1.本公开涉及一种控制器局域网(can)节点收发器。本公开还涉及以下中的一种:一种包括can控制器和can收发器的can节点,以及一种操作所述控制器或收发器的方法。
背景技术:
2.can网络通过总线来实现节点之间的通信。连接到总线的节点可以将数据传输到连接到总线的其它节点并从这些节点接收数据。can网络实施用于限定节点之间的通信的can协议。
技术实现要素:
3.根据本公开的第一方面,提供一种控制器局域网can收发器,包括:
4.两个总线端,所述两个总线端用于将所述收发器耦合到can总线;
5.发射器布置,所述发射器布置被配置成基于在传输输入处接收到的传输数据而经由所述总线端在所述can总线上传输信令,所述传输输入包括用于耦合到can控制器的端,所述发射器布置包括被配置成基于传输信号而将所述总线驱动为显性状态或隐性状态的至少一个发射器,并且包括连接到所述两个总线端的阻抗控制装置;
6.信令检测器,所述信令检测器被配置成检测来自所述控制器的在所述传输输入处与所述传输数据一起接收到的信令,所述信令检测器被配置成确定在所述传输数据从逻辑零状态转变成逻辑一状态之前所述传输数据包括所述逻辑零状态的时间长度,并且:
7.基于所述时间长度长于预定阈值,由所述阻抗控制装置根据第一方案提供对输出阻抗的控制,包括当连接到所述can收发器的can总线上的差分驱动电压减小到预定义电压时,将所述输出阻抗控制在所述显性状态下的阻抗值的预定义范围内,然后在第一预定时间持续时间内增大所述输出阻抗;以及
8.基于所述时间长度短于所述预定阈值,提供以下操作中的一项:根据不同于所述第一方案的第二方案控制所述输出阻抗;以及所述阻抗控制装置不控制所述输出阻抗。
9.在一个或多个实施例中,所述信令检测器包括时间滤波器,所述时间滤波器被配置成基于所述时间长度长于或短于所述预定阈值而提供切换信号,其中所述信令检测器另外包括多路复用器,所述多路复用器被配置成接收所述切换信号并基于所述切换信号而在以下状态之间切换:
10.第一状态,在所述第一状态下,所述多路复用器被配置成连接第一控制块以将信令提供到所述阻抗控制装置以提供所述第一方案;以及
11.第二状态,在所述第二状态下,所述多路复用器被配置成:连接第二控制块以将信令提供到所述阻抗控制装置以提供所述第二方案;或使所述第一控制块与所述阻抗控制装置断开连接。
12.在一个或多个实施例中,基于所述时间长度短于所述预定阈值,所述信令检测器被配置成根据所述第二方案提供对所述输出阻抗的控制。
13.在一个或多个实施例中,所述发射器布置包括第一发射器和第二发射器,所述第一发射器被配置成在所述总线端处施加电压以朝向所述显性状态增大所述总线的至少两个导线之间的电位差,所述第二发射器被配置成在所述总线端处施加电压以朝向所述隐性状态减小所述总线的所述至少两个导线之间的所述电位差,其中:
14.基于所述时间长度短于所述预定阈值,所述信令检测器被配置成去激活所述第二发射器。
15.在一个或多个实施例中,所述预定阈值小于125纳秒。
16.在一个或多个实施例中,所述第一方案包括在由所述转变开始的隐性位持续时间内进行以下操作,所述操作使得所述发射器布置将所述总线从所述显性状态驱动为所述隐性状态:
17.当所述can总线上的所述差分电压在第一预定持续时间(t0到t1)内减小到表示所述隐性状态的所述预定义电压时,控制所述阻抗控制装置以提供在所述显性状态下的阻抗值的所述预定义范围内的输出阻抗;以及
18.随后,当所述can总线上的所述差分驱动电压在所述第一预定持续时间之后的第二预定持续时间(t2到t3)内保持在所述预定义电压下时,将所述阻抗控制装置的所述输出阻抗增大到所述can总线的特性阻抗,并且在第三预定持续时间(t3到t4)内将所述阻抗控制装置的所述输出阻抗维持为所述can总线的所述特性阻抗;以及
19.并且随后,当所述can总线上的所述差分驱动电压在所述第三预定持续时间(t2到t3)之后的第四预定持续时间(t4到t5)内保持在所述预定义电压下时,将所述can收发器(220,420)的所述输出阻抗从所述can总线的所述特性阻抗增大到更高的欧姆值。
20.在一个或多个实施例中,所述第二方案包括在由所述转变开始的隐性位持续时间内进行以下操作,所述操作使得所述发射器布置从所述显性状态变为所述隐性状态:
21.当所述can总线上的所述差分电压在所述第二方案的第一预定持续时间(t0到t1)内减小到所述预定义电压时,将所述阻抗控制装置的输出阻抗控制在所述显性状态下的阻抗值的所述预定义范围内;以及
22.随后,当所述can总线上的所述差分电压在所述第一预定持续时间之后的所述第二方案的第二预定持续时间(t2到t3)内保持在所述预定义电压下时,将所述阻抗控制装置的所述输出阻抗直接增大到高阻抗,所述高阻抗包括高于所述can总线的特性阻抗的阻抗,并且在所述隐性位持续时间的至少其余部分或全部持续时间内维持所述高阻抗。
23.在一个或多个实施例中,所述阻抗控制装置包括阻抗电桥,所述阻抗电桥包括两个支脚,并且其中所述两个支脚中的每一个支脚包括串联连接在电压供应轨与接地轨之间并且连接到两个can总线端中的相应一个can总线端的可调整挽式电阻器(pull resistor)和可调整推式电阻器(push resistor)。
24.在一个或多个实施例中,所述收发器包括接收器布置,所述接收器布置耦合到所述两个总线端并且被配置成从所述can总线接收信令,生成数字,基于所述信令而接收数据,并将所述接收到的数据提供到接收输出,所述接收输出用于耦合到所述can控制器。
25.在一个或多个实施例中,所述发射器布置被配置成在第一传输模式或第二传输模式中的任何时间操作,其中在所述第一传输模式中,所述发射器布置被配置成利用第一性质传输所述信令,并且当所述发射器布置处于所述第二传输模式中时,所述发射器布置被
配置成利用不同于所述第一性质的第二性质传输所述信令;其中
26.基于由所述信令检测器确定的所述时间长度长于预定阈值,所述发射器布置被配置成在所述第一传输模式中操作;以及
27.基于由所述信令检测器确定的所述时间长度短于预定阈值,所述发射器布置被配置成在所述第二传输模式中操作。
28.在一个或多个实施例中,所述第一性质和所述第二性质包括以下各项中的一个或多个:
29.分别包括用于传输所述信令的第一波特率和用于传输所述信令的第二波特率,其中所述第二波特率大于所述第一波特率;
30.分别包括用于表示施加到所述can总线的所述信令中的逻辑一和逻辑零的第一电压电平方案和用于表示施加到所述can总线的所述信令中的逻辑一和逻辑零的第二电压电平方案,其中所述第一电压电平方案的电压电平不同于所述第二电压电平方案的所述电压电平。
31.根据本公开的第二方面,我们提供一种控制器局域网can控制器与根据在前的任一项权利要求所述的can收发器的组合,所述can控制器包括:
32.传输输出,所述传输输出被配置成将传输数据提供到所述can收发器以用于在所述can总线上传输;
33.接收输入,所述接收输入被配置成从所述can收发器接收接收到的数据,所述数据表示从所述can总线接收到的信令;以及
34.功能选择器,所述功能选择器被配置成向模式信号提供所述传输数据,所述模式信号指示所述can收发器在第二传输模式而不是第一传输模式中操作并根据所述第一方案停用所述阻抗控制装置的操作,其中所述模式信号包括所述控制器被配置成提供传输数据,在所述传输数据从逻辑零状态转变为逻辑一状态之前,所述传输数据包括所述逻辑零状态的时间长度小于所述预定阈值。
