1.本发明属于清洁机器人领域,尤其是基于视觉导航的无人拖地清洁车领域。
背景技术:
2.随着城市的不断发展,很多城市在不断的建设多条相互交织的地下轨道交通,而每条轨道交通的线路上会设置很多个地铁站的站点,每个地铁站点至少有一个地铁厅;为了保持地铁厅内的卫生,每个地铁站点都配备了数量不一的保洁人员,在人力成本日益增高的条件下,每个城市的地铁用于维护卫生的成本过高,而且目前雇佣的保洁人员多为中年人,长时间的工作容易造成效率低下,而且还经常出现由于身体不适造成停工的情况;为此,为了解决人工的问题,市场上已经开始用扫地机器人来替代人工进行清洁工作;但是目前市场上的扫地机器人功能、结构比较复杂,而且大多采用激光导航、超声波导航等技术的扫地机器人,成本十分昂贵,动辄几万元的采购成本,及其高昂的后期维护费用让人望而却步。
技术实现要素:
3.为了解决上述清扫机器人使用成本过高的问题,本发明通过以下技术方案来实现上述目的:
4.一种基于视觉导航的无人拖地清洁车及控制方法和基站,包括底座、设于底座上方的顶板,所述底座上设有行走轮,所述底座沿着前进和后退方向的一侧分别设有机架,所述机架上部设有电动推杆,所述电动推杆的底部耦合连接拖把;所述顶板上沿着四个不同的方向分别设有摄像头,其中两个摄像头沿着清洁车前进后退的方向进行布置。
5.作为本发明的进一步优化方案,所述行走轮采用麦克纳姆轮,所述底座上靠近行走轮处分别设有驱动电机,所述驱动电机带动行走轮转动。
6.作为本发明的进一步优化方案,所述机架的外侧设有u形盖板,所述u形盖板与机架之间形成腔体,腔体远离机架的侧壁上设有若干第一通孔;所述电动推杆与拖把之间设有滑块,滑块嵌设于腔体中,所述滑块上设有若干第二通孔;所述机架内设有电磁推杆,所述电磁推杆穿过机架的侧壁后同时穿入第一通孔和第二通孔,进而对滑块进行限位固定。
7.一种基于视觉导航的无人拖地清洁车的基站,所述基站包括清洗水槽、紧邻清洗水槽设置的斜坡,所述拖把在电动推杆的作用下在清洗水槽内进行上下运动。
8.作为本发明的进一步优化方案,所述斜坡中设有充电装置,所述充电装置用于清洗车充电。
9.一种基于视觉导航的无人拖地清洁车的控制方法,包括以下步骤;
10.步骤s1、获取目标清洗区域的平面图,
11.步骤s2、结合地面方砖的铺设样式对平面图进行栅格化处理,得到格栅地图;
12.步骤s3、构建标记模块,并结合格栅地图制定运动路径;
13.步骤s4、清洗车按照制定的运动路径遍历清洗区域,并通过摄像头实时采集行走
方向上的标记模块的信息确定并修正清洗车的实际位置
14.作为本发明的进一步优化方案,所述标记模型包括自然标记和人为标记,所述自然标记至少包括相邻方砖的地缝和设于墙壁上的exit标记;所述人为标记设置于清洗区域内的特定位置处,用于定位清洗车位置并触发清洗车的特定预设动作。
15.作为本发明的进一步优化方案,所述步骤s3中的运动路径中将相邻方砖的地缝作为清洗车行走的标识线。
16.作为本发明的进一步优化方案,所述步骤s4中洗车按照制定的运动路径遍历清洗区域时,若运动路径上设有障碍物时,清洗车按照预设避障动作进行避障绕行,然后恢复至原运动路线继续进行清洗;所述障碍物为临时出现的人或物体。
17.本发明的有益效果在于:
18.1)本发明通过极简的设计,去除功能繁多的结构,保留最核心的结构,这样一方面可以极大的降低清洁车的制造成本,另一方面极简的结构可以大大降低设备出现故障的概率,提升使用可靠性。
附图说明
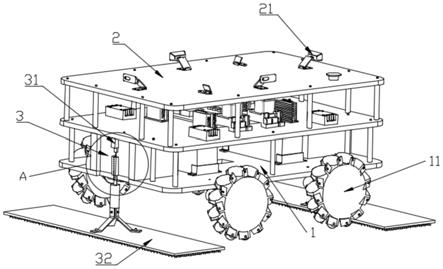
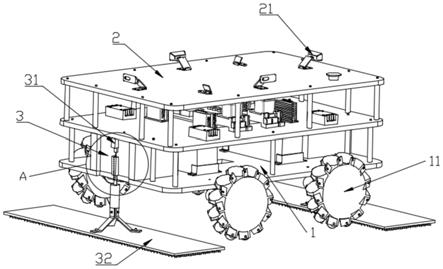
19.图1是本发明的清洁车的结构示意图;
20.图2是本发明图1中a处的局部放大示意图;
21.图3是本发明的清洁车的底部示意图;
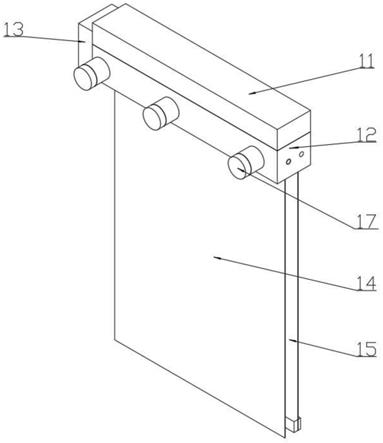
22.图4是本发明的机架示意图;
23.图5是本发明的基站的示意图;
24.图6是本发明的清洁车的路径规划示意图;
25.图中:1、底座;11、行走轮;12、驱动电机;2、顶板;21、摄像头;3、机架;31、电动推杆;32、拖把;33、滑块;331、第二通孔;4、u型盖板;411、第一通孔;5、电磁推杆;6、基站;61、清洗水槽;62、斜坡;63、充电装置。
