技术特征:
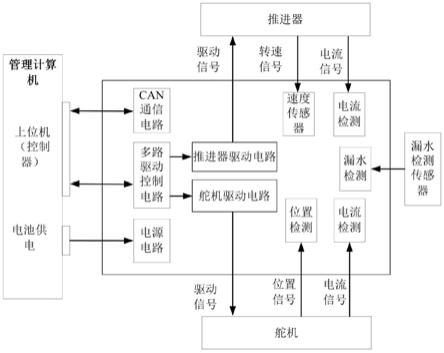
1.一种水下机器人推进器及舵机一体化控制系统,其特征在于,所述系统包括:至少一路推进器驱动电路及受其驱动的推进器、至少一路舵机驱动电路及受其驱动的舵机、电源电路、多路驱动控制电路、控制器;其中,所述控制器用于生成互补的推进器控制信号和互补的舵机控制信号;所述驱动控制电路用于处理所述互补的推进器控制信号得到互补的推进器驱动信号,还用于处理所述互补的舵机控制信号得到互补的舵机驱动信号;所述推进器驱动电路基于所述互补的推进器驱动信号,驱动所述推进器驱动电路工作;所述舵机驱动电路基于所述互补的舵机驱动信号,驱动所述舵机驱动电路工作;所述电源电路用于提供28v电压,并由28v电压隔离滤波生成5v电压,5v电压隔离滤波生成3.3v电压;5v电压和3.3v电压作为所述驱动控制电路的供电电压。2.根据权利要求1所述的水下机器人推进器及舵机一体化控制系统,其特征在于,所述驱动控制电路包括双向缓冲器、光耦开关;其中,隔离滤波得到的3.3v电压接入所述双向缓冲器的vccb端,还串联电阻后接入所述光耦开关的vf1 端;隔离滤波得到的5v电压接入所述双向缓冲器的vcca端,还接入所述光耦开关的vcc端;所述光耦开关的vcc端串联电容后接地,所述光耦开关的vo1端串联上拉电阻后接地,所述光耦开关的vo1端还连接至所述双向缓冲器的使能端;当所述双向缓冲器接收所述互补的推进器控制信号时,其输出为所述互补的推进器驱动信号;当所述双向缓冲器接收所述互补的舵机控制信号时,其输出为所述互补的舵机驱动信号。3.根据权利要求2所述的水下机器人推进器及舵机一体化控制系统,其特征在于,所述系统还包括:分别安装于电源电路总出口、所述推进器的供电母线处、舵机的供电母线处的电流传感器,多路电流检测电路和can通信电路;所述电流检测电路,用于采集电源电路总电流、所述推进器的供电母线处的电流以及所述舵机的供电母线处的电流,并判断各电流是否超过其电流阈值,若某路电流超过其电流阈值,将通过所述can通信电路通知所述控制器,以便由控制器切断该路供电。4.根据权利要求3所述的水下机器人推进器及舵机一体化控制系统,其特征在于,所述系统还包括在所述系统内部多处安装的漏水检测传感器、漏水检测电路;所述漏水检测电路,用于接收所述漏水检测传感器采集到的漏水开关信号,并根据所述漏水开关信号判断是否漏水,若漏水,将通过所述can通信电路通知所述控制器,以便由控制器切断漏水部位电路的供电。5.根据权利要求1-4中任一项所述的水下机器人推进器及舵机一体化控制系统,其特征在于,所述推进器还包括速度传感器、推进器伺服电机和减速器;所述速度传感器用于采集推进器螺旋桨的转轴转速信号;所述控制器接收并处理所述转轴转速信号,生成所述互补的推进器控制信号;利用所述互补的推进器驱动信号的差值的绝对值,确定驱动所述推进器驱动电路工作的占空比,利用所述互补的推进器驱动信号的差值的正负号,确定驱动所述推进器伺服电机转动的方向,通过所述推进器驱动电路控制所述推进器伺服电机转动,所述推进器伺服电机通过所述减速器驱动所述推进器螺旋桨的转轴转动。
6.根据权利要求5所述的水下机器人推进器及舵机一体化控制系统,其特征在于,所述控制器通过执行以下操作生成所述互补的推进器控制信号:所述控制器将接收到的所述转轴转速信号与推进器转轴转速控制指令信号进行比较,经模糊pid控制算法处理得到期望转轴转速信号和期望转轴转向,基于所述期望转轴转速信号和期望转轴转向,生成所述互补的推进器控制信号;所述互补的推进器控制信号的差值的绝对值为所述期望转速信号归一化后的结果;所述互补的推进器控制信号的差值的正负号对应于所述期望转轴转向。7.根据权利要求5所述的水下机器人推进器及舵机一体化控制系统,其特征在于,所述舵机还包括角度位移传感器、舵机伺服电机和谐波减速器;所述角度位移传感器用于采集舵机的位置信号;所述控制器接收并处理所述舵机的位置信号,生成所述互补的舵机控制信号;利用所述互补的舵机驱动信号的差值的绝对值,确定驱动所述舵机驱动电路工作的占空比,利用所述互补的舵机驱动信号的差值的正负号,确定驱动所述舵机伺服电机转动的方向,通过所述舵机驱动电路控制所述舵机伺服电机转动,所述舵机伺服电机通过所述谐波减速器驱动控制舵机偏转。8.根据权利要求7所述的水下机器人推进器及舵机一体化控制系统,其特征在于,所述控制器通过执行以下操作得到所述互补的舵机控制信号:所述控制器将接收到的所述位置信号与舵机位置控制指令信号进行比较,经模糊pid控制算法处理得到所述期望位置信号和期望舵机转向,基于所述期望位置信号和期望舵机转向,生成所述互补的舵机控制信号;所述互补的舵机控制信号的差值的绝对值为所述期望位置信号归一化后的结果;所述互补的推进器控制信号的差值的正负号对应于所述期望舵机转向。9.根据权利要求8所述的水下机器人推进器及舵机一体化控制系统,其特征在于,所述系统还包括第一ad采样电路,用于将所述转轴转速信号转化成相应的数字信号后经由所述can通信控制电路发送至所述控制器。10.根据权利要求9所述的水下机器人推进器及舵机一体化控制系统,其特征在于,所述系统还包括和第二ad采样电路,用于将所述位置信号转化成相应的数字信号后经由所述can通信控制电路发送至所述控制器。
技术总结
本发明涉及一种水下机器人推进器及舵机一体化控制系统,涉及水下机器人技术领域,解决了现有技术水下机器人推进器及舵机一体化控制过程中移植性差、维护困难的问题。系统包括:至少一路推进器驱动电路及受其驱动的推进器、至少一路舵机驱动电路及受其驱动的舵机、电源电路、多路驱动控制电路、控制器;其中,控制器用于生成互补的推进器控制信号和互补的舵机控制信号;驱动控制电路用于处理互补的推进器控制信号得到互补的推进器驱动信号,还用于处理互补的舵机控制信号得到互补的舵机驱动信号;推进器驱动电路基于互补的推进器驱动信号,驱动推进器驱动电路工作;舵机驱动电路基于互补的舵机驱动信号,驱动舵机驱动电路工作。作。作。
技术研发人员:邓超 马俊 唐旭东 郭威 马文桥 李永强 李兆凯 付星星
受保护的技术使用者:北京机械设备研究所
技术研发日:2020.05.29
技术公布日:2021/12/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。