1.本发明涉及抢险设备技术领域,尤其是涉及一种排涝机器人控制系统。
背景技术:
2.排涝机器人在救灾抢险方面能够发挥重要的作用。目前的排涝机器人,只具备简单的移动及排水功能,功能单一,控制策略不够智能,而由于排水车经常需要在复杂的地域环境下作业,因此,现有的排涝机器人的可靠性和灵活性较低,无法满足在抢险救灾时对排涝机器人的性能需求。
技术实现要素:
3.本发明实施例所要解决的技术问题在于,提供一种排涝机器人控制系统,能够有效提高排涝机器人的可靠性和灵活性,从而满足在抢险救灾时对排涝机器人的性能需求。
4.为了解决上述技术问题,本发明实施例提供了一种排涝机器人控制系统,包括无线遥控器和设于排涝机器人上的信号收发器、机载控制器及压力传感器;所述信号收发器、所述压力传感器分别与所述机载控制器电连接,所述无线遥控器与所述信号收发器无线通信连接;
5.所述信号收发器用于将所述无线遥控器发送的控制指令转发至所述机载控制器,以及用于将所述机载控制器采集的设备信息反馈至所述无线遥控器;
6.所述机载控制器用于将所述压力传感器采集的传感信息处理为电信号后通过所述信号收发器发送至所述无线遥控器,以使所述无线遥控器根据所述电信号解析为涉水深度信息并显示。
7.进一步地,所述的排涝机器人控制系统还包括设于所述排涝机器人上的水位电极器,所述水位电极器与所述机载控制器电连接,所述机载控制器还用于当根据所述水位电极器传输的水位信号判断所述排涝机器人当前涉水深度超过预设阈值时,控制前进电磁阀断开,以确保所述排涝机器人不能前进。
8.进一步地,所述的排涝机器人控制系统还包括设于所述排涝机器人的油箱上的油量传感器,所述油量传感器与所述机载控制器电连接,所述机载控制器还用于将所述油量传感器采集的传感信息处理为油量电信号后通过所述信号收发器发送至所述无线遥控器,以使所述无线遥控器根据所述油量电信号解析为油量信息并显示。
9.进一步地,所述无线遥控器还包括缺油提示单元,所述缺油提示单元用于当根据所述油量信息判断所述排涝机器人的燃油低于预设油量阈值时,发出燃油量过低告警信号。
10.进一步地,所述无线遥控器包括发动机启动单元,所述发动机启动单元用于获取自复位开关触发的启动信号并通过所述信号收发器转发至所述机载控制器,以使所述机载控制器通过小继电器触发启动马达进行启动,从而驱动发动机启动。
11.进一步地,所述无线遥控器还包括行走遥控单元,所述行走遥控单元用于获取自
复位遥杆触发的控制信号并通过所述信号收发器转发至所述机载控制器,以使所述机载控制器根据所述控制信号对所述排涝机器人进行速度控制及转向控制。
12.进一步地,所述无线遥控器还包括抽水控制单元,所述抽水控制单元用于获取自锁开关触发的抽水启停信号并通过所述信号收发器转发至所述机载控制器,以使所述机载控制器根据所述抽水启停信号对所述排涝机器人的抽水泵进行启停控制。
13.进一步地,所述无线遥控器还包括油门控制单元,所述油门控制单元用于获取自锁多档位电位器开关触发的档位信号并通过所述信号收发器转发至所述机载控制器,以使所述机载控制器根据所述档位信号对所述排涝机器人的油门执行器进行油门控制。
14.进一步地,所述无线遥控器还包括发动机风门控制单元,所述发动机风门控制单元用于获取风门自锁开关触发的开关信号并通过所述信号收发器转发至所述机载控制器,以使所述机载控制器根据所述开关信号对所述排涝机器人的风门执行器进行风门开关控制。
15.与现有技术相比,本发明具有如下有益效果:
