1.本实用新型涉及精密机械领域,特别涉及一种可带大负载的惯性冲击式压电驱动器。本实用新型解决了惯性冲击式压电驱动器尺寸与负载的矛盾,同时可实现低电压的大负载运动。本实用新型可以用于微/纳米机械测试、光学仪器、精密加工、集成电路封装、生物工程和航空航天技术等领域。
背景技术:
2.21世纪以来,航空航天、材料科学、生物工程、精密机械仪器等已经逐渐成为重点攻关的科技领域,随着这些技术的不断发展,机械领域也迎来了极复杂、巨大化、超精密化等极端方向的挑战。基于记忆合金、磁致伸缩、压电等物理效应,工业上出现了许多新型驱动器和驱动技术。在众多新型驱动器中,压电驱动器因其无磁场干扰、结构紧凑、定位精度高等诸多优点被认为是最有前途的一种。
3.以往的研究中,研究人员提出了基于不同工作原理的步进式压电驱动器,主要包括尺蠖型、超声波型、粘滑型和惯性冲击型。尺蠖型驱动器可以输出较大的力,但其结构较为复杂,制造和装配较为困难。超声波型驱动器可以轻松实现高速,但定位分辨率和精度相对较低。粘滑型驱动器结构相对简单,但其输出位移普遍存在回退运动。与其他类型驱动器相比,惯性冲击型驱动器结构简单、控制方便、且输出无回退,受到了广泛关注,但是其承载能力普遍较低;为了实现大的承载能力,需要大大增加驱动器的结构尺寸,所以往往难以实现结构尺寸与承载能力的兼容性。
4.为了提高惯性冲击式压电作动器的负载能力,同时在正反向一致性、移动速度和定位分辨率等方面获得较为稳定的输出性能,研制了一种旋转式可承载大负载的压电驱动器。在以往的设计中,通常将负载加到主质量块上,通过惯性质量块来带动主质量块和负载进行步进运动;在这种情况下驱动器的负载能力得不到充分的发挥。为了解决这个问题,本实用新型提出了一种方法,通过设计特殊的结构,将负载施加到惯性质量块上,使所带的负载跟随惯性质量块运动,可在保证驱动器整体尺寸小型化的前提下大幅提高承载能力。
技术实现要素:
5.本实用新型的目的在于提供一种可带大负载的惯性冲击式压电驱动器,解决了现有技术存在的上述问题。本实用新型通过特殊的结构设计,将负载质量转化为额外的惯性质量,有利于增大主质量块的步距角,可在低电压条件下带动较大的垂直负载,并且,驱动器具有较小的尺寸,进一步拓宽了其应用范围。控制方便简单,可以通过施加周期性锯齿驱动电压可以实现大范围的连续旋转运动。本实用新型为研制兼顾小尺寸和大负载的惯性驱动器提供了一种新的解决方案,在微/纳米机械测试、光学仪器、精密加工、集成电路封装、生物工程和航空航天技术等领域有广阔的应用前景。
6.本实用新型为实现上述目的采用的技术方案如下:
7.一种可带大负载的惯性冲击式压电驱动器,其特征在于:通过特殊机构的设计,将
惯性质量块设计成负载平台(惯性质量块),来大幅提高驱动器带负载能力。驱动器包括负载平台(惯性质量块)、压电叠堆、叶型柔性铰链、主质量块、预紧机构、滚动轴承和基座;所述的负载平台(惯性质量块)和主质量块与三个叶型柔性铰链通过螺钉并联排布成为执行机构;所述的预紧机构两侧各有一个通孔,通过螺钉与基座固连在一起;所述的滚动轴承的外圈与基座过通过渡配合相连接,并且通过螺钉固定,内圈与主质量块下端设计的圆柱凸台通过过盈配合相连接;所述的压电叠堆嵌入到放大机构内通过机构的预紧力固定,其在锯齿形电信号控制下,周期性地缓慢伸长和快速收缩,依据惯性冲击原理实现负载平台(惯性质量块)连续旋转运动。
8.所述连接负载平台(惯性质量块)与主质量块的三个叶型柔性铰链完全相同,并且均布与负载平台(惯性质量块)和主质量块相连,叶型柔性铰链与主质量块和负载平台(惯性质量块)存在一个角度;在压电叠堆得电伸长时,叶型柔性铰链被拉长,负载平台(惯性质量块)与主质量块发生旋转位移,基于惯性冲击的原理,产生连续的旋转位移。
9.本实用新型的有益效果在于:一种可带大负载的惯性冲击式压电驱动器能够有效地提高驱动器的带垂直负载的能力,实现低电压条件下带动很大的负载,显著提升了惯性冲击式压电驱动器的输出功率。同时保持了惯性冲击式压电驱动器体积小,结构简单,控制容易和分辨率高等优点,并且实现了最低3v的启动电压。
附图说明
10.此处所说明的附图用来提供对本实用新型的进一步理解,构成本技术的一部分,本实用新型的示意性实例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。
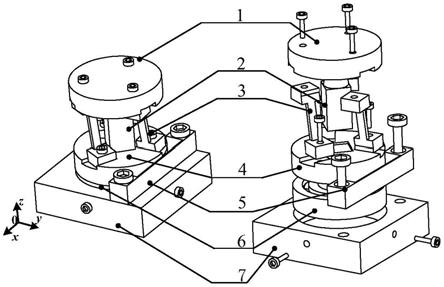
11.图1是本实用新型的结构示意图。
12.图2是本实用新型叶型柔性铰链的主视图和左视图示意图。
13.图3是本实用新型的工作过程示意图。
14.图4是实用新型在驱动电压u=20v,驱动频率f=10hz下测得的实际输出角速度与载荷之间关系的曲线。
