设备的参考运动信息,确定所述目标机器人和/或所述协同运动设备的协同避让信息;控制所述目标机器人和/或所述协同运动设备根据所述协同避让信息执行协同避让操作。2.如权利要求1所述的机器人协同避障系统,其特征在于,所述目标运动信息包括所述目标机器人的当前位置信息、当前运动方向以及第一目标位置信息;所述参考运动信息包括所述可移动设备的参考位置信息、参考运动方向以及第二目标位置信息;所述协同避障状态包括转角避障状态;所述根据所述目标运动信息以及所述参考运动信息,确定当前是否存在与所述目标机器人共同处于协同避障状态的所述可移动设备,包括:根据所述当前位置信息以及所述第一目标位置信息,确定所述目标机器人当前所处的目标行驶路段,同时根据所述参考位置信息以及所述第二目标位置信息确定各所述可移动设备当前所处的参考行驶路段;根据所述目标行驶路段与所述参考行驶路段确定所述目标机器人与各所述可移动设备之间的路段连接关系,同时根据所述当前运动方向与所述参考运动方向确定所述目标机器人与各所述可移动设备之间的运动方向关系;在所述目标机器人与至少一个所述可移动设备之间满足预设相交关系时,确定当前存在与所述目标机器人共同处于转角避障状态的可移动设备;所述预设相交关系是指所述目标机器人与所述可移动设备之间的所述路段连接关系为相交连接,且所述运动方向关系为交叉运行。3.如权利要求2所述的机器人协同避障系统,其特征在于,所述目标运动信息还包括当前运行速度;所述参考运动信息还包括参考运行速度;所述协同运动设备包括转角运动设备;所述在当前存在与所述目标机器人共同处于协同避障状态的所述可移动设备时,将处于协同避障状态的所述可移动设备记录为协同运动设备,并根据所述目标运动信息以及所述协同运动设备的参考运动信息,确定所述目标机器人的协同避让信息,包括:在当前存在与所述目标机器人共同处于所述转角避障状态的所述可移动设备时,将处于转角避障状态的所述可移动设备记录为所述转角运动设备;根据所述当前位置信息、当前运行速度,以及所述转角运动设备的参考位置信息和参考运行速度,确定所述协同避让信息。
4.如权利要求3所述的机器人协同避障系统,其特征在于,所述根据所述当前位置信息、当前运行速度,以及所述转角运动设备的参考位置信息和参考运行速度,确定所述协同避让信息,包括:获取相交连接的所述目标行驶路段与所述参考行驶路段的相交终点信息;根据所述当前位置信息以及所述相交终点信息,确定第一路段距离;同时根据所述参考位置信息以及所述相交终点信息,确定第二路段距离;根据所述第一路段距离以及所述当前运行速度,确定所述目标机器人的目标协同因子;同时根据所述第二路段距离以及所述参考运行速度,确定所述转角运动设备的参考协同因子;根据所述目标协同因子和所述参考协同因子确定所述协同避让信息。5.如权利要求4所述的机器人协同避障系统,其特征在于,所述根据所述目标协同因子和所述参考协同因子确定所述协同避让信息,包括:将所述目标协同因子与所述参考协同因子进行比较;在所述目标协同因子大于或等于所述参考协同因子时,确定所述协同避让信息为控制所述目标机器人正常运行;在所述目标协同因子小于所述参考协同因子时,确定所述协同避让信息为控制所述目标机器人针对所述转角运动设备执行预设避让操作。6.