1.本技术涉及海底作业设备技术领域,尤其涉及一种海底采矿机器人。
背景技术:
2.海底不但富含镍、铜、钴、锌等金属矿产,还具有较多的砂矿、磷灰石及多金属结核等物质,这些是制造新能源电池、智能手机等高端产品的关键。
3.然而,海底金属矿产资源的开发才刚刚起步,还停留在海底表层矿产资源的开发阶段,开采方式还是以挖掘海底的松软岩体为主。
技术实现要素:
4.本技术提供一种海底采矿机器人,可以对海底的多种矿石进行采集。
5.具体的,一种海底采矿机器人,包括:机体,具有容纳腔;履带式移动机构,安装于所述机体的两侧上,使得所述机体具有移动功能;碎矿器,所述碎矿器包括碎矿头组件以及第一驱动机构,所述第一驱动机构与所述碎矿头组件连接,并用于驱动所述碎矿头组件沿竖向移动;过滤收集机构,位于所述机体的侧方,且与所述机体连接,所述过滤收集机构用于收集破碎的矿石;滚轮式粉碎器,安装于所述容纳腔内;输运机构,与所述过滤收集机构以及所述机体连接,用于将所述集料斜板上的矿石输运至所述滚轮式粉碎器中;齿盘式粉碎器,所述齿盘式粉碎器具有进料口以及排料口,所述齿盘式粉碎器的进料口位于所述滚轮式粉碎器的出料口的下方;矿石容器,位于所述机体的顶部,所述矿石容器上安装有浮力袋以及充气机构,所述充气机构用于向所述浮力袋充气;吸料器,具有吸料口,所述吸料器的吸料口与所述齿盘式粉碎器的排料口连通,用于将所述齿盘式粉碎器的排料口排出的矿石吸取至矿石容器中。
6.本技术的有益效果为:海底采矿机器人上集成有矿石破碎、收集、过滤、粉碎以及采集等功能,并且具有两级粉碎,可以对各种矿石进行充分的粉碎,相比于链斗式采矿装置,可以对海底各种类型的矿石进行采集,并且可有效改善矿石开采和筛选的效率以及质量,同时,通过充气的形式增大矿石容器的浮力,可以降低矿石打捞功耗。
附图说明
7.为了更清楚地说明本技术实施例或相关技术中的技术方案,下面将对实施例或相关技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据
这些附图获得其他的附图。
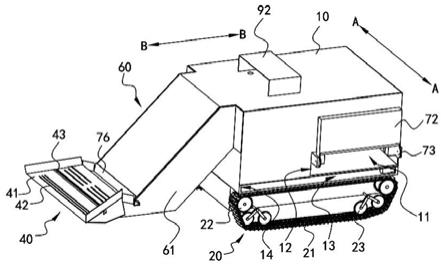
8.图1为本技术一实施例中海底采矿机器人的整体结构示意图;图2为本技术一实施例中海底采矿机器人的部分结构示意图;图3为本技术一实施例中碎矿器的结构示意图;图4为本技术一实施例中海底采矿机器人的部分结构示意图;图5为本技术一实施例中扫矿组件的结构示意图;图6为本技术一实施例中过滤收集机构以及输运机构的部分结构示意图。
9.附图标记:10、机体;11、容纳腔;12、第二开口;13、容纳槽;14、第三开口;20、履带式移动机构;21、履带;22、驱动链轮;23、调节链轮;30、碎矿器;31、碎矿头组件;311、铣刀头;321、液压粉碎头;32、第一驱动机构;33、壳体;331、收容腔;332、第一开口;40、过滤收集机构;41、集料斜板;42、过滤孔;43、输料滚轮;51、滚轮式粉碎器;52、齿盘式粉碎器;60、输运机构;61、机架;62、第一转动齿轮;63、输送链;64、矿石输送组件;641、第一板体;642、第二板体;65、第一滑道;66、第二滑道;71、第二驱动机构;72、铲斗;73、安装块;74、第三驱动机构;75、安装轴;76、转接板;77、第六驱动机构;80、扫矿组件;81、转动杆;82、扫矿杆;83、第三铰轴;91、吸料器;92、封包装置。
具体实施方式
10.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
11.海底不但富含镍、铜、钴、锌等金属矿产,还具有较多的砂矿、磷灰石及多金属结核等物质,这些是制造新能源电池、智能手机等高端产品的关键。
12.然而,海底金属矿产资源的开发才刚刚起步,还停留在海底表层矿产资源的开发阶段,开采方式还是以挖掘海底的松软岩体为主。
13.本技术提供一种海底采矿机器人,以解决相关技术中海底矿产开采方式还是以挖掘海底的松软岩体为主的问题。
