1.本发明涉及医疗器械领域,尤其涉及一种超声手术刀的控制方法及系统,特别为一种基于温度分布函数模型的超声刀杆温度控制方法及系统、及设置有该系统的发生器、超声刀外科器械及超声刀系统。
背景技术:
2.软组织超声切割止血手术系统(简称超声刀系统),是指将通过压电转换器(通过能量发生器将电能传递至压电转换器,由压电转换器将电能转换为机械能)获得的超声振动进一步放大,并由超声刀杆将放大后的超声振动用于对软组织的切割和凝闭的器械。临床用这种器械可在较低温度和较少出血的情况下实现病灶切除,并能确保最小的组织侧向热损伤。随着微创外科手术的普及,超声手术刀已经成为一种常规手术器械。
3.超声刀系统主要由发生器、换能器和超声刀杆组成,如图1所示,超声刀的换能器11和超声刀外壳12配接在一起,套管13位于超声刀外壳12的远端,位于最远端的超声刀杆14在套管13内部与换能器11耦接在一起,换能器11通过线缆15与发生器(未示出)连接。发生器中超声频率的电流传导至换能器,换能器将电能转化为前后振动的机械能,通过超声刀杆的传递和放大使超声刀杆末端(又称超声刀头)以一定频率(例如55.6khz)振动,摩擦产生的热量导致与刀尖接触的组织细胞内水汽化,蛋白质氢键断裂,细胞崩解重新融合,组织凝固后被切开;在切割血管时,超声刀杆与组织蛋白接触,通过机械振动产生热量,导致组织内胶原蛋白结构被破坏,造成蛋白凝固,进而封闭血管,达到止血目的。
4.超声刀杆在手术过程中由于快速的热效应,其刀头可以在短时间内形成高于300℃以上的局部高温区域,热量主要通过超声刀杆、组织和空气进行扩散。超声刀头温度过高会加快刀头尤其是垫片损耗,并且可能会对周围组织造成热损伤,不利于伤口恢复甚至引起各种并发症;超声刀头温度过低则会导致剪切过慢,严重降低手术中医生操作效率。
5.中国专利cn111542281a揭示了一种确定超声刀温度的方法,通过超声机电系统的实际谐振频率和参考谐振频率之间的差值来推断超声刀的温度。这种方式的不足之处在于:首先不同刀具之间的参考谐振频率会有明显差别并且可能会随着刀具损耗和环境状态发生变化的,该专利并未体现参考谐振频率是如何随着工作状态和其他特征参数变化的,基于实际参考谐振频率和一个参考谐振频率差值来推断超声刀的温度是不够准确的;另外实际工作中影响超声刀工作状态是一个复杂的状态函数,相位差仅仅是影响实时谐振频率的一个直接因素,其他很多特征比如实时工作电压、电流、功率,以及刀杆的物理材料特性、刀杆长度、形状、阻抗等,以及环境因素比如温度、湿度等都会影响超声刀的实时工作状态和温度,应该把这些状态都直接考虑在温度分布函数模型内,才能得到一个相对比较准确的实时温度分布。
技术实现要素:
6.本发明为了解决上述现有技术的问题,提供了一种基于温度分布函数模型的超声
刀杆温度控制方法及系统、及设置有该系统的发生器、超声刀外科器械及超声刀系统。
7.为解决以上技术问题,本发明的技术方案为:
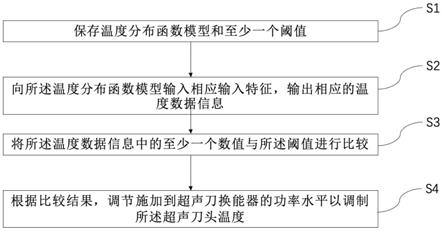
8.一种基于温度分布函数模型的超声刀杆温度控制方法,包括如下步骤,
9.s1、保存温度分布函数模型和至少一个阈值;
10.s2、向所述温度分布函数模型输入相应输入特征,输出相应的温度数据信息;
11.s3、将所述温度数据信息中的至少一个数值与所述阈值进行比较;
12.s4、根据比较结果,调节施加到超声刀换能器的功率水平以调制所述超声刀杆温度。
13.优选的,所述温度分布函数模型为神经网络算法模型,包括前馈神经网络、记忆神经网络、注意力神经网络的一种或多种算法模型组合,模型训练方法为监督学习、半监督学习、无监督学习和强化学习的一种或多种组合。
