一种ur机器人双面自动印刷设备
技术领域
1.本实用新型涉及自动印刷设备技术领域,特别是一种ur机器人双面自动印刷设备。
背景技术:
2.目前,我公司生产的一款耳机产品,需要在两个不同方向的面上进行印刷,目前的生产是用两个不同的治具在两个印刷机上周转印刷,这样的生产方式有很多不足,例如产品需要在治具上来回拆装,治具需要来回周转、现场人员增加,这样不仅浪费了很多生产时间,还增加了很多人力成本和现场空间,而且效率也比较低。
3.为此我们研发了一种ur机器人双面自动印刷设备,用以解决以上问题。
技术实现要素:
4.本实用新型目的是为了克服现有技术的不足而提供一种ur机器人双面自动印刷设备,具有提高印刷精度,提高印刷效率,一次装夹两面印刷,保证翻转的定位精度,机器人操作顺畅等优点。
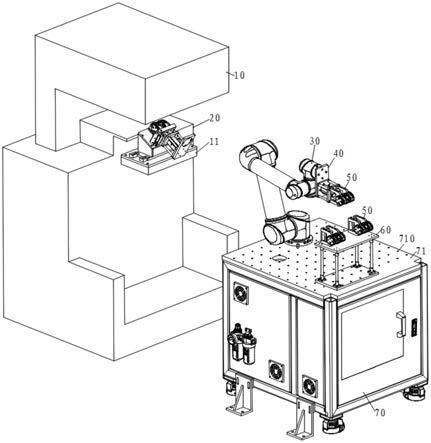
5.为达到上述目的,本实用新型采用的技术方案是:一种ur机器人双面自动印刷设备,包括一印刷机、一印刷定位治具、一ur机器人、一机械手治具、多个周转治具、一上料定位治具与一安装底座,所述安装底座设置在所述印刷机的一侧,所述印刷机设有一印刷安装板,所述印刷安装板的顶端处设有所述印刷定位治具,所述安装底座的顶端处设有所述上料定位治具与所述ur机器人,所述上料定位治具的顶端处设有所述周转治具,所述ur机器人设有所述机械手治具,所述ur机器人将所述周转治具与所述机械手治具压接定位,并将所述周转治具卡接的耳机产品转送至所述印刷定位治具上进行双面印刷。
6.优选的,所述周转治具包括一l形板,所述l形板包括一第一定位板与一第二定位板,所述第二定位板远离所述第一定位板的一端两侧处各设有一产品定位板,所述产品定位板的四周卡接有一耳机产品,所述第一定位板设有多个第一定位通孔。
7.优选的,所述第二定位板设有一矩形通孔,所述矩形通孔的顶端处依次设有一第一定位盲孔与一第二定位通孔,所述第二定位通孔的两侧各设有一所述第一定位盲孔。
8.优选的,所述产品定位板设有多个第三定位通孔与多个连接孔,所述第三定位通孔穿设有一第一定位销,所述第二定位板与所述产品定位板通过所述第一定位销与螺钉连接。
9.优选的,所述机械手治具包括一气缸支架,所述气缸支架的一端连接有一固定板,并且另一端通过第二定位销连接有所述第一定位板,所述气缸支架设有一旋转气缸,所述旋转气缸设有一旋转压头,所述旋转压头与所述第一定位板压接。
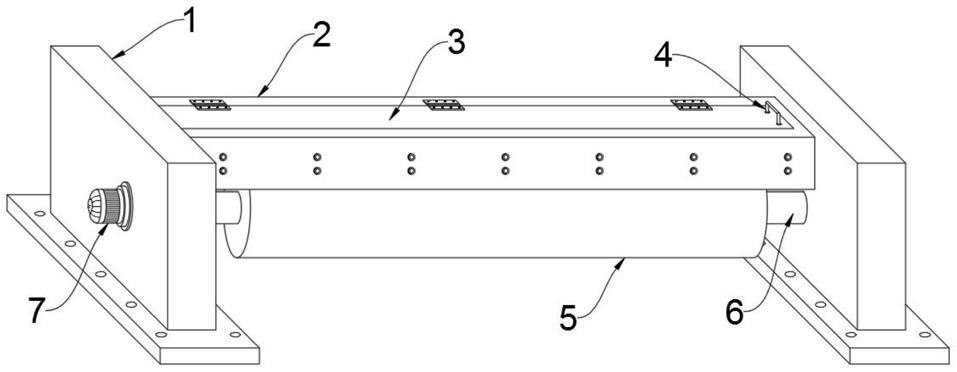
10.优选的,所述印刷定位治具包括一底板、一斜台、多个调节块与一压紧气缸,所述斜台设有一斜顶,所述斜顶的顶端处设有多个条形的凹槽、多个第三定位销与所述压紧气缸,所述压紧气缸的顶端处设有一压板,所述斜台与所述底板的顶端通过l形压块压接,所
述凹槽与所述调节块连接,所述凹槽的一端设有所述第三定位销,所述第三定位销设置在所述压板的下侧。
11.优选的,所述上料定位治具包括一下支撑板、一上支撑板、多个第四定位销与多个定位柱,所述下支撑板设有多个第一调节孔,所述下支撑板与所述上支撑板通过支架连接,所述第四定位销与所述定位柱设置在所述支撑板的顶端处,一所述定位柱设置在两个所述第四定位销的中间位置处。
12.优选的,所述安装底座的顶端处设有一顶板,所述顶板设有多个第二调节孔,所述第二调节孔分别与所述第一调节孔和所述ur机器人的底部固定连接。
13.由于上述技术方案的运用,本实用新型与现有技术相比具有下列优点:
14.1.采用机器人驱动的自动印刷,精度高,速度快;
15.2.治具采用分体设计,方便员工拆装,且一次装夹可完成两个面的印刷;
16.3.周转治具上三面设计了安装定位孔,无论怎样翻转,均能保证定位精度,从而保证印刷精度;
17.4.印刷机采用的伺服控制、治具的搬运采用机器人、各机构的配合逻辑均有机器人和plc来回通讯完成,逻辑连贯顺畅,报警率低。
附图说明
18.附图1为本实用新型所述ur机器人双面自动印刷设备的结构示意图;
19.附图2为本实用新型所述印刷定位治具的结构示意图;
20.附图3为本实用新型所述机械手治具的结构示意图;
21.附图4为本实用新型所述周转治具的结构示意图;
22.附图5为本实用新型所述上料定位治具的结构示意图。
具体实施方式
23.下面结合附图及具体实施例对本实用新型作进一步的详细说明。附图1至附图5中,一种ur机器人双面自动印刷设备,包括一伺服控制的印刷机10、一印刷定位治具20、一ur机器人30、一机械手治具40、多个周转治具50、一上料定位治具60与一安装底座70。印刷机10可根据需要与ur机器人30进行通讯印刷。ur机器人30是人机协作安全型机器人,负载5kg,精度