14.具体的,如图1和图2所示,海底采矿机器人包括机体10、履带式移动机构20、碎矿器30、过滤收集机构40、滚轮式粉碎器51、输运机构60、齿盘式粉碎器52、矿石容器以及吸料器91。
15.其中,机体10具有容纳腔11,机体10可以由抗腐蚀金属,如碳素钢或低合金高强度钢等制成,机体10可以为一体成型结构,以提升机体10整体的结构强度,当然,机体10也可以由多块结构拼接而成。
16.履带式移动机构20安装于所述机体10的两侧上,使得所述机体10具有移动功能,从而使得海底采矿机器在海底可以移动采矿,而履带式移动机构20可以适应凹凸不平的路面,从而使得海底采矿机器人可以适应复杂的海底环境。
17.碎矿器30包括碎矿头组件31以及第一驱动机构32,所述第一驱动机构32与所述碎矿头组件31连接,并用于驱动所述碎矿头组件31沿竖向移动;可以理解的是,利用第一驱动机构32驱动碎矿头组件31竖向移动,使得碎矿头组件31可以与海底矿石接触,从而使得碎
矿头组件31可以对海底坚硬的矿石进行破碎。第一驱动机构32可以为液压缸,利用第一驱动机构32的伸缩杆与碎矿头组件31固定连接,使得第一驱动机构32可以驱动碎矿头组件31沿竖向移动。
18.过滤收集机构40位于所述机体10的侧方,且与所述机体10连接,所述过滤收集机构40用于收集破碎的矿石。
19.滚轮式粉碎器51安装于所述容纳腔11内,滚轮式粉碎器51是采用滚轮碾压的方式对过滤收集机构40收集的矿石进行粉碎,滚轮式粉碎器51的具体工作原理在相关技术中早有公示,本技术不做赘叙。
20.输运机构60与所述过滤收集机构40以及所述机体10连接,用于将所述集料斜板41上的矿石输运至所述滚轮式粉碎器51中。输运机构60可以为带式输送机构、板式输送机构、刮板输送机构、埋刮板输送机构、斗式输送机构或悬挂输送机构等输运机构。
21.齿盘式粉碎器52具有进料口以及排料口,所述齿盘式粉碎器52的进料口位于所述滚轮式粉碎器51的出料口的下方,齿盘式粉碎器52是采用齿盘碾磨的方式对经滚轮式粉碎器51粉碎后的矿石进行再次粉碎,齿盘式粉碎器52的具体工作原理在相关技术中早有公示,本技术不做赘叙。
22.矿石容器位于所述机体10的顶部,所述矿石容器上安装有浮力袋以及充气机构,所述充气机构用于向所述浮力袋充气。矿石容器可以为袋式容器或箱体式容器,浮力袋可以固定于矿石容器上,矿石容器中未装载矿石时,浮力袋处于干瘪状态,此时浮力袋的浮力较小,待矿石容器中装载有足够的矿石后,充气机构向浮力袋充气,此时浮力袋处于爆满状态,具有极大的浮力,从而可以将矿石容器浮起。
23.吸料器91具有吸料口,所述吸料器91的吸料口与所述齿盘式粉碎器52的排料口连通,用于将所述齿盘式粉碎器52的排料口排出的矿石吸取至矿石容器中。吸料器91可以为吸送式吸料器、压送式吸料器或混合式吸料器。
24.需要说明的是,在本技术中,使用海底采矿机器人在海底进行采矿作业时,海底采矿机器人通过履带式移动机构20移动至合适的采矿点后,第一驱动机构32驱动碎矿头组件31下移至与矿石接触,并利用碎矿头组件31对矿石进行粉碎,粉碎后的矿石通过过滤收集机构40进行收集和过滤,以去除矿石中细碎的颗粒和土壤,经过过滤收集机构40处理后的矿石通过输运机构60输运至滚轮式粉碎器51中,同时利用滚轮式粉碎器51对矿石进行一级粉碎,经过滚轮式粉碎器51粉碎后的矿石排入至齿盘式粉碎器52中,并通过齿盘式粉碎器52对矿石进行二级粉碎,从而可以将矿石充分粉碎,随后,吸料器91将充分粉碎的矿石吸取至矿石容器中,待矿石容器中装载有足够的矿石后,充气机构向浮力袋充气,并更换矿石容器,利用浮力袋的浮力将矿石容器浮出海面,此时可以利用在海面上的船对矿石容器进行收集。
25.可以理解的是,在本技术中,海底采矿机器人上集成有矿石破碎、收集、过滤、粉碎以及采集等功能,并且具有两级粉碎,可以对各种矿石进行充分的粉碎,相比于链斗式采矿装置,可以对海底各种类型的矿石进行采集,并且可有效改善矿石开采和筛选的效率以及质量,同时,通过充气的形式增大矿石容器的浮力,可以降低矿石打捞功耗。