14.优选的,所述模型训练方法具体为从训练集中提取输入特征,输入至所述神经网络算法模型中计算每个神经元的中间值和梯度值,模型的损失函数可以为均方误差mse或者平均绝对误差mae,并利用梯度下降法进行权重更新,重复以上过程直到模型达到预定的停止条件,达到停止条件后停止训练并保存模型。
15.优选的,所述温度分布函数模型的输入特征包括工作反馈参数,物理结构特征参数,环境参数的一种或多种组合。
16.优选的,所述工作反馈参数包括但不限于实时电压u、实时电流i、功率p、阻抗r、实时谐振频率f;所述物理结构特征参数包括但不限于超声刀刀杆材料、刀杆长度;所述环境参数包括但不限于环境温度、环境湿度。
17.优选的,所述温度数据信息包括所述超声刀刀杆上任意一点的实时温度值,和/或超声刀刀杆某个区域的最大温度值、最小温度值、平均温度。
18.优选的,所述温度分布函数模型由层和相应的神经元及权重构成,权重参数和应用程序保存在发生器内存中,内存为flash、eeprom或者其他非易失存储设备,应用程序在处理器中运行,所述处理器或为存在于所述发生器中的arm、dsp、fpga、cpu、gpu或者asic芯片,或为通过网络连接的远程服务器。
19.优选的,所述步骤s2中,输出的温度数据信息沿着超声刀刀杆形成一维空间温度分布t(l),其为方程的一个解。
20.本发明还揭示了一种基于温度分布函数模型的超声刀杆温度控制系统,包括:
21.存储单元,用于保存温度分布函数模型和至少一个阈值;
22.处理单元,用于向所述温度分布函数模型输入相应输入特征,输出相应的温度数据信息;
23.比较单元,用于将所述温度数据信息中的至少一个数值与所述阈值进行比较;
24.调节单元,用于根据比较结果,调节施加到超声刀换能器的功率水平以调制所述超声刀杆温度。
25.本发明还揭示了一种基于温度分布函数模型进行温度控制的发生器,包括:
26.控制电路,所述控制电路耦接到存储器,所述控制电路被配置为能够:
27.保存温度分布函数模型和至少一个阈值;
28.向所述温度分布函数模型输入相应输入特征,输出相应的温度数据信息;
29.将所述温度数据信息中的至少一个数值与所述阈值进行比较;以及
30.根据比较结果,调节施加到超声刀换能器的功率水平以调制所述超声刀杆温度。
31.优选的,所述控制电路被配置为向所述温度分布函数模型输入的输入特征包括工作反馈参数,物理结构特征参数,环境参数的一种或多种组合。
32.优选的,所述工作反馈参数包括但不限于实时电压u、实时电流i、功率p、阻抗r、实时谐振频率f;所述物理结构特征参数包括但不限于超声刀刀杆材料、刀杆长度;所述环境参数包括但不限于环境温度、环境湿度。
33.优选的,所述温度数据信息包括所述超声刀杆上任意一点的实时温度值,和/或超声刀刀杆某个区域的最大温度值、最小温度值、平均温度。
34.本发明还揭示了一种基于温度分布函数模型的超声刀外科器械,包括:
35.超声机电系统,所述超声机电系统包括经由超声波导联接到超声刀的超声换能器;以及
36.发生器,所述发生器被配置为向所述超声换能器供应功率,其中所述发生器包括控制电路,所述控制电路被配置为能够:
37.保存温度分布函数模型和至少一个阈值;
38.向所述温度分布函数模型输入相应输入特征,输出相应的温度数据信息;
39.将所述温度数据信息中的至少一个数值与所述阈值进行比较;以及
40.根据比较结果,调节施加到超声刀换能器的功率水平以调制所述超声刀杆温度。