具体实施方式
26.下面结合附图对本技术作进一步详细描述,有必要在此指出的是,以下具体实施方式只用于对本技术进行进一步的说明,不能理解为对本技术保护范围的限制,该领域的技术人员可以根据上述申请内容对本技术作出一些非本质的改进和调整。
27.如图1至图6所示的一种基于视觉导航的无人拖地清洁车,包括清洁车主体,该清洁车主体整体分成三层,从下至上依次为底座1、中间板和顶板2,其中,底座1的上设有四个行走轮11,为了便于移动,该行走轮采用麦克纳姆轮,同时在底座1的底面靠近行走轮11处分别设有四个驱动电机12,驱动电机的输出轴与行走轮11的输入端连接,从而使得每个驱动电机12带动行走轮11转动;
28.底座1的上面设有两个电池包,并且将电池包分别对称设于清洁车的前后两端,从而保持清洁车前后重量分布的平衡;
29.中间板设于底座1和顶板2之间,中间板上设有控制主板、四个驱动器、两个继电器;驱动器的输入端与控制主板的输出端连接,用于接收在控制主板的信号,然后将信号进行处理后转移至驱动电机,进而控制行走轮的运动;
30.顶板2上设有四个摄像头21,摄像头21用于采集清洁车行进路线上的视觉图像;四个摄像头分别设立于顶板的前后左右四个方向上;此外在顶板上还设有用于紧急使用的急停开关;
31.同时,在底座11的前后端分别设有机架3,机架3上设有电动推杆31,电动推杆31的底部设有铰接设有滑块33,滑块的底部耦合连接拖把32,并且在机架3的外侧设有u形盖板4,u形盖板4与机架之间形成腔体,腔体远离机架的侧壁上设有若干第一通孔411,滑块33嵌设于腔体中,滑块33上设有若干第二通孔331;机架33内还水平设有电磁推杆5,使用时,将电磁推杆5穿过机架33的侧壁后同时穿入第一通孔411和第二通孔331,进而对滑块33进行限位固定,进而固定拖把的高度位置;清洁车在进行清洗时,前后设置的拖把可以轮回单一使用,实现单程长距离清洁,减少清洗车回基站的次数;前后拖把还可以同时使用,便于提升单次行程的清洁洁净程度。
32.一种基于视觉导航的无人拖地清洁车的基站,该基站6用于匹配上述的无人拖地清洁车使用,其中,基站6包括清洗水槽61、紧邻清洗水槽61设置的斜坡62,使用时,清洁车自行通过斜坡驶上斜坡上,然后将电磁推杆缩回,此时滑块33可以在腔体内来回滑动,进而在电动推杆31的作用下带动拖把32在清洗水槽61内进行上下运动,从而去除拖把上的脏污;便于下一循环的清洁使用;同时,在斜坡62中设有给清洁车充电的充电装置63,优选的,该充电装置63采用无线充电装置,用于给清洁车进行无线充电;同理,在清洁车的底板上还需要安装无线充电接收装置。
33.一种基于视觉导航的无人拖地清洁车的控制方法,包括以下步骤;
34.步骤s1、获取目标清洗区域的平面图,
35.步骤s2、结合地面方砖的铺设样式对平面图进行栅格化处理,得到格栅地图;
36.步骤s3、构建标记模块,并结合格栅地图制定运动路径;
37.步骤s4、清洗车按照制定的运动路径遍历清洗区域,并通过摄像头实时采集行走方向上的标记模块的信息确定并修正清洗车的实际位置。
38.导航是对清洁机器人所要求的最具挑战性的能力之一,如何获取环境信息,实现对自身及目标、障碍物的定位,并通过规划方法得到无障碍导航路径,是需要解决的问题;目前由于环境的复杂性,完全靠机器人进行自主随机清洁的容易出现各种问题,尤其是机器人在多次进行障碍规避后出现混乱的情况,例如重复清洁、遗漏清洁;因此,本技术采用了路径规划式的导航方式,针对不同的清洁环境预先设定好清洁车的运动路径,在清洁车的行走路线上没有出现临时的障碍物时,清洁车会一直按照预设的运动路线遍历整个清洁区域,从而可以有效的避开随机的碰撞式清洁方式,大大提高清洁车的清洁效率和可靠性;
39.具体的以附图6的地铁站地面清洁示意图为例进行详细说明;
40.先获取目标清洗区域的平面图,即某地铁站的某层地面的待清洁区域,该平面图上不仅包括待清洁区域的边界,同时该区域内还标记出地铁站内立柱、上下层出入口、售票机、售货机的位置和尺寸,便于进行后面进行设计规划路线;
