技术特征:
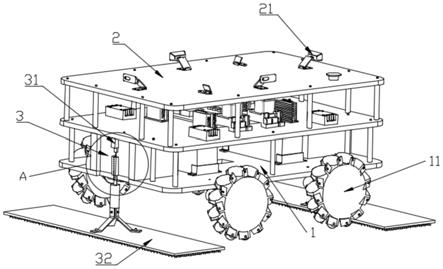
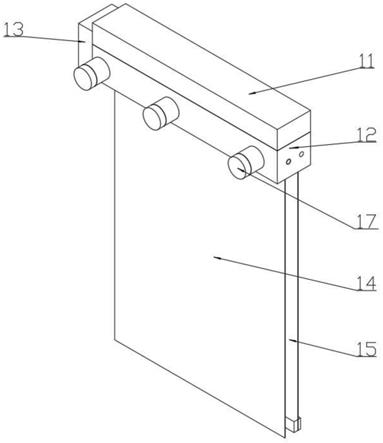
1.一种基于视觉导航的无人拖地清洁车,其特征在于:包括底座(1)、设于底座(1)上方的顶板(2),所述底座(1)上设有行走轮(11),所述底座(11)沿着前进和后退方向的一侧分别设有机架(3),所述机架(3)上部设有电动推杆(31),所述电动推杆(31)的底部耦合连接拖把(32);所述顶板(2)上沿着四个不同的方向分别设有摄像头(21),其中两个摄像头(21)分别沿着清洁车前后方向进行布置。2.根据权利要求1所述的一种基于视觉导航的无人拖地清洁车,其特征在于:所述行走轮(11)采用麦克纳姆轮,所述底座(1)上靠近行走轮(11)处分别设有驱动电机(12),所述驱动电机(12)带动行走轮(11)转动。3.根据权利要求2所述的一种基于视觉导航的无人拖地清洁车,其特征在于:所述机架(3)的外侧设有u形盖板(4),所述u形盖板(4)与机架之间形成腔体,腔体远离机架的侧壁上设有若干第一通孔(411);所述电动推杆(31)与拖把(32)之间设有滑块(33),滑块(33)嵌设于腔体中,所述滑块(33)上设有若干第二通孔(331);所述机架(33)内水平设有电磁推杆(5),所述电磁推杆(5)穿过机架(33)的侧壁后同时穿入第一通孔(411)和第二通孔(331),进而对滑块(33)进行限位固定。4.一种基于视觉导航的无人拖地清洁车的基站,其特征在于:所述基站(6)用于匹配如权利要求4所述的无人拖地清洁车使用,所述基站(6)包括清洗水槽(61)、紧邻清洗水槽(61)设置的斜坡(62),所述拖把(32)在电动推杆(31)的作用下在清洗水槽(61)内进行上下运动。5.根据权利要求4所述的一种基于视觉导航的无人拖地清洁车的基站,其特征在于:所述斜坡(62)中设有充电装置(63),所述充电装置(63)用于清洗车充电。6.一种如权利要求1至3任一所述的基于视觉导航的无人拖地清洁车的控制方法,其特征在于:包括以下步骤;步骤s1、获取目标清洗区域的平面图,步骤s2、结合地面方砖的铺设样式对平面图进行栅格化处理,得到格栅地图;步骤s3、构建标记模块,并结合格栅地图制定运动路径;步骤s4、清洗车按照制定的运动路径遍历清洗区域,并通过摄像头实时采集行走方向上的标记模块的信息确定并修正清洗车的实际位置。7.根据权利要求6所述的一种基于视觉导航的无人拖地清洁车的控制方法,其特征在于:所述标记模型包括自然标记和人为标记,所述自然标记至少包括相邻方砖的地缝和设于墙壁上的exit标记;所述人为标记设置于清洗区域内的特定位置处,用于定位清洗车位置并触发清洗车的特定预设动作。8.根据权利要求7所述的一种基于视觉导航的无人拖地清洁车的控制方法,其特征在于:所述步骤s3中的运动路径中将相邻方砖的地缝作为清洗车行走的标识线。9.根据权利要求8所述的一种基于视觉导航的无人拖地清洁车的控制方法,其特征在于:所述步骤s4中洗车按照制定的运动路径遍历清洗区域时,若运动路径上设有障碍物时,清洗车按照预设避障动作进行避障绕行,然后恢复至原运动路线继续进行清洗;所述障碍物为临时出现的人或物体。
技术总结
本发明涉及一种基于视觉导航的无人拖地清洁车及控制方法和基站,包括底座、设于底座上方的顶板,所述底座上设有行走轮,所述底座沿着前进和后退方向的一侧分别设有机架,所述机架上部设有电动推杆,所述电动推杆的底部耦合连接拖把;所述顶板上沿着四个不同的方向分别设有摄像头;本发明通过极简的设计,去除功能繁多的结构,保留最核心的结构,这样一方面可以极大的降低清洁车的制造成本,另一方面极简的结构可以大大降低设备出现故障的概率,提升使用可靠性。升使用可靠性。升使用可靠性。
技术研发人员:朱明
受保护的技术使用者:朱明
技术研发日:2021.08.11
技术公布日:2021/11/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。