如权利要求1所述的机器人协同避障系统,其特征在于,所述目标运动信息包括所述目标机器人的当前位置信息、当前运动方向以及第一目标位置信息;所述参考运动信息包括与所述可移动设备的参考位置信息、参考运动方向以及第二目标位置信息;所述协同避障状态包括相向避障状态;所述根据所述目标运动信息以及所述参考运动信息,确定当前是否存在与所述目标机器人共同处于协同避障状态的所述可移动设备,包括:根据所述当前位置信息以及所述第一目标位置信息,确定所述目标机器人当前所处的目标行驶路段,同时根据所述参考位置信息以及所述第二目标位置信息,确定各所述可移动设备当前所处的参考行驶路段;根据所述目标行驶路段与所述参考行驶路段确定所述目标机器人与各所述可移动设备之间的路段连接关系,同时根据所述当前运动方向与所述参考运动方向确定所述目标机器人与各所述可移动设备之间的运动方向关系;在所述目标机器人与至少一个所述可移动设备之间满足预设相向关系时,确定当前存在与所述目标机器人共同处于相向避障状态的可移动设备;所述预设相向关系是指所述目标机器人与所述可移动设备之间的所述路段连接关系为相同路段,且所述运动方向关系为相向运行。7.如权利要求6所述的机器人协同避障系统,其特征在于,所述协同运动设备包括相向运动设备;所述在当前存在与所述目标机器人共同处于协同避障状态的所述可移动设备时,将处于协同避障状态的所述可移动设备记录为协同运动设备,并根据所述目标运动信息以及所述协同运动设备的参考运动信息,确定所述目标机器人的协同避让信息,包括:在当前存在与所述目标机器人共同处于所述相向避障状态的可移动设备时,将处于相
向避障状态的所述可移动设备记录为所述相向运动设备;根据所述当前位置信息以及所述相向运动设备的参考位置信息,确定位置信息差值;根据所述位置信息差值确定所述协同避让信息。8.如权利要求7所述的机器人协同避障系统,其特征在于,所述根据所述位置信息差值确定所述协同避让信息,包括:获取预设距离阈值,并将所述位置信息差值与预设距离阈值进行比较;在所述位置信息差值小于或等于所述预设距离阈值时,确定所述协同避让信息为控制所述目标机器人针对所述相向运动设备执行错位避让操作;在所述位置信息差值大于所述预设距离阈值时,确定所述协同避让信息为控制所述目标机器人正常运行。9.如权利要求1所述的机器人协同避障系统,其特征在于,所述控制所述目标机器人和/或所述协同运动设备根据所述协同避让信息执行协同避让操作,包括:将所述协同避让信息发送至所述协同运动设备,以在所述协同运动设备根据接收到的所述协同避让信息进行校验之后,获取所述协同运动设备反馈的避让校验结果;在所述避让校验结果为正确校验结果时,控制所述目标机器人根据所述协同避让信息执行协同避让操作;在所述避让校验结果为错误校验结果时,控制所述目标机器人执行预设应急操作。10.如权利要求1所述的机器人协同避障系统,其特征在于,所述处理器执行所述计算机可读指令时还实现如下步骤:在所述目标机器人的运行过程中,通过预设感知方法检测预设障碍物信息;所述预设障碍物信息包括静态障碍物信息以及动态障碍物信息;所述动态障碍物信息包括所述可移动设备的设备障碍物信息;控制所述目标机器人根据所述预设障碍物信息执行障碍物避让操作。11.一种机器人,其特征在于,包括用于执行如权利要求1至10任一项所述机器人协同避障系统。12.一种机器人协同避障方法,其特征在于,包括:在目标机器人的运行过程中,实时获取所述目标机器人的目标运动信息,同时获取与所述目标机器人通信连接的所有可移动设备的参考运动信息;根据所述目标运动信息以及所述参考运动信息,确定当前是否存在与所述目标机器人共同处于协同避障状态的所述可移动设备;在当前存在与所述目标机器人共同处于协同避障状态的所述可移动设备时,将处于协同避障状态的所述可移动设备记录为协同运动设备,并根据所述目标运动信息以及所述协同运动设备的参考运动信息,确定所述目标机器人和/或所述协同运动设备的协同避让信息;控制所述目标机器人和/或所述协同运动设备根据所述协同避让信息执行协同避让操作。13.如权利要求12所述的机器人协同避障方法,其特征在于,所述目标运动信息包括所述目标机器人的当前位置信息、当前运动方向以及第一目标位置信息;所述参考运动信息包括与所述可移动设备的参考位置信息、参考运动方向以及第二目标位置信息;所述协同