41.优选的,所述控制电路被配置为向所述温度分布函数模型输入的输入特征包括工作反馈参数,物理结构特征参数,环境参数的一种或多种组合,所述工作反馈参数包括但不限于实时电压u、实时电流i、功率p、阻抗r、实时谐振频率f;所述物理结构特征参数包括但不限于超声刀刀杆材料、刀杆长度;所述环境参数包括但不限于环境温度、环境湿度。
42.优选的,所述温度数据信息包括所述超声刀刀杆上任意一点的实时温度值,和/或超声刀刀杆某个区域的最大温度值、最小温度值、平均温度。
43.本发明还揭示了一种基于温度分布函数模型的超声刀系统,包括处理器和非易失存储设备,其中所述非易失存储设备包含应用程序,所述应用程序在由所述处理器执行时致使所述处理器:
44.保存温度分布函数模型和至少一个阈值;
45.向所述温度分布函数模型输入相应输入特征,输出相应的温度数据信息;
46.将所述温度数据信息中的至少一个数值与所述阈值进行比较;以及
47.根据比较结果,调节施加到超声刀换能器的功率水平以调制所述超声刀杆温度。
48.优选的,所述温度分布函数模型由层和相应的神经元及权重构成,权重参数和应用程序保存在发生器内存中,内存为flash、eeprom或者其他非易失存储设备,应用程序在处理器中运行,所述处理器或为存在于所述发生器中的arm、dsp、fpga、cpu、gpu或者asic芯片,或为通过网络连接的远程服务器。
49.本发明的有益效果主要体现在:超声刀杆工作时刀杆实际温度为沿着刀杆的一维空间分布,其上温度分布由超声刀杆实时工作反馈参数、物理结构特征参数以及周围环境参数集合决定,每个温度分布对应于温度分布函数的一个解,利用机器学习算法可以逼近
该函数;超声刀杆工作时根据其实时谐振频率、电压、电流、阻抗、功率及外形和环境等特征参数,输入机器学习算法模型就可以估计出超声刀刀杆的实时温度分布,进而根据估计的温度进行功率控制,准确有效。
附图说明
50.图1是现有技术中超声刀的结构配置示意图;
51.图2是典型的多层前馈神经网络结构示意图;
52.图3是lstm门控神经元结构示意图;
53.图4是本发明模型建立训练保存方法示意图;
54.图5是本发明基于温度分布函数模型预测温度的流程图;
55.图6是本发明基于温度分布函数模型预测的温度与实际温度的比较图;
56.图7是本发明基于温度分布函数模型预测温度的第一种实施例的流程图;
57.图8是本发明基于温度分布函数模型预测温度的第二种实施例的流程图;
58.图9是本发明根据基于温度分布函数模型预测得到的温度后进行后续控制的流程图。
具体实施方式
59.以下将结合附图所示的具体实施方式对本发明进行详细描述。但这些实施方式并不限于本发明,本领域的普通技术人员根据这些实施方式所做出的结构、方法、或功能上的变换均包含在本发明的保护范围内。
60.超声刀系统在工作过程中利用锁相算法改变换能器的工作频率使换能器工作在最大工作效率状态,也就是谐振状态。在谐振状态下,声波在超声刀刀杆上传播必须满足驻波条件,假设超声刀刀杆长度为l,声波波长为λ,声速为v,谐振频率为f,则在谐振状态下必须满足以下工作条件:
[0061][0062]
其中n为正整数。
[0063]
假设声波周期为τ,则满足以下公式:
[0064][0065]
可以得到:
[0066][0067]
实际工作中热量沿着超声刀刀杆的设置方向扩散,因此在超声刀刀杆不同位置温度可能不同,不同位置温度t表示为:
[0068]
t=t(l)
ꢀꢀꢀ
(4)
[0069]
t(l)为刀杆上的一个位置温度分布函数,l的范围为0~l,超声刀杆刀尖一侧顶点位置为坐标原点。
[0070]
