1.本发明涉及深海取样工具技术领域,尤其是一种自上浮深海生物取样装置。
背景技术:
2.近年来,海洋生物学家纷纷通过深海潜器,如蛟龙号载人潜水器或缆控机器人(rov)等对深海生物进行实时观测,并对有价值的微生物和宏生物样品通过深海潜器艏部搭载的机械手进行深海取样,并通过固定搭载在艏部托盘上的采样篮进行收集和存储,以便于上岸后的实验室观测、培养与研究。通过深海潜器完成深海生物的取样,常常需要租用大吨位的水面母船进行潜器的布放和回收保障,这样一方面涉及的保障人员多,花费的经费大,另一方面在海况稍恶劣的情况下,极有可能造成深海潜器丢失或者发生事故。
技术实现要素:
3.本技术人针对上述现有生产技术中的缺点,提供一种自上浮深海生物取样装置,从而可以从水面母船上抛下,并可坐沉海底完成自主取样,并可抛锚自上浮的深海生物取样装置,工作可靠性好。
4.本发明所采用的技术方案如下:
5.一种自上浮深海生物取样装置,包括浮力材料壳体,所述浮力材料壳体的结构为:包括主体,所述主体外形呈椭球型结构,所述主体的中心位置设置有存储球孔,所述主体的上部中间位置设置有样品通道,所述样品通道与存储球孔贯通,位于样品通道一侧的主体上设置有信标孔,所述存储球孔的底部设置有氧气舱孔,沿着主体周向均布有多个透水孔,每个透水孔与存储球孔贯穿,所述主体的底部两侧位置分别设置有抛锚缺口,抛锚缺口处还设置有安装座孔;
6.所述信标孔中安装有信标,所述存储球孔中安装有存储球舱,氧气舱孔中安装高压氧气舱,安装座孔上配合安装座,同时安装座与存储球舱的球形外壁焊接,安装座的底部通过爆炸螺栓固定重力锚,同时重力锚位于抛锚缺口中;
7.位于存储球舱的顶面安装有自动启闭舱口盖;
8.存储球舱内底部位置设置有驱动控制舱,驱动控制舱内安装有控制模块和锂电池组;
9.位于驱动控制舱的外围以及存储球舱内部下半球位置分布有导热硅胶材料,位于导热硅胶材料上方的存储球舱内还设置有多个深度计和诱饵。
10.其进一步技术方案在于:
11.所述主体的截面呈椭圆形结构。
12.所述自动启闭舱口盖的安装结构为:包括盖板,所述盖板的密封接触面呈锥面状,盖板的外围安装有方型密封圈,盖板的背部呈圆弧状,绞支座焊接在盖板的背部,摇臂的左端与绞支座通过销轴连接在一起,摇臂的右端通过销轴连接在基座的孔中,电机的壳体固定连接在基座上,电机的伸出轴通过键连接在摇臂的右端,同时基座固定在存储球舱的内
壁面。
13.所述存储球舱的结构为:包括耐压壳,耐压壳的上方中间设置有开口,开口处设置有围壁,围壁中间为内圆锥面,所述围壁配合安装自动启闭舱口盖,所述耐压壳的外壁面设置有对称的水贯穿法兰和气贯穿法兰。
14.所述安装座的结构为:包括弧形面板,所述弧形面板的底部向下延伸有肘板,肘板的底部开有螺纹孔。
15.所述驱动控制舱为一球形舱体。
16.所述驱动控制舱内部中间位置设置有隔板,隔板的上方安装控制模块,隔板的下方摆放锂电池组。
17.所述深度计共配置有两只,互为备用。
18.还包括一根不锈钢管,所述不锈钢管从浮力材料壳体的外部贯穿至存储球舱的内部,并顺序连接过滤器和电动阀。
19.浮力材料壳体的内部设置有溢流阀,溢流阀下端连接高压气管,高压气管穿至高压氧气舱内,溢流阀上端连接高压气管,高压气管穿过存储球舱进入存储球舱内部,并连接电磁阀。
20.本发明的有益效果如下:
21.本发明结构紧凑、合理,操作与使用方便,通过水面母船直接抛入海中,利用自身的椭球型外形,可以快速下沉至预定海底,并通过不倒翁的设计原理,其坐沉海底时可以保持竖直状态,同时利用压力平衡系统完成取样舱的压力平衡并完成诱捕取样,并通过高压氧气补压完成上浮时压力降低过程中的取样点压力维持及给深海生物持续补氧,较好的解决了传统深海生物取样水面保障难、费用高且无法维持取样样品原位特性的现状。
22.本发明主要用于为深海生物取样、保压存储及无动力上浮于一体的装置。
附图说明
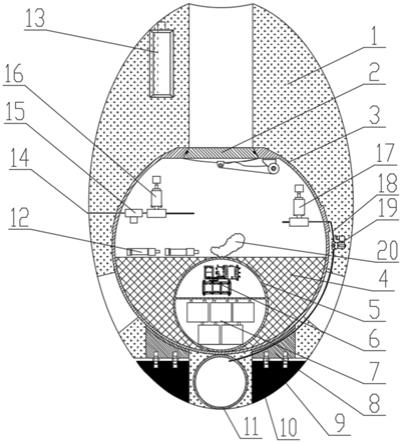
23.图1为本发明的结构示意图(自动启闭舱口盖关闭状态)。
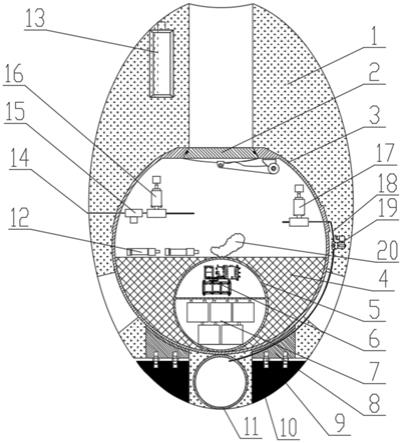
24.图2为本发明的结构示意图(自动启闭舱口盖打开状态)。
25.图3为本发明浮力材料壳体的结构示意图。
26.图4为本发明自动启闭舱口盖的安装示意图。
27.图5为本发明存储球舱的截面图。
28.图6为本发明安装座的结构示意图。
29.其中:1、浮力材料壳体;2、自动启闭舱口盖;3、存储球舱;4、导热硅胶材料;5、驱动控制舱;6、控制模块;7、锂电池组;8、安装座;9、爆炸螺栓;10、重力锚;11、高压氧气舱;12、深度计;13、信标;14、不锈钢管;15、过滤器;16、电动阀;17、电磁阀;18、高压气管;19、溢流阀;20、诱饵;
30.101、主体;102、样品通道;103、信标孔;104、存储球孔;105、透水孔;106、抛锚缺口;107、安装座孔;108、氧气舱孔;
31.201、盖板;202、方型密封圈;203、绞支座;204、摇臂;205、电机;206、基座;
32.301、围壁;302、耐压壳;303、水贯穿法兰;304、气贯穿法兰;305、内圆锥面;
33.801、弧形面板;802、肘板;803、螺纹孔。
具体实施方式
34.下面结合附图,说明本发明的具体实施方式。
35.如图1
‑
图6所示,本实施例的自上浮深海生物取样装置,包括浮力材料壳体1,浮力材料壳体1的结构为:包括主体101,主体101外形呈椭球型结构,主体101的中心位置设置有存储球孔104,主体101的上部中间位置设置有样品通道102,样品通道102与存储球孔104贯通,位于样品通道102一侧的主体101上设置有信标孔103,存储球孔104的底部设置有氧气舱孔108,沿着主体101周向均布有多个透水孔105,每个透水孔105与存储球孔104贯穿,主体101的底部两侧位置分别设置有抛锚缺口106,抛锚缺口106处还设置有安装座孔107;
36.信标孔103中安装有信标13,存储球孔104中安装有存储球舱3,氧气舱孔108中安装高压氧气舱11,安装座孔107上配合安装座8,同时安装座8与存储球舱3的球形外壁焊接,安装座8的底部通过爆炸螺栓9固定重力锚10,同时重力锚10位于抛锚缺口106中;
37.位于存储球舱3的顶面安装有自动启闭舱口盖2;
38.存储球舱3内底部位置设置有驱动控制舱5,驱动控制舱5内安装有控制模块6和锂电池组7;
39.位于驱动控制舱5的外围以及存储球舱3内部下半球位置分布有导热硅胶材料4,位于导热硅胶材料4上方的存储球舱3内还设置有多个深度计12和诱饵20。
40.主体101的截面呈椭圆形结构。
41.自动启闭舱口盖2的安装结构为:包括盖板201,盖板201的密封接触面呈锥面状,盖板201的外围安装有方型密封圈202,盖板201的背部呈圆弧状,绞支座203焊接在盖板201的背部,摇臂204的左端与绞支座203通过销轴连接在一起,摇臂204的右端通过销轴连接在基座206的孔中,电机205的壳体固定连接在基座206上,电机205的伸出轴通过键连接在摇臂204的右端,同时基座206固定在存储球舱3的内壁面。