35.在一个或多个实施例中,所述can控制器被配置成当所述收发器处于所述第二传输模式中时在第二波特率下提供所述传输数据,所述第二波特率大于当所述收发器处于所述第一传输模式中时使用的第一波特率,并且其中所述第二波特率使得所述第二波特率的位时间小于所述预定阈值。
36.在一个或多个实施例中,所述can控制器被配置成当未提供所述模式信号时在所述第一波特率下提供所述传输数据,其中所述第一波特率使得所述第一波特率的位时间大于所述预定阈值,由此根据所述第一方案提供所述阻抗控制装置的操作。
37.根据本公开的第三方面,我们提供一种用于操作控制器局域网can收发器的方法,所述can收发器包括用于将所述收发器耦合到can总线的两个总线端和被配置成基于在传输输入处接收到的传输数据而经由所述总线端在所述can总线上传输信令的发射器布置,所述传输输入包括用于耦合到can控制器的端,所述发射器布置包括被配置成基于传输信号而将所述总线驱动为显性状态或隐性状态的至少一个发射器,并且包括连接到所述两个总线端的阻抗控制装置;所述方法包括:
38.使用信令检测器,检测来自所述控制器的在所述传输输入处与所述传输数据一起接收到的信令;
39.确定在所述传输数据从逻辑零状态转变为逻辑一状态之前所述传输数据包括所述逻辑零状态的所述时间长度,并且:
40.基于所述时间长度长于预定阈值,由所述阻抗控制装置根据第一方案提供对输出阻抗的控制,包括当连接到所述can收发器的can总线上的差分驱动电压减小到预定义电压时,将所述输出阻抗控制在所述显性状态下的阻抗值的预定义范围内,然后在第一预定时间持续时间内增大所述输出阻抗;以及
41.基于所述时间长度短于所述预定阈值,提供以下操作中的一项:根据不同于所述第一方案的第二方案控制所述输出阻抗;以及所述阻抗控制装置不控制所述输出阻抗。
42.虽然本公开容许各种修改和替代形式,但其细节已经借助于例子在附图中示出且将详细地描述。然而,应理解,也可能存在除所描述的特定实施例以外的其它实施例。也涵盖属于所附权利要求书的精神和范围内的所有修改、等效物和替代实施例。
43.以上论述并不意图呈现在当前或将来权利要求集的范围内的每一示例实施例或每一实施方案。附图和具体实施方式还举例说明了各种示例实施例。结合附图考虑以下具体实施方式可更全面地理解各种示例实施例。
附图说明
44.现将仅借助于例子参考附图描述一个或多个实施例,在附图中:
45.图1示出了具有多个节点的can总线网络的例子;
46.图2示出了第一示例节点;
47.图3示出了第二示例节点;
48.图4示出了包括阻抗电桥的节点的示例发射器布置;
49.图5示出了示出图4中所描绘的发射器布置的操作的示例信号时序图;
50.图6示出了根据本公开的第一示例收发器;
51.图7示出了根据本公开的第二示例收发器;
52.图8示出了示出图6中所描绘的收发器的操作的示例信号时序图;
53.图9示出了示出图7中所描绘的收发器的操作的示例信号时序图;
54.图10示出了示出本公开的方法的示例流程图。
具体实施方式
55.控制器局域网can通常包括各自连接到双线can总线的多个节点。节点可以通过将信令发送到can总线和从can总线接收信令来彼此通信。
56.控制器局域网(can)是通常在汽车内使用的基于消息的通信总线协议。can总线协议用于实现各个电子控制单元(ecu)之间的通信,所述ecu例如发动机控制模块(ecm)、传动系控制模块(pcm)、安全气囊、防震刹车、巡航控制、电动助力转向、音频系统、窗户、门、后视镜调整、用于混合/电动汽车的电池和再充电系统等等。can协议的数据链路层被标准化为国际标准组织(iso)11898
‑
1:2003。作为标准化can数据链路层协议的扩展并集成到iso 11898
‑
1:2015标准中的can灵活数据速率或“can fd”可提供更高的数据速率。
57.图1示出了总线系统或网络100的例子,所述总线系统或网络100具有被耦合以经由总线102通信的多个节点101。图2更详细地示出了多个节点101中的一个节点101的例子,
并且使用了相同的元件符号。
58.多个节点101也可被称作“ecu”或can节点或can总线装置,其各自连接到can总线102。在此例子中,每个can节点包括控制器110,所述控制器110可以包括具有嵌入的can协议控制器114和can收发器120的微控制器。微控制器通常连接到至少一个装置(未示出),例如传感器、致动器或某种其它控制装置,并且被编程为确定接收到的消息的含义并产生合适的传出消息。本领域中已知还称为主机处理器、主机或数字信号处理器(dsp)的微控制器。在例子中,主机支持与can协议控制器交互的应用程序软件。
59.如本领域中已知,可以嵌入在微控制器110内或在微控制器(例如,单独的ic装置)外部的can协议控制器114实施数据链路层操作。举例来说,在接收操作中,can协议控制器可以存储从收发器120接收到的串行位,直到全部消息可用于通过微控制器提取。can协议控制器还可以根据can协议的标准化帧格式对can消息进行解码。在传输操作中,can协议控制器114可以被配置成从微控制器110接收消息并将消息作为串行位(在本文中被称作“传输数据”)以can帧格式传输到can收发器120。
60.can收发器120位于控制器110与can总线102之间并且实施物理层操作。举例来说,在接收操作中,can收发器将来自can总线的模拟差分信号转换成can协议控制器114可以解译的串行数字信号。can收发器120还保护can协议控制器免受can总线上例如电浪涌等极端电气条件的影响。在传输操作中,can收发器120将从can协议控制器接收到的传输数据的串行数字位转换成在can总线上发送的模拟差分信号。
61.can总线102携载模拟差分信号并且包括can高(canh)总线导线124和can低(canl)总线导线126。can总线导线可包括双绞线。can总线在本领域中是已知的。
62.因此,参考示例图2,节点101包括控制器110,例如微控制器。can控制器110使用can收发器120将信令提供到can总线102并从can总线102接收信令。因此,can收发器120通常基于从can控制器110接收到的传输数据而将信令提供到can总线,并且基于所述can收发器120从can总线102接收到的信令而将接收到的数字数据提供到can协议控制器114。can收发器120可以被配置成基于传输数据利用适用于逻辑高和逻辑低的电压电平并且根据can协议利用适用于双导线can总线的差分信令将信令提供到can总线102。
63.本文中对can收发器或can控制器的提及可理解为至少部分地实施全部或部分can协议或者全部或部分can fd协议的控制器和收发器。本文中针对can收发器或can控制器(包括其协议控制器)描述的功能可包括比目前在can协议中限定的功能更多的功能。
64.can控制器110被配置成在传输输出104处提供传输数据以供在can收发器120的传输输入105处接收。传输输出104和传输输入105可以包括集成电路引脚。因此,传输输入引脚105被配置成从can控制器110接收传输数据。can收发器120被配置成从can总线102接收信令并基于信令将接收到的数据(作为串行数字数据流)提供到接收输出106以供在can控制器110处的接收输入107处接收。接收输出106和接收输入107可以包括集成电路引脚。
65.can收发器120包括被配置成基于所述传输数据而在can总线102上传输信令的发射器布置108。can收发器120还包括被配置成从can总线102接收信令并基于所述信令而提供接收到的数据的接收器布置115。
