技术特征:
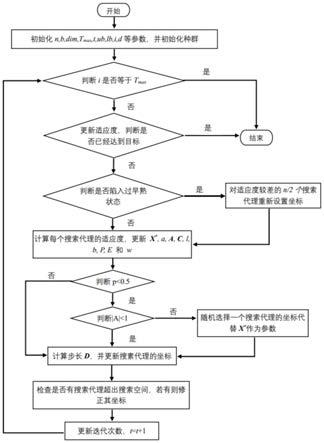
1.基于对数型收敛因子与聚合势能的鲸鱼优化方法,其特征在于:按如下步骤进行:步骤1:初始化参数;设定搜索代理数量n,远大于n的整数n1,螺旋形线性参数b,函数维度dim,最大代数t
max
,迭代初值t=1;确定优化目标与搜索区域;其中,搜索区域由目标函数的定义具体给出,ub表示搜索上界,lb表示搜索下界,i表示第几个搜索代理,d表示求解纬度;步骤2:利用式(1)cubic混沌模型n1 n个dim维向量,并通过式(2)依据搜索区域将向量各维度映射到限定区域内,分别计算适应度值,选取适应度最差的n个点为初始化搜索代理;理;步骤3:根据具体问题模型确定当前各搜索代理的适应度值并比较,更新当前适应度最好的搜索代理为最优目标,位置坐标为x
*
;步骤4:通过式(3)更新参数对数型收敛因子a,其中,r
a
、r
c
均为[0,1]之间的随机变量;分别通过式(4)、(5)更新参数式a、c;a=2a
·
r
a
‑
a
ꢀꢀꢀꢀ
(3)c=2
·
r
c
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)步骤5:通过式(6)更新聚合势能e,通过式(7)更新参数自适应权重w;其中,w1、w2为初始最小惯性权重和最大权重;最小惯性权重和最大权重;步骤6:根据聚合势能e与当前最优适应度值判断算法是否陷入过早熟状态,若聚合势能无限接近0且最优适应度未达到理想最优,则判断进入过早熟状态;通过步骤2重新生成
n/2个点,并替换当前适应度最差的n/2个搜索代理;若未进入,则跳过;步骤7:更新随机参数变量l、p,其中,在l用于控制螺旋形运动幅度,取值在[
‑
1,1]之间,p用于控制位置更新,在[0,1]之间;分别比较判断参数p、a的值,确定搜索代理的位置更新表达式,通过式(8)更新搜索代理的位置;步骤8:更新迭代次数t;与最大迭代次数t
max
进行比较,若t≤t
max
,则回到步骤3;若t>t
max
,则结束搜索。2.基于对数型收敛因子与聚合势能的鲸鱼优化系统,其特征在于:包括如下模块:参数初始化模块:初始化参数;设定搜索代理数量n,远大于n的整数n1,螺旋形线性参数b,函数维度dim,最大代数t
max
,迭代初值t=1;确定优化目标与搜索区域;其中,搜索区域由目标函数的定义具体给出,ub表示搜索上界,lb表示搜索下界,i表示第几个搜索代理,d表示求解纬度;适应度值计算模块:利用式(1)cubic混沌模型n1 n个dim维向量,并通过式(2)依据搜索区域将向量各维度映射到限定区域内,分别计算适应度值,选取适应度最差的n个点为初始化搜索代理;化搜索代理;更新当前适应度最优搜索代理模块:根据具体问题模型确定当前各搜索代理的适应度值并比较,更新当前适应度最好的搜索代理为最优目标,位置坐标为x
*
;更新参数对数型收敛因子模块:通过式(3)更新参数对数型收敛因子a,其中,r
a
、r
c
均为[0,1]之间的随机变量;分别通过式(4)、(5)更新参数式a、c;a=2a
·
r
a
‑
a
ꢀꢀꢀꢀ
(3)c=2
·
r
c
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)更新聚合势能、参数自适应权重模块:通过式(6)更新聚合势能e,通过式(7)更新参数自适应权重w;其中,w1、w2为初始最小惯性权重和最大权重;
判断是否陷入过早熟模块:根据聚合势能e与当前最优适应度值判断算法是否陷入过早熟状态,若聚合势能无限接近0且最优适应度未达到理想最优,则判断进入过早熟状态;通过适应度值计算模块重新生成n/2个点,并替换当前适应度最差的n/2个搜索代理;若未进入,则跳过;更新搜索代理位置模块:更新随机参数变量l、p,其中,在l用于控制螺旋形运动幅度,取值在[
‑
1,1]之间,p用于控制位置更新,在[0,1]之间;分别比较判断参数p、a的值,确定搜索代理的位置更新表达式,通过式(8)更新搜索代理的位置;更新迭代次数模块:更新迭代次数t;与最大迭代次数t
max
进行比较,若t≤t
max
,则回到更新当前适应度最优搜索代理模块进行操作;若t>t
max
,则结束搜索。
技术总结
本发明基于对数型收敛因子与聚合势能的鲸鱼优化系统及方法,方法按如下步骤:步骤1:初始化参数;步骤2:计算适应度值,选取适应度最差的n个点为初始化搜索代理;步骤3:根据具体问题模型确定当前各搜索代理的适应度值并比较,更新当前适应度最好的搜索代理为最优目标;步骤4:更新参数对数型收敛因子;步骤5:更新聚合势能、参数自适应权重;步骤6:根据聚合势能与当前最优适应度值判断算法是否陷入过早熟状态;步骤7:更新搜索代理的位置;步骤8:更新迭代次数t;与最大迭代次数T
技术研发人员:郑涛 滕旭阳 骆元昊 张旭光
受保护的技术使用者:杭州电子科技大学
技术研发日:2021.08.16
技术公布日:2021/12/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。