26.继续参见图1所示,在本技术一实施例中,所述履带式移动机构20包括履带21、驱动链轮22以及调节链轮23,驱动链轮22为齿轮,通过驱动链轮22与履带21的啮合,驱动链轮
22转动时带动履带21移动,从而使得海底采矿机器人移动;调节链轮23与履带21抵接,可以减少履带21下部着地时压强的不均匀性,履带式移动机构20的具体工作原理在相关技术中早有公示,本技术不做赘叙。
27.具体的,如图2和图3所示,所述碎矿器30还包括壳体33,所述第一驱动机构32安装于所述壳体33上。
28.其中,所述壳体33上设置有用于容纳所述碎矿头组件31以及第一驱动机构32的收容腔331,所述壳体33的底部设置有供所述碎矿头组件31出入所述收容腔331的第一开口332。
29.可以理解的是,运输海底采矿机器人以及海底采矿机器人在海底行走的过程中,可以将碎矿头组件31收容于收容腔331中,从而可以减小碎矿器30整体所占用的空间,使得海底采矿机器人的整体结构更加紧凑,从而可以减小海底采矿机器人的造价,便于海底采矿机器人的维护和维修,从而可以显著提高海底采矿的收益。
30.进一步的,继续参见图2和图3所示,所述碎矿器30可以收容于所述容纳腔11内,所述机体10的侧壁上开设有供所述碎矿器30出入所述容纳腔11的第二开口12。
31.其中,所述海底采矿机器人还包括第二驱动机构71,第二驱动机构71安装于所述机体10上,且与所述壳体33连接,所述第二驱动机构71用于驱动所述碎矿器30沿第一预设方向aa水平移动,以通过所述第二开口12出入所述容纳腔11。
32.可以理解的是,运输海底采矿机器人以及海底采矿机器人在海底行走的过程中,可以将碎矿器30整体收容于容纳腔11中,从而可以减小海底采矿机器人的整体体积,使得海底采矿机器人的整体结构更加紧凑,需要使用碎矿器30时,通过第二驱动机构71驱动碎矿器30沿第一预设方向aa移动,使得碎矿器30通过第二开口12移出容纳腔11后,通过第一驱动机构32驱动碎矿头组件31下移,即可利用碎矿头组件31对海底矿石进行破碎。第二驱动机构71也可以为液压缸,利用第二驱动机构71的伸缩杆与壳体33固定连接,使得第二驱动机构71可以驱动碎矿器30沿第一预设方向aa移动。
33.继续参见图2和图3所示,碎矿头组件31以及第一驱动机构32还可以沿第二预设方向bb水平移动,可以通过液压缸驱动碎矿头组件31以及第一驱动机构32沿第二预设方向bb水平移动,第二预设方向bb与第一预设方向aa垂直,使得无需海底采矿机器人整体移动即可对一定范围内的矿石进行破碎,以提升工作效率。
34.在本技术一实施例中,所述碎矿头组件31包括铣刀头311以及液压粉碎头321,通过设置多种类的矿石破碎头,从而可以适应不同种类矿石的破碎。
35.在本技术一实施例中,如图4和图5所示,所述海底采矿机器人还包括铲斗72、安装块73以及第三驱动机构74。
36.铲斗72收容于所述容纳腔11内,且包纳所述壳体33的部分;所述铲斗72通过一安装轴75与所述安装块73转动连接,所述安装轴75水平设置,且所述安装轴75的轴向与所述第一预设方向aa垂直;第三驱动机构74安装于所述机体10上,且与所述安装块73连接,所述第三驱动机构74用于驱动所述安装块73沿所述第一预设方向aa水平移动,以使得所述铲斗72通过所述第二开口12出入所述容纳腔11。
37.需要说明的是,运输海底采矿机器人以及海底采矿机器人在海底行走的过程中,可以将铲斗72收容于容纳腔11内,并且铲斗72包纳所述壳体33的部分,以减小铲斗72所占
用的空间,使得海底采矿机器人的整体结构更加紧凑;需要使用铲斗72时,可以通过第三驱动机构74驱动安装块73沿第一预设方向aa水平移动,以使得铲斗72通过第二开口12移出容纳腔11,利用铲斗72可以铲取破碎后的矿石,以便于过滤收集机构40收集矿石。第三驱动机构74也可以为液压缸,利用第三驱动机构74的伸缩杆与安装块73固定连接,使得第三驱动机构74可以驱动碎矿器30沿第一预设方向aa移动。