66.发射器布置108包括至少一个发射器,并且在此例子中包括两个发射器111、112。第一发射器111可以被配置成将总线102驱动为显性状态,并且因此表示逻辑0。第二发射器
112可以被配置成将总线102(在一些例子中,以及第一发射器111)驱动为隐性状态,并且因此表示逻辑1。发射器111、112中的每一个发射器具有两个输出以将信令提供到双线can总线102。将了解,显性状态和隐性状态已为can领域的技术人员所知。接收器布置115包括具有两个输入以从can总线接收差分信令的至少一个接收器116。
67.至少一个发射器111、112可以被配置成在第一传输模式或第二传输模式中操作,其中在第一传输模式中,发射器布置被配置成利用第一性质传输所述信令,并且其中在第二传输模式中,发射器布置被配置成利用第二性质传输所述信令。第一性质和第二性质可包括一个或多个性质类型,例如波特率(例如,最大、最小或平均波特率)、电压电平方案、编码方案或其它。然而,为了便于在本文中解释,第一性质和第二性质可包括波特率,使得第一性质包括第一波特率,并且第二性质包括第二波特率,其中第二波特率高于第一波特率。使用更高的波特速率可提高数据可在can总线上传输的速率。然而,应了解,可替换的是,或另外,第一性质和第二性质可(在本文中的任何示例实施例中)为用于表示can总线102上的逻辑0和逻辑1的电压电平方案。
68.在此例子中,在第一传输模式中,发射器布置108被配置成在更低的波特率下传输信令,并且利用第一电压电平方案传输所述信令以表示can总线上的逻辑高和逻辑低。在此例子中,在第二传输模式中,发射器布置108被配置成在更高的波特率下传输信令,并且利用第二电压电平方案传输所述信令以表示can总线上的逻辑高和逻辑低,所述第二电压电平方案不同于第一电压电平方案。
69.至少一个接收器可以被配置成在第一接收模式或第二接收模式中操作,其中在第一接收模式中,接收器布置115被配置成利用第一性质从总线102接收信令,并且在第二接收模式中,接收器布置115被配置成利用第二性质从总线102接收信令。如上文所描述,性质可以是波特率、电压电平方案、编码方案或其它中的任何一个或多个。
70.在此例子中,在第一接收模式中,接收器布置115被配置成在更低的波特率下接收信令,并且利用第一电压电平方案接收所述信令以表示can总线上的逻辑高和逻辑低。在此例子中,在第二接收模式中,接收器布置115被配置成在更高的波特率下接收信令,并且利用第二电压电平方案接收所述信令以表示can总线上的逻辑高和逻辑低,所述第二电压电平方案不同于第一电压电平方案。
71.第一传输模式和第一接收模式可以包括遵循由can fd协议指定的电压电平和时序的模式。第二传输模式和第二接收模式可以包括作为can协议的扩展的一部分的模式,在所述模式中需要更高的波特率。
72.可以通过can控制器101确定收发器120是否需要在第二传输模式而不是第一传输模式中操作。在一个或多个例子中,可能有必要可靠且稳健地将此要求用信号发送到can收发器120,并且其方式使得can收发器120的发射器布置108和/或接收器布置可以可靠且稳健地在第一传输模式与第二传输模式之间以及第二传输模式与第一传输模式之间转变。
73.在一个或多个例子中,来自can控制器110的从传输输出104发送并且由can收发器120接收的模式变化信令可以用于用信号发送传输模式变化和/或接收模式变化。因此,模式变化信令可以叠加在传输数据位上、嵌入于传输数据位中,或以其它方式与传输数据位一起或在传输数据位之间提供。
74.示例图3示出了用于接收模式变化信令的收发器120的示例配置。在示例图3中,为
简单起见,发射器布置108示出为具有单个发射器。
75.can收发器120可以包括耦合到收发器120的传输数据输入引脚105的检测器300。另外,检测器300可以耦合到发射器布置108和/或发射器111中的一个发射器(图3中仅示出一个发射器)。检测器300可以耦合到接收器布置115和/或接收器116中的一个接收器。检测器300可以被配置成检测模式变化信令。检测器300的输出可以用数种不同的方式引起传输模式的变化和/或接收模式的变化。举例来说,检测器300的输出可以被配置成使得发射器布置108中的不同组件连接到总线和/或接收器布置115中的不同组件连接到总线。可替换的是,或另外,可以将不同的偏置电压或功率电平施加到发射器布置108和/或接收器布置115的一个或多个组件,以提供根据第一性质和第二性质进行传输和接收的装置。
76.例如,检测器300可以包括计时器、计数器、滤波器、状态机、采样器和存储器中的至少一个。
77.检测器300可以被配置成检测串行位流内的模式切换信号,并且响应于所述检测,激活不同的第一传输模式和第二传输模式和/或第一接收模式和第二接收模式之间的切换。检测器300可以被配置成提供模式切换信号,所述模式切换信号例如叠加在传输数据的串行位流上或嵌入于所述串行位流中。检测器可以被配置成检测多个切换信号,所述切换信号以组合方式形成由控制器110或协议控制器114提供的模式切换信号。
78.在示例图3中,节点101的收发器120包括功率控制件302。功率控制件302可以被配置成将一个或多个不同的偏置电压或功率电平施加到发射器布置108和/或接收器布置115的一个或多个组件,以在第一传输模式和第二传输模式和/或第一接收模式和第二接收模式之间进行切换。
79.在例子中,检测器300耦合到接收器布置115、发射器布置108并且耦合到功率控制件302。在其它例子中,检测器300可以仅耦合到接收器布置115,仅耦合到发射器布置108或仅耦合到功率控制件302(或仅耦合到这三个组件中的两个组件)。
80.检测器300可以被配置成响应于切换信号而激活在发射器布置108、接收器布置115和功率控制件302中的至少一个的不同传输/接收模式之间的切换。
81.第一传输模式和第二传输模式和/或第一接收模式和第二接收模式之间的模式切换可能不是can收发器120提供的唯一功能。
82.连接到总线102的多个can节点101可以与端can节点处的终端阻抗127、128(参见图1)相距不同的距离。最远离终端阻抗127、128的can节点可能会引起can总线上的反射/振铃,这会降低总线可正确地操作的最大数据速率。举例来说can总线导线长度等其它因素还可能将数据速率限制为一定速度,所述速度低于反射将成问题的速度。然而,can总线协议,例如can fd的进步已将可能的数据速率增大到反射会负面地影响can总线网络的性能的程度。另外,应考虑即使在良好端接的网络的情况下,高电容总线负载也会负面地影响传输速率。在连接到can总线102的can节点101数量较多的情况下,显性到隐性的转变变得非常缓慢。除了电容性影响以外,导线124、126的阻抗还可能随温度变化,从而产生不匹配的总线终端,这又会引起反射,即使在can网络的端接端处也是如此。在隐性状态下,传输节点101是高阻的。当连接到总线102的每个节点将例如最大100pf的电容添加到can总线且can总线阻抗固定为60ω时,显性到隐性的转变不会快于大约100纳秒(在连接有十个节点的网络的情况下)。连接到can总线导线的can节点越多,总电容就越高且隐性位转变的耗时就越久。
