技术特征:
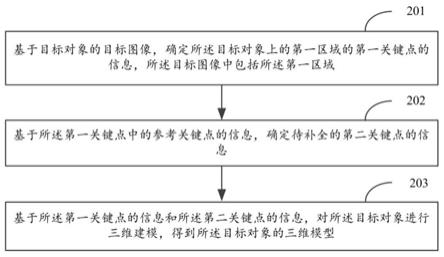
1.一种三维建模方法,其特征在于,所述方法包括:基于目标对象的目标图像,确定所述目标对象上的第一区域的第一关键点的信息,所述目标图像中包括所述第一区域;基于所述第一关键点中的参考关键点的信息,确定待补全的第二关键点的信息;基于所述第一关键点的信息和所述第二关键点的信息,对所述目标对象进行三维建模,得到所述目标对象的三维模型。2.根据权利要求1所述的方法,其特征在于,所述第一关键点中包括一个参考关键点;所述基于所述第一关键点中的参考关键点的信息,确定待补全的第二关键点的信息,包括:获取所述第二关键点与所述参考关键点之间的第一距离估计值;基于所述第一距离估计值以及所述参考关键点的信息确定所述第二关键点的信息。3.根据权利要求1所述的方法,其特征在于,所述第一关键点的数量大于或等于2;所述第一关键点中包括两个参考关键点;所述基于所述第一关键点中的参考关键点的信息,确定待补全的第二关键点的信息,包括:获取两个所述参考关键点之间的第一距离;基于所述第一距离以及预先确定的尺度因子,确定所述第二关键点与所述第一关键点中的目标关键点之间的第二距离,所述尺度因子用于表征所述第一距离与所述第二距离之间的比例关系;所述目标关键点为两个所述参考关键点中的任意一个关键点,或者所述目标关键点为所述第一关键点中除所述参考关键点以外的其他关键点;基于所述第二距离以及所述目标关键点的信息确定所述第二关键点的信息。4.根据权利要求3所述的方法,其特征在于,所述方法还包括:获取两个所述参考关键点之间的第二距离估计值;获取所述第二关键点与所述目标关键点之间的第三距离估计值;基于所述第二距离估计值与所述第三距离估计值之间的比例关系确定所述尺度因子。5.根据权利要求4所述的方法,其特征在于,所述第二距离估计值基于多个样本对象中每个样本对象的两个第一样本关键点之间的距离确定;两个所述第一样本关键点与两个所述参考关键点分别对应;所述第三距离估计值基于所述每个样本对象的第二样本关键点与第三样本关键点之间的距离确定;所述第二样本关键点与所述第二关键点相对应,所述第三样本关键点与所述目标关键点相对应。6.根据权利要求1所述的方法,其特征在于,所述参考关键点包括第一参考关键点和第二参考关键点,所述第二关键点的信息包括所述第二关键点在第一方向上的信息和所述第二关键点在第二方向上的信息;所述基于所述第一关键点中的参考关键点的信息,确定待补全的第二关键点的信息,包括:基于所述第一参考关键点的信息确定所述第二关键点在第一方向上的信息;基于所述第二参考关键点的信息确定所述第二关键点在第二方向上的信息。7.根据权利要求1所述的方法,其特征在于,所述方法还包括:基于所述第二关键点的信息以及待补全的第三关键点与所述第二关键点之间的距离确定所述第三关键点的信息;所述基于所述第一关键点的信息和所述第二关键点的信息,对所述目标对象进行三维
建模,包括:基于所述第一关键点的信息、所述第二关键点的信息和所述第三关键点的信息,对所述目标对象进行三维建模。8.根据权利要求7所述的方法,其特征在于,所述基于所述第一关键点中的参考关键点的信息,确定待补全的第二关键点的信息,包括:将关键点信息输入预先训练的神经网络,所述关键点信息包括所述参考关键点的信息以及所述第二关键点的信息的初始值,一个关键点的信息包括所述关键点的位置信息和置信度信息,所述第二关键点的置信度信息的初始值小于预设的置信度阈值;获取所述神经网络基于所述参考关键点的信息输出的所述第二关键点的信息。9.根据权利要求8所述的方法,其特征在于,所述方法还包括:在获取所述神经网络基于所述参考关键点的信息输出的所述第二关键点的信息之后,将所述第二关键点的置信度信息设置为大于所述置信度阈值的值;所述基于所述第一关键点的信息、所述第二关键点的信息和所述第三关键点的信息,对所述目标对象进行三维建模,包括:基于所述第一关键点的信息、置信度大于所述置信度阈值的第二关键点的信息和所述第三关键点的信息,对所述目标对象进行三维建模。10.根据权利要求1所述的方法,其特征在于,所述基于所述第一关键点的信息和所述第二关键点的信息,对所述目标对象进行三维建模,包括:基于所述目标图像确定所述目标对象的初始形变参数以及初始动作参数,所述初始形变参数用于表征所述目标对象的体型,所述初始动作参数用于表征所述目标对象执行的动作;基于所述目标图像中的目标对象与所述目标对象的三维模型之间的差异、所述第一关键点的信息以及所述第二关键点的信息,对所述初始形变参数和所述初始动作参数进行优化,得到优化形变参数和优化动作参数;基于优化形变参数和优化动作参数对所述目标对象进行三维建模。11.根据权利要求10所述的方法,其特征在于,所述方法还包括:基于所述目标图像确定所述目标对象的第一掩膜;基于所述初始形变参数和初始动作参数对所述目标对象进行三维建模,得到所述目标对象的初始三维模型,并基于所述初始三维模型确定所述目标对象的第二掩膜;基于所述第一掩膜与所述第二掩膜,确定所述目标图像中的目标对象与所述目标对象的三维模型之间的差异。12.根据权利要求1所述的方法,其特征在于,所述方法还包括:基于所述目标对象的三维模型对所述目标对象进行动作识别和/或行为预测;和/或基于获取的参考动作序列对所述目标对象的三维模型进行动作迁移处理。13.一种三维建模装置,其特征在于,所述装置包括:第一确定模块,用于基于目标对象的目标图像,确定所述目标对象上的第一区域的第一关键点的信息,所述目标图像中包括所述第一区域;第二确定模块,用于基于所述第一关键点中的参考关键点的信息,确定待补全的第二
关键点的信息;三维建模模块,用于基于所述第一关键点的信息和所述第二关键点的信息,对所述目标对象进行三维建模,得到所述目标对象的三维模型。14.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现权利要求1至12任意一项所述的方法。15.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现权利要求1至12任意一项所述的方法。
技术总结
本公开实施例提供一种三维建模方法和装置、计算机可读存储介质及计算机设备,所述方法包括:基于目标对象的目标图像,确定所述目标对象上的第一区域的第一关键点的信息,所述目标图像中包括所述第一区域;基于所述第一关键点中的参考关键点的信息,确定待补全的第二关键点的信息;基于所述第一关键点的信息和所述第二关键点的信息,对所述目标对象进行三维建模,得到所述目标对象的三维模型。得到所述目标对象的三维模型。得到所述目标对象的三维模型。
技术研发人员:吴文岩 李世楷 李华 钱晨
受保护的技术使用者:北京市商汤科技开发有限公司
技术研发日:2021.11.02
技术公布日:2021/11/30
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。