38.继续参见图4和图5所示,在本技术一实施例中,所述海底采矿机器人还包括扫矿组件80以及第七驱动机构。
39.扫矿组件80包括转动杆81以及扫矿杆82,所述转动杆81水平设置,所述转动杆81与所述机体10转动连接,且绕所述转动杆81的轴向转动;所述扫矿杆82通过第三铰轴83与所述转动杆81铰接,所述第三铰轴83的轴向与所述转动杆81的轴向垂直;第七驱动机构安装于所述机体10上,且与所述转动杆81连接,用于驱动所述转动杆81绕所述转动杆81的轴向转动。
40.其中,所述机体10还具有用于容纳所述扫矿杆82的容纳槽13,所述转动杆81以及所述第七驱动机构均位于所述容纳槽13内,所述机体10的侧壁上开设有供所述扫矿杆82出入所述容纳槽13的第三开口14。
41.需要说明的是,不需要使用扫矿组件80时,可以将扫矿组件80收容于容纳槽13内,以减小扫矿组件80占用的空间;需要使用扫矿组件80时,绕第三铰轴83的轴向转动扫矿杆82,以将扫矿杆82从第三开口14转动出容纳槽13,此时可以通过第七驱动机构驱动转动杆81转动,带动扫矿杆82往复摆动,从而可以将破碎后的矿石扫至堆叠状态,以便于后续过滤收集机构40对矿石的收集。第七驱动机构可以为液压马达,并利用第七驱动机构的输出轴与转动杆81固定连接,使得第七驱动机构可以驱动转动杆81转动。
42.具体的,如图6所示,所述过滤收集机构40包括集料斜板41,所述集料斜板41沿远离所述机体10的方向倾斜向下;所述集料斜板41上设置有过滤孔42、输料滚轮43以及第四驱动机构,所述第四驱动机构与所述输料滚轮43连接,用于驱动所述输料滚轮43绕所述输料滚轮43的轴向转动,以将所述集料斜板41上的矿石向输运机构60输运。
43.可以理解的是,海底矿石经过碎矿器30破碎后,海底采矿机器人移动时带动集料斜板41移动,从而将破碎后的矿石铲至集料斜板41上,同时第四驱动机构驱动输料滚轮43转动,以将所述集料斜板41上的矿石向输运机构60输运,矿石在集料斜板41上移动的过程中,通过过滤孔42对矿石进行筛选,体积较小的颗粒和土壤通过过滤孔42掉落,而体积较大的矿石被输料滚轮43向输运机构60输运。第四驱动机构也可以为液压马达,并利用第四驱动机构的输出轴与输料滚轮43固定连接,使得第四驱动机构可以驱动输料滚轮43转动。
44.还需要说明的是,可以在集料斜板41的下方设置承接箱,体积较小的颗粒和土壤通过过滤孔42掉落至承接箱中,可以通过吸取器将承接箱中的矿石碎料直接吸取至滚轮式粉碎器51中进行粉碎和收集。
45.继续参见图6所示,在本技术一实施例中,所述输运机构60包括机架61、第一转动齿轮62、第二转动齿轮、第五驱动机构、输送链63以及矿石输送组件64。
46.其中,所述机架61倾斜设置,所述机架61的一端与所述过滤收集机构40连接,所述机架61的另一端与所述机体10连接;机架61可以由抗腐蚀金属,如碳素钢或低合金高强度钢等制成,机架61可以通过焊接、铆接或螺纹连接等方式固定于机体10上,集料斜板41也可
以通过焊接、铆接或螺纹连接等方式固定于机架61上。
47.第一转动齿轮62安装于所述机架61上,且靠近所述机体10设置,所述第一转动齿轮62的轴向与所述输料滚轮43的轴向平行;第二转动齿轮安装于所述机架61上,且靠近所述集料斜板41设置,所述第二转动齿轮的轴向与所述输料滚轮43的轴向平行。
48.第五驱动机构安装于所述机架61上,用于驱动所述第一转动齿轮62绕其轴向转动,或,用于驱动所述第二转动齿轮绕其轴向转动。第五驱动机构也可以为液压马达,第五驱动机构的输出轴与第一转动齿轮62或第二转动齿轮固定连接,使得第五驱动机构可以驱动第一转动齿轮62或第二转动齿轮转动。
49.输送链63整体呈环形,所述输送链63绕所述第一转动齿轮62以及所述第二转动齿轮设置,所述第一转动齿轮62以及所述第二转动齿轮均与所述输送链63啮合。