对于复杂拓扑,达到所有节点处的可靠隐性位级的成功隐性位转变可能会耗费数百纳秒直到例如1微秒的时间,包括所有振铃效应。如果需要具有5兆比特/秒或更高的传输速率,那么位时间为200纳秒,这可能会短于位转变时间并且可能会引起通信故障。
83.在一个或多个例子中,can收发器120可以被配置成控制收发器102的输出阻抗。在一个或多个例子中,通过控制输出阻抗,可以控制信号反射、振铃和总线上任何其它不期望的信号伪影(artefact)。
84.图4示出了本公开的例子,所述例子提供用于减少/抑制信号反射/振铃的功能,所述功能可实施在can网络和can fd网络拓扑上以抑制信号干扰并提高信号质量。根据例子,可以基于来自控制器110的经由传输输出104提供并且由收发器120经由传输输入引脚105接收的激活信令而激活所述功能。因此,可以用与模式切换信令类似的方式,通过使用与传输数据相同的从传输数据输出104到传输数据输入105的路径由激活信令用信号发送功能。
85.收发器120被配置成检测串行位流内来自控制器110的激活信令并激活功能。收发器120可以被配置成检测激活信令,所述激活信令例如叠加在串行位流上或嵌入于串行位流中。激活信令可以包括一个或多个脉冲,但在一个或多个例子中,可以通过can装置的can收发器从显性状态到隐性状态的转变来提供激活信令。响应于检测到can收发器从显性状态到隐性状态的转变(这可基于在来自控制器的传输数据中检测到逻辑0到逻辑1的转变),当连接到can收发器的can总线上的差分驱动电压减小到预定义电压时,将can收发器的输出阻抗控制在显性状态下的阻抗值的预定义范围内。举例来说,当can总线上的差分驱动电压减小到预定义电压时,可将can收发器的输出阻抗控制在高于或低于显性状态下的阻抗值的某一百分比内(例如,显性状态下的阻抗值的
±
5%、
±
10%或在其它合适的值范围内)。可通过监测传输输入105处在can收发器处接收到的传输数据并识别传输数据信号的信号沿来检测can装置的can收发器从显性状态到隐性状态的转变。通过在差分驱动电压的斜降期间将can收发器的输出阻抗控制为低阻的(例如,控制为高于或低于显性状态下的阻抗值的某一百分比内),可减少耗散到can网络中的能量,从而使得can总线上的反射更少。can总线反射抑制技术独立于can总线拓扑和can总线数据速度,并可应用于各种can总线拓扑和can总线数据速度。
86.图4描绘了图2或图3中所描绘的can收发器120的发射器布置108的实施例。在图4的例子中,can收发器120包括阻抗电桥430和被配置成控制所述阻抗电桥的阻抗控制器432。通过(例如,基于从传输数据输入引脚105接收到的传输数据信号)控制can收发器120的阻抗电桥,可独立于can总线102处的信号响应而调整can收发器120的阻抗。因此,可以通过可控的阻抗来减少或抑制can总线处的信号反射/振铃。
87.在图4中所描绘的例子中,阻抗电桥430连接到canh端401和canl端402,canh端401和canl端402又耦合到总线102的总线导线124、126。阻抗电桥包括第一支脚426和第二支脚428,第一支脚426还被称作canh(侧)支脚,第二支脚428还被称作canl(侧)支脚。每个支脚包括具有阻抗性质的两个可控制阻抗(例如,可调整电容器、可调整电阻器和/或可调整电感器),所述阻抗性质可例如由阻抗控制器432动态调整。canh支脚包括推式阻抗单元410(例如,实施为推式电阻器r
push1
)和挽式阻抗单元415(例如,实施为挽式电阻器r
pull1
),推式阻抗单元410连接在共同电压供应轨v
cc 460与canh端401之间,挽式阻抗单元415连接在canh端401与共同接地轨465之间。canl支脚包括挽式阻抗单元425(例如,实施为挽式电阻
器r
pull2
)和推式阻抗单元420(例如,实施为推式电阻器r
push2
),挽式阻抗单元425连接在共同电压供应轨v
cc
与canl端402之间,推式阻抗单元420连接在canl端402与共同接地轨之间。虽然阻抗单元410、415、420、425在图4中示出的实施例中实施为电阻器,但在其它实施例中,阻抗单元410、415、420、425中的至少一个阻抗单元可实施为一个或多个晶体管(mosfet晶体管或双极晶体管)、一个或多个可调整电容器、一个或多个可调整电感器,或一个或多个可调整电阻器、一个或多个电容器和/或一个或多个可调整电感器的组合。在一些实施例中,推式电阻器r
push1
和r
push2
以及挽式电阻器r
pull1
和r
pull2
中的至少一个电阻器实施为电阻梯或其它可调整电阻网络,并且阻抗控制器432可(例如,通过控制电阻梯或其它可调整电阻网络内的开关(例如,mosfet晶体管或其它有源半导体装置)以连接或绕过电阻器组件)调整推式电阻器r
push1
和r
push2
以及挽式电阻器r
pull1
和r
pull2
中的至少一个电阻器的电阻值。支脚可具有关于canh端和canl端的对称电阻器配置。can总线404具有由等效总线阻抗r
bus
表示的负载阻抗,在480处示意性地示出。通常,根据上述典型标称电缆阻抗120ω,假设can总线在每一端处通过终端电阻r
term
=120ω封端,则总线阻抗r
bus
具有大约60ω的阻抗。在一些实施例中,二极管450、451、452、453可与阻抗单元410、415、420、425中的每一个阻抗单元串联连接,以便在共同电压供应轨上存在高于460处的供应电压电位v
cc
的总线电压或者共同接地轨465上存在低于接地电位(或其它参考电压)的总线电压的情况下,防止反向电流从can总线流入共同电压供应轨中并流入共同接地轨中。在一些实施例中,使用其它方案以防止反向电流从can总线102流入共同电压供应轨中并流入共同接地中,例如流入与共同供应轨460串联的二极管和与共同接地轨465串联的二极管中。
88.在一些实施例中,可调整推式电阻器r
push1
和r
push2
以及可调整挽式电阻器r
pull1
和r
pull2
的阻抗值可基于两个参数x和y而动态调整。参数x的域可以包括值范围x=(0,1),其中x=(0,1)={0<x<1},并且参数y的域可以包括值范围y=(0,2],其中y=(0,2]={0<y≤2}。参数x和y彼此独立。推式电阻器r
push1
和r
push2
的推式阻抗值z
push
可表达为:
[0089][0090]
其中rf表示参考电阻值。可调整挽式电阻器r
pull1
和r
pull2
的挽式阻抗值z
pull
可表达为:
[0091][0092]
阻抗电桥430的总差分阻抗,也是can收发器420的驱动阻抗z
can
,可表达为:
[0093][0094][0095]
阻抗电桥430的总差分阻抗,即can收发器420的驱动阻抗z
can
,可被动态地调整成
低阻状态与高阻状态之间的任何阻抗值,低阻状态在本文中由最低驱动阻抗值z
can
=r
f
确定,高阻状态在本文中由z
can
=∞表示。r
f
是can收发器420的最小驱动阻抗值。举例来说,最小驱动阻抗值可为r
f
=15ω。应注意,本文中由z
can
=∞指代的高阻状态可包括在数千欧或数兆欧(例如,至少1千欧或至少一兆欧)范围内的最大驱动阻抗值。相比于等效总线阻抗r
bus
,驱动阻抗z
can
需要为高阻的,以便允许差分总线阻抗在慢位时间结束时再次达到例如60欧姆的标称值。因此,最大驱动阻抗与最小驱动阻抗之间的倍数可在例如千或更大的范围内。
[0096]