避障状态包括转角避障状态;所述根据所述目标运动信息以及所述参考运动信息,确定当前是否存在与所述目标机器人共同处于协同避障状态的所述可移动设备,包括:根据所述当前位置信息以及所述第一目标位置信息,确定所述目标机器人当前所处的目标行驶路段,同时根据所述参考位置信息以及所述第二目标位置信息,确定各所述可移动设备当前所处的参考行驶路段;根据所述目标行驶路段与所述参考行驶路段确定所述目标机器人与各所述可移动设备之间的路段连接关系,同时根据所述当前运动方向与所述参考运动方向确定所述目标机器人与各所述可移动设备之间的运动方向关系;在所述目标机器人与至少一个所述可移动设备之间满足预设相交关系时,确定当前存在与所述目标机器人共同处于转角避障状态的可移动设备;所述预设相交关系是指所述目标机器人与所述可移动设备之间的所述路段连接关系为相交连接,且所述运动方向关系为交叉运行。14.如权利要求13所述的机器人协同避障方法,其特征在于,所述目标运动信息还包括当前运行速度;所述参考运动信息还包括参考运行速度;所述协同运动设备包括转角运动设备;所述在当前存在与所述目标机器人共同处于协同避障状态的所述可移动设备时,将处于协同避障状态的所述可移动设备记录为协同运动设备,并根据所述目标运动信息以及所述协同运动设备的参考运动信息,确定所述目标机器人的协同避让信息,包括:在当前存在与所述目标机器人共同处于所述转角避障状态的所述可移动设备时,将处于转角避障状态的所述可移动设备记录为转角运动设备;根据所述当前位置信息、当前运行速度,以及所述转角运动设备的参考位置信息和参考运行速度,确定所述协同避让信息。15.如权利要求14所述的机器人协同避障方法,其特征在于,所述根据所述当前位置信息、当前运行速度,以及所述转角运动设备的参考位置信息和参考运行速度,确定所述协同避让信息,包括:获取相交连接的所述目标行驶路段与所述参考行驶路段的相交终点信息;根据所述当前位置信息以及所述相交终点信息,确定第一路段距离;同时根据所述参考位置信息以及所述相交终点信息,确定第二路段距离;根据所述第一路段距离以及所述当前运行速度,确定所述目标机器人的目标协同因子;同时根据所述第二路段距离以及所述参考运行速度,确定所述转角运动设备的参考协同因子;根据所述目标协同因子和所述参考协同因子确定所述协同避让信息。16.如权利要求15所述的机器人协同避障方法,其特征在于,所述根据所述目标协同因子和所述参考协同因子确定所述协同避让信息,包括:将所述目标协同因子与所述参考协同因子进行比较;在所述目标协同因子大于或等于所述参考协同因子时,确定所述协同避让信息为控制所述目标机器人正常运行;在所述目标协同因子小于所述参考协同因子时,确定所述协同避让信息为控制所述目
标机器人针对所述转角运动设备执行预设避让操作。17.如权利要求12所述的机器人协同避障方法,其特征在于,所述目标运动信息包括所述目标机器人的当前位置信息、当前运动方向以及第一目标位置信息;所述参考运动信息包括与所述可移动设备的参考位置信息、参考运动方向以及第二目标位置信息;所述协同避障状态包括相向避障状态;所述根据所述目标运动信息以及所述参考运动信息,确定当前是否存在与所述目标机器人共同处于协同避障状态的所述可移动设备,包括:根据所述当前位置信息以及所述第一目标位置信息,确定所述目标机器人当前所处的目标行驶路段,同时根据所述参考位置信息以及所述第二目标位置信息,确定各所述可移动设备当前所处的参考行驶路段;根据所述目标行驶路段与所述参考行驶路段确定所述目标机器人与各所述可移动设备之间的路段连接关系,同时根据所述当前运动方向与所述参考运动方向确定所述目标机器人与各所述可移动设备之间的运动方向关系;在所述目标机器人与至少一个所述可移动设备之间满足预设相向关系时,确定当前存在与所述目标机器人共同处于相向避障状态的可移动设备;所述预设相向关系是指所述目标机器人与所述可移动设备之间的所述路段连接关系为相同路段,且所述运动方向关系为相向运行。