41.路径规划式的导航中,通常会利用设置标识线条来进行规划设备的行走路线,这种方式在工厂中比较常见,但是在地铁站内设置密集的标识线明显不太现实,为了解决该问题,本技术中利用地铁站中已有的标记作为自然标记,然后在需要额外布置路标的位置处设置人为标记;该自然标记和人为标记共同组合为标记模块,通过该标记模块起到清洗
车的引导作用和定位作用;具体的,本技术中的自然标记至少包括相邻方砖的地缝和设于墙壁上的exit标记,这里需要注意的是凡是地铁站中已有的并且具有显著特性的物体均可以作为自然标记,从而减少人为标记对现有环境的干扰;附图6中的立柱和售货机等也可以作为自然标记;
42.其中,一般情况下地铁站的方砖铺设都是采用正贴的方式(若有斜贴的方式不在申请的考虑范围内),因此相邻方砖的地缝也是一条笔直的长线,从而利用该地缝的连线代替现有技术中的标识线,实现对清洗车的路线导航,确保清洁车按照预设定的路径行走;
43.当清洁车行走至特殊的位置区域时,可能会出现特殊的行走路径路线,此时需要设立人为标记辅助清洁车进行定位位置并触发特定预设动作,例如后面上下出入口处的上下两侧的区域遍历清洁;
44.此外,在清洁车在遍历清洁的过程中,地铁站力人来人往,环境比较繁杂,因此,在清洁车按照制定的运动路径遍历清洗区域时,若运动路径上设有障碍物时,清洗车按照预设避障动作进行避障绕行,然后恢复至原运动路线继续进行清洗;这里的障碍物指的是临时出现的人或物体;
45.具体的,一旦清洁车监测到前方的障碍物为人,则清洗车会逐渐停下,并发出语音提示行人让路,若监测到前方的障碍物为静止的物体时,控制清洗车进行绕行,并随之恢复至原活动路径上继续行驶;由于这部分关于障碍物的识别和规避方式整体与现有技术中的方法一致,因此这里不再进行赘述;
46.为了便于进一步的理解上述的内容,下面结合附图的清洗环境进行路径的具体描述;本技术中采用的路径描述文件每行是一个三元组:(动作字符,动作参数,视觉标记图像(可缺省))
47.其中,动作字符分别是:f,b,r,l;分别表示:f向前直行,b向后直行,r向右转向,l向左转向;
48.动作参数分别表示:行驶时间(秒),对于动作字符f,b;而动作字符r,l,动作参数表示为转向角度。
49.视觉标记图像则表示:视觉标记图像(对象,如“exit”标记),则停止当前动作,如一直走到遇到“exit”则停止前进;
50.路径描述如下:
51.s1:f,100,noline;//前行100秒,直到看不到地缝,停车
52.s2:r,1;//右移1个单位,可以右移0.5个单位
53.s3:b,100,noline;//后退100秒,直到看不见地缝
54.s4:l,1;//左移1个单位,
55.s5:f,100,noline;//前行100秒,直到看不到地缝,停车
56.s6:r,1;//右移1个单位,
57.s7:b,100,noline;//后退100秒,直到看不见地缝
58.s8:l,1;//左移1个单位,
59.s9:f,30,corner;//前行100秒,直到看到转角,
60.s10:r,1;//右移1个单位,
61.s11:b,30,noline;//后退100秒,直到看不见地缝
62.s12:f,90,noline;//前行100秒,直到看不到地缝,停车;
63.依次类推,包括清洁车在清洁四个立柱区域的路径描述也与上述原理相同,遇到第一列的立柱时,清洁车左移一个单位,然后前进若干单位后右移一个单位,继续前进100秒,直到看不见接缝停车,左移,如此循环,直到看不见地缝,随后左移并后退;
64.整个路径区域内与上述的路径描述的方法不同的是在清洁车运动至楼层出入口处的上方区域时(附图方位中的北边),清洁车的路径描述为:直行30,到头;左移,后退30,到头......直到清洁车将整个出入口上方区域遍历一遍后,直行若干秒,直到看见转角,然后右移x单位,x单位与出入口的长度相匹配,然后进行出入口下方区域的遍历,直到该区域遍历完成。
65.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制,应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。