42.存储球舱3的结构为:包括耐压壳302,耐压壳302的上方中间设置有开口,开口处设置有围壁301,围壁301中间为内圆锥面305,围壁301配合安装自动启闭舱口盖2,耐压壳302的外壁面设置有对称的水贯穿法兰303和气贯穿法兰304。
43.安装座8的结构为:包括弧形面板801,弧形面板801的底部向下延伸有肘板802,肘板802的底部开有螺纹孔803。
44.驱动控制舱5为一球形舱体。
45.驱动控制舱5内部中间位置设置有隔板,隔板的上方安装控制模块6,隔板的下方摆放锂电池组7。
46.深度计12共配置有两只,互为备用。
47.还包括一根不锈钢管14,不锈钢管14从浮力材料壳体1的外部贯穿至存储球舱3的内部,并顺序连接过滤器15和电动阀16。
48.浮力材料壳体1的内部设置有溢流阀19,溢流阀19下端连接高压气管18,高压气管18穿至高压氧气舱11内,溢流阀19上端连接高压气管18,高压气管18穿过存储球舱3进入存储球舱3内部,并连接电磁阀17。
49.本发明的具体结构和功能如下:
50.主要包括浮力材料壳体1、自动启闭舱口盖2、存储球舱3、导热硅胶材料4、驱动控制舱5、控制模块6、锂电池组7、安装座8、爆炸螺栓9、重力锚10、高压氧气舱11、深度计12、信
标13、不锈钢管14、过滤器15、电动阀16、电磁阀17、高压气管18、溢流阀19、诱饵20。
51.其中浮力材料壳体1的外形呈椭球型,主要包括主体101、样品通道102、信标孔103、存储球孔104、透水孔105、抛锚缺口106、安装座孔107、氧气舱孔108。
52.其中存储球孔104位于主体101的中心位置,样品通道102从主体101的顶部贯通至存储球孔104,信标孔103位于样品通道102的左侧,氧气舱孔108位于存储球孔104的底部,透水孔105共有四个,沿着主体101周向均布,每个透水孔105均贯穿至存储球孔104,抛锚缺口106位于主体101的底部两侧,其顶面与侧面呈直角状,抛锚缺口106的顶面开有安装座孔107。
53.其中自动启闭舱口盖2主要包括盖板201、方型密封圈202、绞支座203、摇臂204、电机205、基座206。
54.其中盖板201的密封接触面呈锥面状,方型密封圈202位于该锥面结构上,盖板201的背部呈圆弧状,绞支座203焊接在盖板201的圆弧状背部,摇臂204的左端与绞支座203通过销轴连接在一起,摇臂204的右端通过销轴连接在基座206的孔中,电机205的壳体固定连接在基座206上,电机205的伸出轴通过键连接在摇臂204的右端。
55.其中存储球舱3主要包括围壁301、耐压壳302、水贯穿法兰303、气贯穿法兰304、内圆锥面305。
56.其中安装座8主要包括弧形面板801、肘板802、螺纹孔803。
57.其中信标13位于浮力材料壳体1的信标孔103中,存储球舱3位于存储球孔104中,高压氧气舱11位于氧气舱孔108中,安装座8位于安装座孔107中,安装座8的弧形面板801焊接在存储球舱3的球形外壁上,重力锚10位于抛锚缺口106中,重力锚10通过爆炸螺栓9连接在安装座8的螺纹孔803上。
58.自动启闭舱口盖2通过其基座206焊接在存储球舱3的围壁301的底面,自动启闭舱口盖2的盖板201的锥面配合在存储球舱3的内圆锥面305内,方型密封圈202位于配合的锥面之间。