阻抗控制器432可实施为处理器,例如微控制器。在一些实施例中,阻抗控制器包括信号沿检测器。在一些实施例中,阻抗控制器432被配置成检测can收发器120从显性状态到隐性状态的转变(激活信令的例子),并且响应于检测到can收发器从显性状态到隐性状态的转变,当连接到can收发器的can总线102上的差分驱动电压(例如,在canh端401与canl端402之间测得的不同电压)减小到预定义电压(例如,0v或其它合适的电压电平)时,将阻抗电桥的输出阻抗(例如,在canh端401与canl端402之间测得的阻抗)控制在高于或低于显性状态下的阻抗值的某一百分比内(例如,通过同时调整推式电阻器r
push1
和r
push2
以及挽式电阻器r
pull1
和r
pull2
的阻抗配置,使得当差分输出电压减小到预定义电压时,阻抗电桥430的输出阻抗在高于或低于显性状态下的阻抗值的某一百分比内)。举例来说,当can总线上的差分驱动电压减小到预定义电压时,可将can收发器的输出阻抗控制为显性状态下的阻抗值的
±
5%、
±
10%或在其它合适的值范围内。在一些实施例中,当差分输出电压减小预定义电压时,将can收发器的输出阻抗控制为固定阻抗。通过在差分驱动电压的斜降期间将can收发器的输出阻抗控制在高于或低于显性状态下的阻抗值的某一百分比内,在各种can总线拓扑和数据速度下,可减少耗散到can网络中的能量,从而使得can总线上的反射更少。
[0097]
有源can收发器(即,显性状态下的can收发器)将can总线波形驱动为“显性”状态,表示为传输信号的逻辑低电平(逻辑零)。无源can收发器(即,隐性状态下的can收发器)从can总线移除其差分输出电压,表示为传输信号的逻辑高电平(逻辑一)。虽然描述了传输信号的特定逻辑电平,但是在其它网络中,可使用其它信号逻辑电平。在一些实施例中,阻抗控制器432被配置成在连接到can收发器的can总线上的差分驱动电压减小到预定义电压时控制阻抗电桥的可调整推式电阻器r
push1
和r
push2
以及可调整挽式电阻器r
pull1
和r
pull2
的电阻值。在实施例中,在传输信号的正/上升或负/下降信号沿期间,阻抗控制器可以调整可调整推式电阻器r
push1
和r
push2
以及可调整挽式电阻器r
pull1
和r
pull2
中的一个或多个电阻器的电阻值。举例来说,在传输信号的显性(下降)沿期间,阻抗控制器432可以调整可调整推式电阻器r
push1
和r
push2
的电阻值,同时使可调整挽式电阻器r
pull1
和r
pull2
的电阻值保持静态高阻,在高于或低于显性状态下的阻抗值的某一百分比内。在另一例子中,在传输信号的隐性(上升)沿期间,阻抗控制器可利用不同斜率单独地调整可调整推式电阻器r
push1
和r
push2
以及可调整挽式电阻器r
pull1
和r
pull2
中的每一个电阻器的电阻值,以便使阻抗电桥的总体阻抗保持在高于或低于显性状态下的阻抗值的某一百分比内。
[0098]
在一些实施例中,阻抗控制器432被配置成当can总线404上的差分驱动电压(例如,在canh端401与canl端402之间测得的不同电压)保持在预定义电压下时增大can收发器420的输出阻抗(例如,在canh端401与canl端402之间测得的阻抗)。因为当can收发器的输出阻抗增大时can总线电压保持在预定义电压(例如,0v)下,所以阻抗变化不会使得大量能
量耗散到can网络中,并因此减少或防止can总线上的新反射。举例来说,推式电阻器r
push1
和r
push2
以及挽式电阻器r
pull1
和r
pull2
中的至少一个电阻器可实施为电阻梯或其它可调整电阻网络,并且阻抗控制器可(例如,通过控制电阻梯或其它可调整电阻网络内的开关以连接电阻器组件)增大推式电阻器r
push1
和r
push2
以及挽式电阻器r
pull1
和r
pull2
中的至少一个电阻器的电阻值。当can总线上的差分驱动电压保持在预定义电压下时,阻抗控制器423可将can收发器的输出阻抗增大到等于can总线的特性阻抗或等于接近can总线的特性阻抗的预定义阻抗值(例如,can总线的特性阻抗的
±
5%、
±
10%或在其它合适的值范围内)。在一些实施例中,在数据采样时间之前,阻抗控制器将can收发器的输出阻抗增大到等于can总线的特性阻抗或等于低于或高于can总线的特性阻抗的预定义阻抗值,以避免数据采样错误。在一些实施例中,当can总线上的差分驱动电压保持在预定义电压下时,阻抗控制器将can收发器的输出阻抗增大到等于can总线的特性阻抗,并且随后,当can总线上的差分驱动电压保持在预定义电压下时,将can收发器的输出阻抗从can总线的特性阻抗增大到高阻值。
[0099]
图5示出了图4中所描绘的can收发器120的示例信号时序图。在图5中示出的信号时序图中,阻抗电桥430的驱动阻抗“z
can”(例如,在canh端401与canl端402之间测得的阻抗)由阻抗控制器432控制,以在显性阻抗电平“r
dom”、有源隐性阻抗电平“r
actrec”与隐性阻抗电平“r
rec”之间切换。可基于can总线404的阻抗值而确定阻抗值r
dom
、r
actrec
和/或r
rec
。举例来说,如果can总线的阻抗是120欧姆,那么阻抗值r
dom
可设定成30欧姆,而阻抗值r
actrec
可设定成等于can总线的阻抗值,即120欧姆。阻抗值r
rec
可以设定成无限的(∞),可以包括最大驱动阻抗值,例如大于1千欧或大于1兆欧。
[0100]
在操作中,(图2中示出的)can节点101的can控制器110向can收发器120提供串行位流以用于在can总线上传输。阻抗控制器432可以监测激活信令的传输数据。在一个或多个例子中,阻抗控制器432监测传输输入105处的传输数据位流上的信号转变/沿,并相应地调整阻抗电桥的阻抗值。
[0101]
在时间点t0,105处的传输数据从低转变为高,这使得发射器布置提供can总线404上的差分电压v
can
(例如,在canh端401与canl端402之间测得的不同电压)的显性到隐性转变。将了解,txd路径251上的txd信号的从低到高转变可能不会立刻引起can总线电压v
can
的变化,这是因为当在输入105处接收到的传输信号转换成can总线的电压电平时,可能存在延迟。在显性状态下,阻抗控制器432控制推式电阻器r
push1
和r
push2
以保持在显性阻抗电平(例如,15ω)下,并控制挽式电阻器r
pull1
和r
pull2
以保持高阻,这会产生显性阻抗电平r
dom
(例如30ω)下的低阻驱动阻抗z
can
。
[0102]
响应于检测到时间点t0的显性到隐性转变(包括激活信号的例子),阻抗控制器432控制推式电阻器r
push1
和r
push2
以及挽式电阻器r
pull1
和r
pull2
,以将驱动阻抗z
can
控制为不变。举例来说,在时间点t0与时间点t1之间,当驱动阻抗z
can
保持恒定时,推式电阻器r
push1
和r
push2
以及挽式电阻器r
pull1
和r
pull2
中的每一个电阻器的电阻值变化,使得can总线电压v
can
从v
dom
斜变为零。阻抗控制器可使推式电阻器r
push1
和r
push2
的电阻值从一个值(例如,15欧姆)逐渐增大到更高的值(例如,30欧姆),同时使挽式电阻器r
pull1
和r
pull2
的电阻值从“无限”减小到某一值(30欧姆)。在时间点t1,当驱动阻抗z
can
保持恒定时,推式电阻器r
push1
和r
push2
以及挽式电阻器r