50.矿石输送组件64设置有多组,多组所述矿石输送组件64沿所述输运机构60的输运方向间隔排布,每一所述矿石输送组件64均包括第一板体641以及第二板体642,所述第一板体641与所述输送链63的外侧固定连接,所述第二板体642通过第一铰轴与所述第一板体641铰接,所述第一铰轴的轴向与所述第二转动齿轮的轴向平行。
51.其中,所述机架61上设置有第一滑道65以及第二滑道66,所述第一滑道65以及所述第二滑道66均呈环状;所述第一滑道65用于供所述第一板体641滑动,所述第二滑道66用于供所述第二板体642滑动,以使得在所述矿石输送组件64位于所述输送链63的上方时,所述第二板体642与所述第一板体641垂直,并且在所述矿石输送组件64位于所述输送链63的下方时,所述第二板体642与所述第一板体641平行。
52.可以理解的是,通过第五驱动机构驱动第一转动齿轮62或第二齿轮转动,带动输送链63移动,从而带动多个矿石输送组件64循环移动,集料斜板41上的矿石输运至输运机构60时,位于输送链63上方的矿石输送组件64中第二板体642与所述第一板体641垂直,第二板体642与第一板体641形成l形结构,从而可以将矿石向上输送至滚轮式粉碎器51中,而在所述矿石输送组件64移动至输送链63的下方时,第二板体642转动至与第一板体641平行,从而可以减小矿石输送组件64所占用的空间。
53.继续参见图6所示,具体的,所述第一滑道65可以包括第一部分以及第二部分,所述第二滑道66可以包括第三部分以及第四部分,所述第一部分、所述第二部分、所述第三部分以及所述第四部分均与所述输运机构60的输运方向平行设置。
54.其中,所述第一部分以及所述第三部分均位于所述输送链63的上方,且所述第三部分位于所述第一部分的上方;所述第二部分以及所述第四部分均位于所述输送链63的上方,且所述第二部分与所述第四部分完全重合。
55.继续参见图6所示,在本技术一实施例中,所述海底采矿机器人还包括转接板76以及第六驱动机构77,转接板76位于所述集料斜板41与所述矿石输送组件64之间,所述转接板76的一侧通过第二铰轴与所述机架61铰接,所述第二铰轴的轴向与所述第二转动齿轮的轴向平行。第六驱动机构77安装于所述机架61上,所述第六驱动机构77与所述转接板76连接,用于驱动所述转接板76绕所述第二铰轴的轴向转动,以将所述集料斜板41上的矿石转接至所述矿石输送组件64上。
56.其中,第六驱动机构77也可以为液压缸,所述第六驱动机构77的底座与所述机架61铰接,所述第六驱动机构77的伸缩杆的端部与所述转接板76铰接,从而可以驱动所述转
接板76绕所述第二铰轴的轴向转动。
57.在本技术一实施例中,所述海底采矿机器人还可以包括封包装置92(如图1),封包装置92安装于所述机体10的顶部,用于对所述矿石容器进行封包。对于本领域技术人员可知,矿石容器必然具有供矿石进入矿石容器内的开口,矿石容器装载一定量的矿石后,可以利用封包装置92可以封住开口,以避免矿石容器中的矿石掉出。封包装置92可以为线缝纫封包机或采用铁扣夹紧的方式打包的打包机,封包机以及打包机的具体工作原理在相关技术中早有公示,本技术不做赘叙。
58.还需要说明的是,海底采矿机器人进行采矿时,此时海底采矿机器位于海底,而船位于海面上,可以在船与海底采矿机器人之间连接一长条状且密封的袋装容器,而经过齿盘式粉碎器52充分粉碎后的矿石成泥状,此时可以通过吸料器91将泥状矿石向袋装容器的各段中填充,并且每填充一段就通过封包装置92对袋装容器中填充有泥状矿石的部分进行封装,以形成一个矿石容器。袋装容器的各段均装有泥状矿石后,通过船上的提升设备将袋装容器拉至船上。
59.以上所述仅为本技术的较佳实施例而已,并不用以限制本技术,凡在本技术的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。