59.驱动控制舱5为一球形舱体,整体位于存储球舱3内靠底部位置,驱动控制舱5的内部分为上下两层,上层摆放控制模块6,下层摆放锂电池组7。
60.导热硅胶材料4整体位于存储球舱3内部的下半球位置,其内侧周向包裹着驱动控制舱5,外侧与存储球舱3的球形内壁紧贴。
61.深度计12共配置有两只,互为备用,其与诱饵20共同布置于存储球舱3内,导热硅胶材料4的顶面上。
62.不锈钢管14穿过浮力材料壳体1和存储球舱3的水贯穿法兰303后进入存储球舱3内,并顺序连接过滤器15和电动阀16。溢流阀19位于浮力材料壳体1内,溢流阀19下端连接高压气管18,左端高压气管18穿至高压氧气舱11内,溢流阀19上端连接高压气管18,右端高压气管18穿过存储球舱3的气贯穿法兰304后进入存储球舱3内,并连接电磁阀17。
63.实际工作过程中:
64.水面母船航行至预取样海域,并通过船载设备实时测量预取样海域的水深,然后在水面母船上,通过控制模块6驱动控制电机205旋转,直至将自动启闭舱口盖2盖紧在存储球舱3的围壁301上,同时控制溢流阀19将其溢流压力调整至比预取样海底的压力稍大0.5mpa,然后控制模块6将电磁阀17打开,高压氧气舱11中的高压氧气通过高压气管18、溢
流阀19、电磁阀17后注入到存储球舱3中,确保存储球舱3中充满高压氧气,而后关闭溢流阀19和电磁阀17。之后将本发明的自上浮深海生物取样装置抛入海中,其自身处于负浮力状态,且其外形呈椭球型,其会以较快的速度自由下沉至海底,在其下沉过程中,锂电池组7给整个装置提供动力,控制模块6实时读取深度计12逐渐增大的数值,当读取的深度计12的数值不再变化时,证明自上浮深海生物取样装置已经触到海底,当其坐沉海底后,由于其重心位置偏下,类似于不倒翁,其落地后会保持竖直状态,此时控制模块6控制电动阀16开启,存储球舱3由于压力稍大于外界压力0.5mpa,其舱内的高压氧气会通过电动阀16、过滤器15、不锈钢管14后溢出舱外,同时舷外高压海水会通过不锈钢管14、过滤器15、电动阀16后进入到存储球舱3中,同时实时监测深度计12的压力变化,当压力不再变化时,证明存储球舱3的内外压力已经平衡,此时控制模块6驱动控制电机205反向旋转,直至将自动启闭舱口盖2开启,开启一段时间后,深海生物在诱饵20的诱惑下纷纷通过浮力材料壳体1的样品通道102进入到存储球舱3中,然后通过控制模块6驱动控制电机205旋转,直至将自动启闭舱口盖2盖紧在存储球舱3的围壁301上,同时控制电动阀16关闭,并将溢流阀19的溢流压力调整至深度计12的当前显示压力,之后,控制模块6使得爆炸螺栓9得电,爆炸螺栓9内的火药爆炸将螺栓炸断,重力锚10在重力作用下从抛锚缺口106中落下,然后本发明的自上浮深海生物取样装置由于损失了重力锚10的重力作用,立刻呈现正浮力状态,并开始快速上浮,在上浮过程中,外界压力逐渐减小,但由于溢流阀19的作用,可以确保存储球舱3的压力始终维持在取样深度的压力值。当本发明的自上浮深海生物取样装置上浮至近水面时,通过水面母船搭载的超短基线换能器实时搜寻信标13的位置,并通过该位置坐标实施对本装置的打捞回收。
65.以上描述是对本发明的解释,不是对发明的限定,本发明所限定的范围参见权利要求,在本发明的保护范围之内,可以作任何形式的修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。