±
0.015mm,使用无需护栏。
24.安装底座70设置在印刷机10的一侧。印刷机10设有一印刷安装板11,印刷安装板11的顶端处设有印刷定位治具20。安装底座70的顶端处设有上料定位治具60与ur机器人30。上料定位治具60的顶端处设有周转治具50。ur机器人30设有机械手治具40,ur机器人30将周转治具50与机械手治具40压接定位,并将周转治具50卡接的耳机产品100转送至印刷定位治具20上进行双面印刷。安装底座70内部包含整个设备运转的自动控制部分,利用重量完成定位,表面均不安装孔,根据实际模拟空间进行ur机器人30的安装位置设定。
25.印刷定位治具20包括一底板21、一斜台22、多个调节块25与一压紧气缸24。斜台22设有一斜顶221,斜顶221的顶端处设有多个条形的凹槽222、多个第三定位销26与压紧气缸24。压紧气缸24的顶端处设有一压板241,斜台22与底板21的顶端通过l形压块压接。凹槽222与调节块25连接。凹槽222的一端设有第三定位销26,第三定位销26设置在压板241的下
侧。印刷定位治具20安装在印刷机10上,完成产品的印刷定位,主要由安装底板、定位销、调节块、旋转式压紧气缸组成,当机器人把周转治具放入本治具定位销上,压紧气缸会把治具牢牢的固定在本治具上,确保在印刷的过程中不会晃动。
26.机械手治具40包括一气缸支架43。气缸支架43的一端连接有一固定板41,并且另一端通过第二定位销431连接有第一定位板51。气缸支架43设有一旋转气缸42。旋转气缸42设有一旋转压头421,旋转压头421与第一定位板51压接。将周转治具50从上料定位治具60上取起放入印刷定位治具20上,上面有旋转气缸42,保证治具在ur机器人30上运行时不会脱落。
27.周转治具50包括一l形板,l形板包括一第一定位板51与一第二定位板53。第二定位板53远离第一定位板51的一端两侧处各设有一产品定位板52。产品定位板52的四周卡接有一耳机产品100。第一定位板51设有多个第一定位通孔511。周转治具50采用产品仿形加工定位,员工将产品装入本治具,然后将治具整体放入上料定位治具60进行定位,定位治具板上开有定位孔,分别与上料定位治具60、机械手治具40、印刷定位治具20定位使用。
28.第二定位板53设有一矩形通孔531。矩形通孔531的顶端处依次设有一第一定位盲孔535与一第二定位通孔533。第二定位通孔533的两侧各设有一第一定位盲孔535。
29.产品定位板52设有多个第三定位通孔521与多个连接孔522。第三定位通孔521穿设有一第一定位销55,第二定位板53与产品定位板52通过第一定位销55与螺钉连接。
30.上料定位治具60包括一下支撑板61、一上支撑板62、多个第四定位销621与多个定位柱622。下支撑板61设有多个第一调节孔610,下支撑板61与上支撑板62通过支架连接。第四定位销621与定位柱622设置在支撑板62的顶端处。一定位柱622设置在两个第四定位销621的中间位置处。上料定位治具60安装固定在安装底座70上,用于周转治具50上料的定位,上面设计有定位销,双工位上料。
31.安装底座70的顶端处设有一顶板71。顶板71设有多个第二调节孔710。第二调节孔710分别与第一调节孔610和ur机器人30的底部固定连接。
32.工作原理如下:
33.1、员工将产品装入周转治具50,然后将周转治具50装入上料定位治具60,并按下启动按钮。
34.2、ur机器人30获取信号后,通过机械手治具40将周转治具50取走放入印刷定位治具20。
35.3、印刷定位治具20将周转治具50固定好,机械手退出并发出启动印刷的信号。
36.4、印刷机10完成耳机产品100的一面印刷,并发信号给ur机械手。
37.5、机械手治具40翻转180
°
后并将周转治具50放入印刷定位治具20。
38.6、旋转气缸42压紧周转治具50,机械手退出,并发信号给印刷机10进行另一面印刷。
39.7、印刷完成后ur机械手将周转治具50取出,并返回至初始位置,将周转治具50放入上料定位治具60,同时将第二工位的产品取走进行印刷。
40.8、员工将印刷好的产品取下,并重新将待印刷的耳机产品装入周转治具50,装入上料定位治具60,等待下次印刷。
41.9、完成。
42.以上仅是本实用新型的具体应用范例,对本实用新型的保护范围不构成任何限制。凡采用等同变换或者等效替换而形成的技术方案,均落在本实用新型权利保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。