pull1
和r
pull2
的电阻值可以是对彼此可识别的。在时间点t1,can总线电压v
can
达到隐性状态(0v),并且在时间点t0,阻抗控制器将驱动阻抗z
can
控制为相比于驱
动阻抗z
can
的阻抗值不变。在can总线电压v
can
达到隐性状态(0v)之后,阻抗控制器将驱动阻抗z
can
控制为在另一持续时间内不变。通过将驱动阻抗z
can
控制为在can总线电压v
can
的斜降期间不变,可减少耗散到can网络中的能量,从而使得can总线102上的反射更少。
[0103]
在时间点t2,阻抗控制器432开始使驱动阻抗z
can
从低阻阻抗r
dom
增大到更高的值,直到时间点t3为止。举例来说,推式电阻器r
push1
和r
push2
以及挽式电阻器r
pull1
和r
pull2
中的至少一个电阻器可实施为电阻梯或其它可调整电阻网络,并且阻抗控制器可(例如,通过控制电阻梯或其它可调整电阻网络内的开关以连接电阻器组件)增大推式电阻器r
push1
和r
push2
以及挽式电阻器r
pull1
和r
pull2
中的至少一个电阻器的电阻值。在时间点t3,驱动阻抗z
can
达到有源隐性阻抗电平r
actrec
,可将所述阻抗电平调试成can网络电缆的特性阻抗(例如,120欧姆)或任何其它合适的值。因为当驱动阻抗z
can
增大时can总线电压v
can
保持在0v下,所以阻抗变化不会使得大量能量耗散到can网络中,并因此减少或防止can总线404上的新反射。对驱动阻抗z
can
的调整可随时间推移而持续执行,并可按恒定变化率增大。在一些实施例中,驱动阻抗z
can
的恒定变化率被设定成低于预定义值以逐渐增大驱动阻抗z
can
。阻抗控制器可通过控制推式电阻器r
push1
和r
push2
以及挽式电阻器r
pull1
和r
pull2
来调整驱动阻抗z
can
,以使所述电阻器的阻抗从起始推式阻抗(例如,z
can
=30ω)增大到目标推式阻抗(例如,z
can
=120ω)。在一些实施例中,阻抗控制器按恒定变化率随时间推移而持续增大推式电阻器r
push1
和r
push2
以及挽式电阻器r
pull1
和r
pull2
的阻抗。在一些实施例中,时间点t1与时间点t2之间的持续时间为零。
[0104]
抑制can总线102上的反射直至时间点t4。时间点t0与时间点t4之间的持续时间越长,振铃抑制性能就越好。在时间点t4,阻抗控制器432开始使驱动阻抗z
can
从有源隐性阻抗电平r
actrec
增大到更高的值,直到时间点t5为止。在时间点t5,驱动阻抗z
can
达到隐性阻抗电平r
rec
。在一些实施例中,倘若在时间点t4总线电压不为零,那么时间点t4与时间点t5之间的时间长于某一持续时间以减少或防止额外的能量耗散到can网络中。举例来说,如果另一发射器也例如在仲裁期间或在传输错误帧时将总线驱动为显性,那么在时间点t4,总线电压可以不为零。t4与t5之间的阈值时间持续时间取决于网络拓扑复杂度。
[0105]
将了解,可具有不同功能的can控制器与can收发器之间的后向兼容性很重要。可靠地将功能(即传输模式和接收模式切换功能和阻抗控制功能)的使用从控制器110用信号发送到收发器120也很重要。在一些例子中,后向兼容性与可靠地用信号发送收发器120的不同功能的使用之间可能存在冲突,尤其是在向模式切换信令和激活信令提供收发器的传输输入105处的传输数据时。
[0106]
将了解,可能已部署仅具有阻抗控制功能或模式切换功能中的一个的can收发器120,并且因此,当同时需要阻抗控制功能和模式切换功能时,没有机会修改激活信令或模式切换信令以避免冲突。
[0107]
在一个或多个例子中,可能需要可靠地将不同功能用信号发送到can收发器120,同时维持后向兼容性。
[0108]
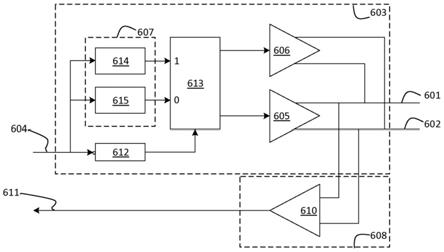
图6示出了根据本公开的can收发器。收发器600包括用于将所述收发器耦合到can总线102的两个总线端601、602。收发器包括被配置成基于在传输输入604处接收到的传输数据而经由所述总线端601、602在can总线102上传输信令的发射器布置603。传输输入包括用于耦合到can控制器(在先前的图式中示出为110)的端。发射器布置603包括被配置成基
于传输信号而将总线驱动为显性状态或隐性状态的至少一个发射器。在此例子和其它例子中,发射器布置603包括两个发射器605及606。第一发射器605可以被配置成将总线102驱动为显性状态,并且因此表示can总线上的传输数据的逻辑0。第二发射器606可以被配置成将总线102以及第一发射器605驱动为隐性状态,并且因此表示can总线上的传输数据的逻辑1。发射器605、606中的每一个发射器具有两个输出以将信令提供到两个端601、602。第一发射器可被称为推式发射器,因为其将总线导线之间不同的电位推到显性状态。第二发射器可被称为挽式发射器,因为其将总线导线之间不同的电位拉到隐性状态。
[0109]
发射器布置603另外包括连接到两个总线端的阻抗控制装置607。阻抗控制装置607被配置成通过控制发射器布置603在总线端601、602处的输出阻抗来控制收发器的输出阻抗。阻抗控制装置可以体现为控制块614、615以及第一发射器605和第二发射器606。布置可以采用图4中示出的阻抗电桥的形式。在此类实施例中,控制块607可以执行阻抗控制器432的功能。将了解,上文所描述的阻抗电桥的结构的变化在此实施例中是适用的。另外,将了解,可以提供除用于整体地控制的发射器布置603和收发器600的输出阻抗的图4的阻抗电桥之外的装置。综上所述,每个阻抗控制块614、615可控制第一发射器605和第二发射器606两者以控制收发器的输出阻抗,同时将所述显性信令和隐性信令应用于总线601、602。
[0110]
在示例图6中,收发器600包括耦合到所述两个总线端601、602并且被配置成从can总线接收信令的接收器布置608。接收器布置608可以包括被配置成基于所述can总线信令而产生接收到的数字数据信号的一个或多个接收器610。接收到的数据被提供到接收输出611,接收输出611用于耦合到can控制器110。
[0111]
收发器600包括信令检测器(612、613的组合),所述信令检测器被配置成检测来自控制器110的在传输输入604处与传输数据一起接收到的信令。信令检测器被配置成确定在传输数据从逻辑零状态转变为逻辑一状态之前传输数据包括所述逻辑零状态的时间长度。因此,在一个或多个例子中,信令检测器可以包括时间滤波器612以用于此目的。
[0112]
一般来说,收发器600被配置成:
[0113]
基于时间长度长于预定阈值,由阻抗控制装置根据(例如由第一控制块614提供的)第一输出阻抗控制方案提供对输出阻抗的控制;以及
[0114]
基于时间长度短于所述预定阈值,提供以下操作中的任一项:(1)根据(例如由第二控制块615提供的)不同于第一方案的第二输出阻抗控制方案控制所述输出阻抗;以及(2)阻抗控制装置不对输出阻抗进行有源控制(参见示例图7)。
[0115]
阻抗控制方案包括在发射器布置603将总线驱动为隐性状态时和之后随时间进行一次或多次输出阻抗变化和维持输出阻抗。
[0116]
参考图5,第一方案包括当can总线上的差分电压v
can
在时间段t0到t1内减小到示出为0伏的预定义电压时,将输出阻抗控制在显性状态下的阻抗值(r
dom