温度可以影响刀杆的杨氏模量,最终影响声波速度,刀杆上不同位置的声速v可以
表示为温度的函数:
[0071]
v(l)=v(t(l))
ꢀꢀꢀ
(5)
[0072]
公式(1)可以表示为:
[0073][0074]
公式(6)可以表示为:
[0075][0076]
公式(7)为一个积分方程,对于确定时间点,f为确定的谐振频率,温度t(l)受电压、电流、功率、阻抗、刀杆形状、环境参数等参数影响。在n、f和l确定的情况下积分方程的温度分布函数t(l)可能有无穷多个解,对于不同的刀杆,会有更多种不同的温度分布。
[0077]
鉴于此,本发明揭示了一种机器学习算法模型,具体为神经网络算法模型,人工神经网络算法模型是一种受人脑神经系统启发而构造的数学模型,与生物神经元类似,由多个节点(人工神经元)互相连接而成,可以用来对数据之间的复杂关系进行建模。不同节点之间的连接被赋予不同的权重,每个权重代表一个节点对另外一个节点的影响大小。每个节点代表一种特定函数,来自其他节点的信息经过其相应的权重综合计算,输入到一个激活函数中并得到一个新的活性值。激活函数用来引入非线性元素,增加神经网络的表达能力,常用的激活函数有sigmoid,tanh,relu等。
[0078]
从系统观点来看,人工神经元是由大量神经元通过极其丰富和完善的连接而构成的自适应非线性动态系统。目前最常用的神经网络学习算法为反向传播算法,优化方法为梯度下降算法。理论上,一个两层的神经网络就可以逼近任意的函数,增加网络层数可以让神经网络在相同的神经元数量下具有更强的表示能力。目前比较常用的神经网络模型有前馈神经网络模型、记忆神经网络模型及注意力神经网络模型等:多层感知机(multilayer perceptron,mlp)和卷积神经网络(convolutional neural network,cnn)为前馈神经网络模型;循环神经网络(recurrent neural network,rnn)为记忆神经网络模型,常用的rnn模型包括门控神经单元(gate recurrent unit,gru)和长短期记忆神经网络(long short
‑
term memory,lstm);注意力神经网络模型包括transformer等。
[0079]
一个典型的多层前馈神经网络模型如图2所示,包含输入层,若干个隐藏层和一个输出层,输入信息x经过每个层进行前向传播最终得到输出y。
[0080]
每一层的信息传播公式为:
[0081]
a
l
=f
l
(w
l
a
l
‑1 b
l
)
ꢀꢀꢀ
(8)
[0082]
其中a
l
‑1为第l层输入,a
l
为第l层输出,f
l
为第l层神经元的激活函数,w
l
为第l
‑
1层到第l层的权重矩阵,b
l
为第l
‑
1到第l层的偏置。
[0083]
记忆神经网络模型在前馈神经网络基础上增加了记忆能力,常用来处理时序数据,常用的记忆神经网络包括rnn、gru、lstm等。gru和lstm具有长期的记忆能力,能够处理长时间序列。
[0084]
一个典型的长短期记忆神经网络模型(long short
‑
term memory,lstm)的门控神经元结构如图3所示,lstm的神经元通过门控机制来控制信息传递的路径,三个门分别为输入门i,遗忘门f,和输出门o,这三个门的作用为:输入门i控制当前时刻的候选状态有多
少要保存;遗忘门f控制上一时刻内部状态c
t
‑1要遗忘多少信息;输出门o控制当前时刻的内部状态c
t
有多少信息要输出给外部状态ht。通过lstm循环单元,整个神经网络可以建立较长距离的时序依赖关系。
[0085]
其中,三个门分别为:
[0086]
i=σ(w
i
[h
t
‑1,χ
t
] b
i
)
ꢀꢀꢀ
(9)
[0087]
f=σ(w
f
[h
t
‑1,χ
t
] b
f
)
ꢀꢀꢀ
(10)
[0088]
o=σ(w
o
[h
t
‑1,χ
t
] b
o
)
ꢀꢀꢀ
(11)
[0089]
内部状态更新公式为:
[0090][0091][0092]
h
t
=o
⊙
tanh(c
t
)
ꢀꢀꢀ
(14)
[0093]
本发明温度分布函数模型可以基于机器学习算法模型包括神经网络算法模型中的一种或者多种算法模型组合。输入特征包括工作反馈参数,物理结构特征参数,环境参数的一种或多种组合。所述工作反馈参数包括但不限于实时电压u、实时电流i、功率p、阻抗r、实时谐振频率f;所述物理结构特征参数包括但不限于超声刀杆材料、长度;所述环境参数包括但不限于环境温度、环境湿度。
[0094]
输入特征越完备,神经网络模型的逼近能力越强。本发明模型中,电压u和电流i由发生器实时采样得到,实时功率p和阻抗r可以由以下公式计算得到:
[0095]
p=u
×
i
ꢀꢀꢀ
(15)
[0096][0097]
实时频率f由以下公式计算得到:
[0098]
f=k
×
(θ
‑
θ0)
ꢀꢀꢀ
(17)
[0099]
其中,k由实时电压u和电流i的一个函数关系确定:
[0100]
k=k(u,i)
ꢀꢀꢀ
(18)
[0101]
超声刀刀杆材料、长度等物理结构特征参数可以保存在超声刀或者发生器的存储芯片中,发生器直接读取相应的存储芯片可以得到这些特征参数,环境参数可以通过传感器进行实时测量得到。
[0102]
本发明温度分布函数模型可以同时估计一种或者多种温度数据信息,包括但不限于所述超声刀刀杆上任意一点的实时温度值,和/或所述超声刀刀杆某个区域的最大温度值、最小温度值、平均温度。
[0103]
本发明模型训练方法可以为监督学习、半监督学习、无监督学习和强化学习等方式。监督学习需要采集模型的所有输入特征信息以及训练标签,可以以一定的时间间隔采集,时间间隔可以为1ms或者10ms,并测量实时温度作为监督训练标签,实时剪切温度点可以采用嵌入或者外部的温度传感器或者红外测温仪来测量得到,采集大量标记数据得到作为训练数据集s。
[0104]
模型监督学习实现的一种神经网络模型训练过程如图4所示,从训练数据集s中取输入特征,并输入神经网络模型计算每个神经元的中间值和梯度值,模型的损失函数可以
为均方误差mse或者平均绝对误差mae,并利用梯度下降法进行权重更新,重复以上过程直到模型达到预定的停止条件,比如预测精度达到目标值或者损失不再减小,达到停止条件后停止训练并保存模型,这个模型即可以表示所有目标超声刀工作时刀杆包括刀尖上的温度分布的函数。
[0105]
训练好的模型由各个层和相应的神经元及权重构成,权重参数和应用算法程序保存在发生器内存中,内存可以为flash、eeprom或者其他非易失存储设备中,应用程序在处理器中运行,处理器可以为存在于发生器中的arm、dsp、fpga、cpu、gpu或者asic芯片,也可以为通过网络连接的远程服务器。
[0106]
本发明温度分布函数模型估算温度方法如图5所示,将实时超声刀特征参数集x输入模型,模型根据输入的特征集合可以找到最可能的刀杆温度分布,目标温度t
est
可以由在该温度分布中得到,t
est
即为实时目标温度值。
[0107]