18.如权利要求17所述的机器人协同避障方法,其特征在于,所述协同运动设备包括相向运动设备;所述在当前存在与所述目标机器人共同处于协同避障状态的所述可移动设备时,将处于协同避障状态的所述可移动设备记录为协同运动设备,并根据所述目标运动信息以及所述协同运动设备的参考运动信息,确定所述目标机器人的协同避让信息,包括:在当前存在与所述目标机器人共同处于所述相向避障状态的可移动设备时,将处于转角避障状态的所述可移动设备记录为相向运动设备;根据所述当前位置信息以及所述相向运动设备的参考位置信息,确定位置信息差值;根据所述位置信息差值确定所述协同避让信息。19.如权利要求18所述的机器人协同避障方法,其特征在于,所述根据所述位置信息差值确定所述协同避让信息,包括:获取预设距离阈值,并将所述位置信息差值与预设距离阈值进行比较;在所述位置信息差值小于或等于所述预设距离阈值时,确定所述协同避让信息为控制所述目标机器人针对所述相向运动设备执行错位避让操作;在所述位置信息差值大于所述预设距离阈值时,确定所述协同避让信息为控制所述目标机器人正常运行。20.如权利要求12所述的机器人协同避障方法,其特征在于,所述控制所述目标机器人和/或所述协同运动设备根据所述协同避让信息执行协同避让操作,包括:将所述协同避让信息发送至所述协同运动设备,以在所述协同运动设备根据接收到的所述协同避让信息进行校验之后,获取所述协同运动设备反馈的避让校验结果;在所述避让校验结果为正确校验结果时,控制所述目标机器人根据所述协同避让信息执行协同避让操作;
在所述避让校验结果为错误校验结果时,控制所述目标机器人执行预设应急操作。21.如权利要求12所述的机器人协同避障方法,其特征在于,所述机器人协同避障方法还包括:在所述目标机器人的运行过程中,通过预设感知方法检测预设障碍物信息;所述预设障碍物信息包括静态障碍物信息以及动态障碍物信息;所述动态障碍物信息包括所述可移动设备的设备障碍物信息;控制所述目标机器人根据所述预设障碍物信息执行障碍物避让操作。22.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求12至21任一项所述机器人协同避障方法。
技术总结
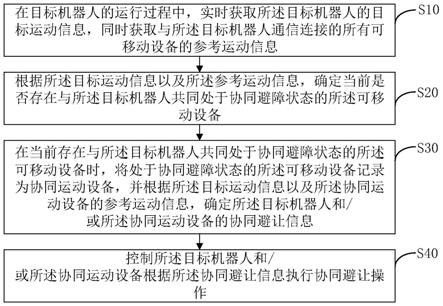
本发明公开了一种机器人协同避障系统、方法、机器人及存储介质,通过在目标机器人的运行过程中,实时获取目标机器人的目标运动信息,同时获取与目标机器人通信连接的所有可移动设备的参考运动信息;根据目标运动信息以及参考运动信息,确定当前是否存在与目标机器人共同处于协同避障状态的可移动设备;在当前存在与目标机器人共同处于协同避障状态的所述可移动设备时,将处于协同避障状态的可移动设备记录为协同运动设备,并根据目标运动信息以及协同运动设备的参考运动信息,确定目标机器人和/或协同运动设备的协同避让信息;控制目标机器人和/或协同运动设备根据协同避让信息执行协同避让操作。本发明提高了目标机器人运行的安全性。行的安全性。行的安全性。
技术研发人员:吴栋校
受保护的技术使用者:深圳市普渡科技有限公司
技术研发日:2021.08.04
技术公布日:2021/12/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。