)的预定义范围内。因此,预定义电压包括将总线置于隐性状态下(根据can协议,低于0.5伏)的电压。然后,第一方案包括在示出为t1到t5的第一预定时间持续时间内增大输出阻抗。也就是说,第一预定时间持续时间包括在一旦总线达到隐性状态就开始的位时间500内达到由阻抗控制装置提供的最大输出阻抗所花费的时间。增大包括在t2到t3内首先增大到r
atrec
,并且在接下来的时段t3到t4内维持r
atrec
的时段之后,在接下来的时段t4到t5内其次增大到r
rec
。因此,综上所述,增大包括在隐性位时间500内通过基本上恒定的输出阻抗的时段分开的两次单独增大。
上文在图5的描述中更详细地描述此第一方案。
[0117]
在一个或多个例子中,基于在传输输入604处提供的信令以及传输数据而控制收发器功能是有利的,因为现有的引脚/端的重复使用使得不再需要硬件变化。然而,随着can收发器的功能增加并且越来越多的“功能激活”信号需要由can控制器用信号发送到收发器,在维持与可能已发行的功能的后向兼容性的同时用信号发送功能的激活/去激活变得更加困难。可能需要can控制器和can收发器(具有可用于其中的每一个的不同功能)彼此兼容,因为从can控制器到can收发器的信令应激活期望的功能而不是激活不希望的功能。
[0118]
使用逻辑零状态在传输数据转变之前的时间长度以在利用第一方案操作输出阻抗控制与不利用第一方案操作输出阻抗控制之间进行选择可为有利的。因此,仍然可以针对无法提供短于预定阈值的位时间的can控制器提供利用第一方案的输出阻抗控制。然而,可能希望使用更高波特率(并且因此确实能够提供短于预定阈值的位时间)并且可能不希望激活第一方案阻抗控制的can控制器可以有效地将这一点用信号发送到can收发器600。
[0119]
使用此方法使传输数据能够具有更高的波特率可为特别有利的,因为可将预定阈值时间选择为短于传统协议提供的最短位时间。因此,举例来说,can fd具有8mbps的最大波特率,这给出125纳秒的最短位时间。如果需要将高于can fd的最大波特率的波特率的使用从can控制器用信号发送到can收发器,那么使用少于125纳秒的预定阈值时间这样做可能是有利的,因为传统控制器不会提供位时间短于125纳秒的信令,并且新的功能可以可靠地用信号发送,同时维持后向兼容性。
[0120]
在一个或多个例子中,信令检测器可以由数字信号处理器提供,所述数字信号处理器被配置成确定在逻辑0到逻辑1的转变之前的位时间并相应地控制阻抗控制装置。然而,在此例子中,信令检测器包括时间滤波器612,所述时间滤波器612被配置成基于所述时间长度长于或短于预定阈值而提供切换信号,其中信令检测器另外包括多路复用器613,所述多路复用器613被配置成接收所述切换信号并基于所述切换信号而在以下状态之间切换:
[0121]
第一状态,在所述第一状态下,多路复用器被配置成连接第一控制块614以将信令提供到阻抗控制装置的其余部分以提供第一方案;以及
[0122]
第二状态,在所述第二状态下,多路复用器被配置成:连接第二控制块615以将信令提供到阻抗控制装置的其余部分以提供所述第二方案;或使第一控制块615与阻抗控制装置断开连接。
[0123]
因此,示例图6示出了第一控制块614或第二控制块615连接到阻抗控制装置以分别根据第一方案或第二方案提供控制的布置。图6示出了信令检测器612、613被配置成基于时间长度短于所述预定阈值而根据由控制块615提供的第二方案提供对所述输出阻抗的控制的实施例。
[0124]
示例图7基本上类似于图6并且已使用相同的标号。然而,在此例子中,不存在第二控制块615,并且因此,多路复用器613用以使第一控制块614与阻抗控制装置断开连接。然后,发射器布置603被配置成基于传输数据而将信令传输到总线,而阻抗控制装置不对阻抗进行有源控制。
[0125]
在一个或多个例子中,根据第一方案的阻抗控制可以由第二发射器606提供。因此,基于时间长度短于所述预定阈值,信令检测器612、613可以被配置成去激活第二发射器
606。
[0126]
已经关于图5描述了第一方案,然而,下文提供了概述。参考示例图5,第一方案包括在隐性位持续时间500内进行以下阻抗控制,所述隐性位持续时间500由从502处的传输数据中的逻辑0(其使得发射器布置将显性状态应用于总线)到604处的传输数据中的传输数据中的逻辑1(使得发射器布置将隐性状态应用于总线)的转变501开始。
[0127]
首先,当can总线上的差分电压在t0到t1之间的第一预定持续时间内减小到预定义电压时,将阻抗控制装置的输出阻抗控制在显性状态下的阻抗值r
dom
的预定义范围内。因此,当总线上的v
can
差分电压从v
dom
减小到0伏时,输出阻抗z
can
基本上维持在r
dom
下。预定义电压包括表示隐性状态的差分总线电压。紧接在can总线上的差分驱动电压在t1到t2之间已减小到预定义电压之后,可以将阻抗控制装置的输出阻抗控制在显性状态下的阻抗值r
dom
的预定义范围内。
[0128]
随后,当can总线上的差分电压v
can
在第一预定持续时间之后在t2到t3之间的第二预定持续时间内保持在预定义电压(例如,0v)下时,阻抗控制装置可以被配置成将输出阻抗增大到can总线的特性阻抗r
actrec
。
[0129]
随后,阻抗控制装置可以被配置成在第三预定持续时间t3到t4内将输出阻抗维持为can总线的特性阻抗。
[0130]
随后,阻抗控制装置可以被配置成当can总线上的差分电压在第三预定持续时间(t2到t3)之后的第四预定持续时间t4到t5内保持在预定义电压下时,将输出阻抗从can总线的特性阻抗r
actrec
增大到更高的欧姆值r
rec
。阻抗值r
rec
可以大于1千欧或大于1兆欧。
[0131]
将了解,第一控制块614可以将信令提供到阻抗电桥以将can收发器的输出阻抗控制在高于或低于显性状态下的阻抗值(上文所描述的其它阻抗值)的某一百分比内。
[0132]
图8中示出了图6的实施例的操作的例子。在此例子中,信令检测器检测801处的传输数据从逻辑零到逻辑一的转变。在801处的转变之前传输数据包括逻辑零状态的时间长度802短于此示例图中的所述预定阈值。因此,信令检测器将第二控制块615连接到阻抗控制块以提供第二方案。
[0133]
一般来说,第二方案包括当can总线上的差分电压减小到预定义电压时(在图8中的t0与t1之间),将输出阻抗控制在显性状态下的阻抗值的预定义范围内,然后在第二预定持续时间(图8中的t1到t2)内增大输出阻抗,所述第二预定时间持续时间短于在第一方案中增大输出阻抗的第一预定持续时间,在图5中示出为t2到t5。第二预定时间持续时间包括在位时间803内达到由阻抗控制装置提供的最大输出阻抗,即r
rec
,所花费的时间。
[0134]
更详细地说,第二方案可首先包括当can总线上的差分电压在图8中示出为t0到t1的第一预定持续时间内减小到预定义电压时,将阻抗控制装置的输出阻抗控制在显性状态下的阻抗值的预定义范围内。
[0135]
第二方案可以随后包括当can总线上的差分电压在第一预定持续时间之后的图8中的第二预定持续时间(t1到t2)内保持在预定义电压下时,将阻抗控制装置的输出阻抗直接增大到高阻抗r
rec
,所述高阻抗r
rec
包括高于can总线的特性阻抗r
actrec
的阻抗,并且在隐性位持续时间的至少其余部分或全部持续时间内,即在时间t2之后,维持高阻抗。将了解,为了清楚起见,图8的隐性状态的长度可示出为长于单个位时间。