15.图5是实用新型在驱动电压u=100v,驱动频率f=10hz下测得的实际输出角速度与载荷之间关系的曲线。
16.图中:1、负载平台(惯性质量块);2、压电叠堆;3、叶型柔性铰链;3.1、固定端ⅰ;3.2、柔性梁;3.3、固定端ⅱ;4、主质量块;5、滚动轴承;6、预紧机构;7、基座。
具体实施方式
17.下面将结合附图进一步说明本实用新型的详细内容及其具体实施方式。
18.参见图1至图5所示,本实用新型提出一种可带大负载的惯性冲击式压电驱动器,设计了一种新型的驱动器,提高了惯性冲击式压电驱动器的带垂直负载的能力,对于实现驱动器的大负载应用具有重要意义。
19.所述的一种可带大负载的惯性冲击式压电驱动器,其特征在于:驱动器包括负载平台(惯性质量块)(1)、压电叠堆(2)、叶型柔性铰链(3)、主质量块(4)、预紧机构(5)、滚动轴承(6)和基座(7)。传统上的惯性冲击式驱动器通常将负载平台固定到主质量块上,本实
用新型通过放大机构的特殊设计,将负载平台与惯性质量块实现了固连,有效的提高了驱动器的带负载能力,同时保持了惯性冲击式压电驱动器体积小,结构简单,控制容易和分辨率高等优点,并且实现了最低3v的启动电压,拓宽了其在微/纳米机械测试、光学仪器、精密加工、集成电路封装、生物工程和航空航天技术等领域的应用范围。
20.参见图1、图2所示,本实用新型的一种可带大负载的惯性冲击式压电驱动器包括负载平台(惯性质量块)(1)、压电叠堆(2)、叶型柔性铰链(3)、主质量块(4)、预紧机构(5)、滚动轴承(6)和基座(7);所述的负载平台(惯性质量块)(1)和主质量块(4)与三个叶型柔性铰链(3)通过螺钉并联排布成为放大机构;所述的预紧机构(5)两侧各有一个通孔,通过螺钉与基座(7)固连在一起;所述的滚动轴承(6)的外圈与基座(7)通过过渡配合相连接,并且通过螺钉固定,内圈与主质量块(4)下端设计的圆柱凸台通过过盈配合相连接;所述的压电叠堆(2)嵌入到执行机构内通过机构的预紧力固定,其在锯齿形电信号控制下,周期性地缓慢伸长和快速收缩,依据惯性冲击原理实现负载平台(惯性质量块)(1)连续旋转运动。
21.所述的连接负载平台(惯性质量块)(1)与主质量块(4)的三个叶型柔性铰链(3)完全相同,并且均布与负载平台(惯性质量块)(1)和主质量块(4)相连,叶型柔性铰链(3)与主质量块(4)和负载平台(惯性质量块)(1)存在一个角度;在压电叠堆(2)得电伸长时,叶型柔性铰链(3)被拉长,负载平台(惯性质量块)(1)与主质量块(4)发生旋转位移,基于惯性冲击的原理,产生连续的旋转位移。
22.参见图3所示,本实用新型的一种可带大负载的惯性冲击式压电驱动器的工作过程,包括以下步骤:
23.①
t0时刻通过螺钉将负载平台(惯性质量块)(1)、主质量块(4)和叶型柔性铰链(3)连接组成放大机构,将压电叠堆(2)以紧配合的方式内嵌入放大机构中,工作前,通过调整预紧机构(5)上的预紧螺钉与主质量块(4)的接触力实现摩擦力的调整;
24.②
向压电叠堆(2)输入的电压信号幅值缓慢增大,基于逆压电效应,压电叠堆(2)逐渐伸长,叶型柔性铰链(3)受到拉伸作用,产生弯曲变形,使得惯性质量块(1)顺时针旋转运动;
25.③
在t1‑
t2阶段,电压幅值急剧减小至0v,压电叠堆(2)迅速收缩,叶型柔性铰链(3)恢复到初始状态,此时惯性质量块(1)产生顺时针方向的惯性冲击力,使主质量块(4)沿顺时针方向转动,产生位移s;
26.④
重复以上步骤即可实现稳定的步进运动,调节压电叠堆(2)输入电信号的幅值与频率,可实现驱动器运动方向、速度等的调节。
27.参见图4
‑
5所示,为本实用新型的一种可带大负载的惯性冲击式压电驱动器分别为在驱动电压u=20v,驱动频率f=10hz和在驱动电压u=100v,驱动频率f=10hz下测得的实际输出角速度与载荷之间关系的曲线。可以看出,在驱动电压u=20v,驱动频率f=10hz时驱动器的运动速度出现先升高再下降的趋势。经过分析,出现下降趋势可能是由于垂直负载增加的摩擦力限制了驱动器的运动;在驱动电压u=100v,驱动频率f=10hz所加的垂直载荷测量到67n,考虑到继续增加载荷可能会对驱动器造成损伤,质量块倾翻砸坏工作台等诸多因素,没有再增加负载。在驱动电压u=100v,驱动频率f=10hz可带动的最大负载超过67n。
28.以上所述仅为本实用新型的优选实例而已,并不用于限制本实用新型,对于本领
域的技术人员来说,本实用新型可以有各种更改和变化。凡对本实用新型所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。