如图6所示,图中曲线为超声刀剪切牛皮的温度变化曲线,其中实线为实际温度,实际温度由红外测温仪实时测量得到,虚线为模型实时估计温度,每隔10ms估计一次实时温度,共有大概1500个温度预测点,温度预测范围为60℃~350℃,可以看到模型能够比较准确地预测温度值,仅仅在开始剪切点和350℃附近可能会有小幅度温度偏差。
[0108]
本发明基于该温度分布函数模型进行的超声刀杆温度控制方法,为根据预测的实时温度进行超声刀输出能量控制,如图9所示,具体包括步骤:
[0109]
向所述温度分布函数模型输入相应输入特征,输出相应的温度数据信息;
[0110]
将所述温度数据信息中的至少一个数值与所述阈值进行比较;
[0111]
根据比较结果,调节施加到超声刀换能器的功率水平以调制所述超声刀杆温度。
[0112]
其中一种实现的方法如图7所示,预先设置温度阈值t0,t0可以对应一个高温阈值。当预测的实时温度高于该阈值时可以通过逐步减低电压或者电流来降低输出功率,从而有效降低温度。一种降低功率方法为每隔200ms降低5%电流。功率调整方向可能为增大、减小或者保持不变。功率调整可以通过调整输出电压或电流来实现,调整时间间隔和调整幅度值可以不局限于当前值。功率调整阈值可以包含多个温度阈值,温度阈值可以为0~600℃内的任意温度。
[0113]
另外一种实现的方法如图8所示,该控制方法包含第一温度阈值t1,第二温度阈值t2。当预测的实时温度低于第一温度阈值t1增加输出功率,当温度在第一温度阈值t1与第二温度阈值t2之间时保持恒定功率,温度高于第二温度阈值t2时降低输出功率。输出功率控制方法不限于以上控制方法,也可以为符合该控制框架的其他控制方法。
[0114]
本发明还揭示了一种发生器,包括:
[0115]
控制电路,所述控制电路耦接到存储器,所述控制电路被配置为能够:
[0116]
保存温度分布函数模型和至少一个阈值;
[0117]
向所述温度分布函数模型输入相应输入特征,输出相应的温度数据信息;
[0118]
将所述温度数据信息中的至少一个数值与所述阈值进行比较;以及
[0119]
根据比较结果,调节施加到超声刀换能器的功率水平以调制所述超声刀杆温度。
[0120]
本发明还揭示了一种超声刀外科器械,包括:
[0121]
超声机电系统,所述超声机电系统包括经由超声波导联接到超声刀的超声换能器;以及
[0122]
发生器,所述发生器被配置为向所述超声换能器供应功率,其中所述发生器包括控制电路,所述控制电路被配置为能够:
[0123]
保存温度分布函数模型和至少一个阈值;
[0124]
向所述温度分布函数模型输入相应输入特征,输出相应的温度数据信息;
[0125]
将所述温度数据信息中的至少一个数值与所述阈值进行比较;以及
[0126]
根据比较结果,调节施加到超声刀换能器的功率水平以调制所述超声刀杆温度。
[0127]
本发明还揭示了一种超声刀系统,包括处理器和非易失存储设备,其中所述非易失存储设备包含应用程序,所述应用程序在由所述处理器执行时致使所述处理器:
[0128]
保存温度分布函数模型和至少一个阈值;
[0129]
向所述温度分布函数模型输入相应输入特征,输出相应的温度数据信息;
[0130]
将所述温度数据信息中的至少一个数值与所述阈值进行比较;以及
[0131]
根据比较结果,调节施加到超声刀换能器的功率水平以调制所述超声刀杆温度。
[0132]
以上仅是本发明的优选实施方式,应当指出的是,上述优选实施方式不应视为对本发明的限制,本发明的保护范围应当以权利要求所限定的范围为准。对于本技术领域的普通技术人员来说,在不脱离本发明的精神和范围内,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。