[0136]
图9中示出了图7的实施例的操作的例子。在此例子中,信令检测器检测901处的传
输数据从逻辑零到逻辑一的转变。在901处的转变之前传输数据包括逻辑零状态的时间长度902短于此示例图中的所述预定阈值。在此例子中,不存在阻抗控制装置对输出阻抗的控制,并且因此,发射器布置使得can总线v
can
上的差分电压在t0到t1之间的第一预定持续时间内减小到预定义电压(表示隐性状态)。输出阻抗z
can
在同一时段期间增大到高值r
rec
。
[0137]
将了解,第二方案可以由控制图5的阻抗电桥的第二控制块提供。如上文所解释,阻抗电桥可以包括两个支脚,并且其中两个支脚中的每一个支脚包括串联连接在电压供应轨与接地轨之间且连接到两个can总线端中的相应一个can总线端的可调整挽式电阻器和可调整推式电阻器。第二控制块615(在先前例子中,以及第一控制块614)可以提供用于控制可调整电阻器的值的信号以提供输出阻抗。
[0138]
在另一例子中,信令检测器被配置成确定在传输数据从逻辑零状态转变为逻辑一状态之前传输数据包括所述逻辑零状态的时间长度,并且可以被配置成激活其它功能。
[0139]
因此,发射器布置可以被配置成在第一传输模式或第二传输模式中的任何时间操作,其中在第一传输模式中,发射器布置被配置成利用第一性质传输所述信令,并且当发射器布置处于第二传输模式中时,发射器布置被配置成利用不同于第一性质的第二性质传输所述信令;其中
[0140]
基于由信令检测器确定的时间长度长于预定阈值,所述发射器布置被配置成在第一传输模式中操作;以及
[0141]
基于由信令检测器确定的时间长度短于预定阈值,发射器布置被配置成在第二传输模式中操作。
[0142]
在此例子中,第一性质和第二性质包括:
[0143]
分别包括用于传输所述信令的第一波特率和用于传输所述信令的第二波特率,其中第二波特率大于第一波特率;以及
[0144]
分别包括用于表示施加到can总线的信令中的逻辑一和逻辑零的第一电压电平方案和用于表示施加到can总线的信令中的逻辑一和逻辑零的第二电压电平方案,其中第一电压电平方案的电压电平不同于第二电压电平方案的电压电平。
[0145]
在一个或多个例子中,第一波特率和第一电压电平方案可以遵循can或can fd协议。在一个或多个例子中,第二波特率可以大于由can fd协议指定的最大值。
[0146]
关于上图1
‑
3详细地描述了第一传输模式与第二传输模式以及第一接收模式与第二接收模式之间的切换。
[0147]
在一个或多个例子中,控制器局域网can控制器可以与can收发器600组合提供。can控制器包括传输输出节点和接收输入,所述传输输出节点被配置成将传输数据提供到can收发器以用于在can总线上传输,所述接收输入被配置成从can收发器接收接收到的数据,所述数据表示从can总线接收到的信令。例如微控制器110或协议控制器114的一部分的控制器还可以包括功能选择器,所述功能选择器被配置成向模式信号提供传输数据,所述模式信号指示can收发器在第二传输模式而不是第一传输模式中操作并根据第一方案停用阻抗控制装置的操作,其中模式信号包括控制器被配置成提供传输数据,在传输数据从逻辑零状态转变为逻辑一状态之前,所述传输数据包括所述逻辑零状态的时间长度小于预定阈值。
[0148]
can控制器可以被配置成当收发器处于第二传输模式中时在第二波特率下提供传
输数据,所述第二波特率大于当收发器处于第一传输模式中时使用的第一波特率。在一个或多个例子中,第二波特率使得第二波特率的位时间小于由信令检测器使用的预定阈值。然而,在其它例子中,第二波特率的位时间等于或大于由信令检测器使用的预定阈值。
[0149]
can控制器可以被配置成当未提供模式信号时在第一波特率下提供传输数据,其中第一波特率使得第一波特率的位时间大于预定阈值,由此根据第一方案提供阻抗控制装置的操作。
[0150]
图10示出了用于操作控制器局域网can收发器的示例方法,can收发器包括用于将所述收发器耦合到can总线的两个总线端601、602和被配置成基于在传输输入604处接收到的传输数据而经由所述总线端在can总线上传输信令的发射器布置603,传输输入604包括用于耦合到can控制器的端,发射器布置包括被配置成基于传输信号而将总线驱动为显性状态或隐性状态的至少一个发射器,并且包括连接到两个总线端的阻抗控制装置;所述方法包括:
[0151]
使用信令检测器,检测1001来自控制器的在传输输入处与传输数据一起接收到的信令;
[0152]
确定1002在传输数据从逻辑零状态转变为逻辑一状态之前传输数据包括所述逻辑零状态的时间长度,并且:
[0153]
基于时间长度长于预定阈值,由阻抗控制装置根据第一方案提供1003对输出阻抗的控制,包括当连接到can收发器的can总线上的差分驱动电压减小到预定义电压时,将输出阻抗控制在显性状态下的阻抗值的预定义范围内,然后在第一预定时间持续时间内增大输出阻抗;以及
[0154]
基于时间长度短于所述预定阈值,提供1004以下操作中的一项:根据不同于第一方案的第二方案控制所述输出阻抗;以及阻抗控制装置不控制输出阻抗。
[0155]
除非明确陈述特定次序,否则可以任何次序执行上图中的指令和/或流程图步骤。而且,本领域的技术人员将认识到,虽然已论述了一个示例指令集/方法,但是在本说明书中的材料可以多种方式组合从而还产生其它例子,并且应在此详细描述提供的上下文内来进行理解。
[0156]
在一些示例实施例中,上文描述的指令集/方法步骤实施为体现为可执行指令集的功能和软件指令,所述可执行指令集在计算机或以所述可执行指令编程并控制的机器上实现。此类指令经过加载以在处理器(例如,一个或多个cpu)上执行。术语处理器包括微处理器、微控制器、处理器模块或子系统(包括一个或多个微处理器或微控制器),或其它控制或计算装置。处理器可指代单个组件或多个组件。
[0157]
在其它例子中,本文中示出的指令集/方法以及与其相关联的数据和指令存储在相应存储装置中,所述存储装置被实施为一个或多个非瞬态机器或计算机可读或计算机可用存储介质。这类计算机可读或计算机可用存储介质被视为物品(或制品)的部分。物品或制品可以指任何所制造出的单个组件或多个组件。如本文所限定的非瞬态机器或计算机可用介质不包括信号,但此类介质可能能够接收并处理来自信号和/或其它瞬态介质的信息。
[0158]
本说明书中论述的材料的示例实施例可整体或部分地经由网络、计算机或基于数据的装置和/或服务加以实施。这些网络、计算机或基于数据的装置和/或服务可包括云、因特网、内联网、移动装置、台式电脑、处理器、查找表、微控制器、消费者设备、基础架构,或其
它使能装置和服务。如本文和权利要求书中可使用,提供以下非排他性定义。
[0159]
在一个例子中,本文论述的一个或多个指令或步骤是自动化的。术语自动化或自动地(和其类似变型)意指使用计算机和/或机械/电气装置对设备、系统和/或过程进行的受控操作,而不需要人类干预、观测、努力和/或决策。
[0160]
应了解,据称将耦合的任何组件可直接地或间接地耦合或连接。在间接耦合的情况下,可在称为耦合的两个组件之间安置额外的组件。
[0161]
在本说明书中,已经按选定的细节集合来呈现示例实施例。然而,本领域的技术人员将理解,可以实践包括这些细节的不同选定集合的许多其它示例实施例。希望所附权利要求书涵盖所有可能的示例实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。