16.本发明提供了一种排涝机器人控制系统,包括无线遥控器和设于排涝机器人上的信号收发器、机载控制器及压力传感器;所述信号收发器、所述压力传感器分别与所述机载控制器电连接,所述无线遥控器与所述信号收发器无线通信连接;所述信号收发器用于将所述无线遥控器发送的控制指令转发至所述机载控制器,以及用于将所述机载控制器采集的设备信息反馈至所述无线遥控器;所述机载控制器用于将所述压力传感器采集的传感信息处理为电信号后通过所述信号收发器发送至所述无线遥控器,以使所述无线遥控器根据所述电信号解析为涉水深度信息并显示。本发明的排涝机器人控制系统能够有效提高排涝机器人的可靠性和灵活性,从而满足在抢险救灾时对排涝机器人的性能需求。
附图说明
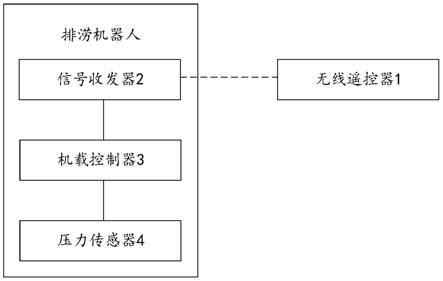
17.图1是本发明一实施例提供的排涝机器人控制系统的结构示意图。
具体实施方式
18.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.请参见图1,本发明实施例提供了一种排涝机器人控制系统,包括无线遥控器1和设于排涝机器人上的信号收发器2、机载控制器3及压力传感器4;所述信号收发器2、所述压力传感器4分别与所述机载控制器3电连接,所述无线遥控器1与所述信号收发器2无线通信连接;
20.所述信号收发器2用于将所述无线遥控器1发送的控制指令转发至所述机载控制器3,以及用于将所述机载控制器3采集的设备信息反馈至所述无线遥控器1;
21.所述机载控制器3用于将所述压力传感器4采集的传感信息处理为电信号后通过所述信号收发器2发送至所述无线遥控器1,以使所述无线遥控器1根据所述电信号解析为涉水深度信息并显示。
22.在本发明实施例中,排涝机器人控制系统主要由无线遥控器1、信号收发器2、机载控制器3、pcb接线板、比例放大板、以及其它电子元器件组成。其中无线遥控器1的主要作用为通过远程遥控控制机器人各种动作,同时接收排涝机器人的工作状态信息(燃油量、涉水深度等)等远程实时监控设备工作状态。
23.信号收发器2的主要作用为接收无线遥控器1的信号然后把信息反馈到机载控制器3,以及发射机器人的设备信息给无线遥控器1。
24.机载控制器3的主要作用为通过信号收发器2传递的信号来输出控制pcb接线板继电器的动作,实现设备不同功能的运转。
25.pcb接线板的主要作用为集成控制模块的线路,通过继电器连接不同的电子元器件实现设备不同的功能。
26.比例放大板的作用为通过接收机载控制器3发射的信号放大该信号然后控制行走马达的比例控制阀上的电流大小,实现对设备无极调速及转向等功能。
27.需要说明的是,本发明实施例的排涝机器人具有远距离水位实时观测功能:通过在排涝机器人底部设计一个压力传感器4,压力传感器4读取信息后传递到机载控制器3,机载控制器3把压力信息转换为电信号通过无线发射器发射给无线遥控器1。无线遥控器1读取电信号后在处理为压力信息,在经过程序设计的公式把水深信息在显示屏上体现出来。
28.进一步地,所述的排涝机器人控制系统还包括设于所述排涝机器人上的水位电极器,所述水位电极器与所述机载控制器3电连接,所述机载控制器3还用于当根据所述水位电极器传输的水位信号判断所述排涝机器人当前涉水深度超过预设阈值时,控制前进电磁阀断开,以确保所述排涝机器人不能前进。
29.在本发明实施例中,通过在设备合适的位置设计水位电极器,当水位达到水位电极器的高度时候,水位电极器连接的继电器线圈通电,闭合触点,常闭的前进电磁阀的线路断开,使得设备不能再往前走。
30.进一步地,所述的排涝机器人控制系统还包括设于所述排涝机器人的油箱上的油量传感器,所述油量传感器与所述机载控制器3电连接,所述机载控制器3还用于将所述油量传感器采集的传感信息处理为油量电信号后通过所述信号收发器2发送至所述无线遥控器1,以使所述无线遥控器1根据所述油量电信号解析为油量信息并显示。
31.进一步地,所述无线遥控器1还包括缺油提示单元,所述缺油提示单元用于当根据所述油量信息判断所述排涝机器人的燃油低于预设油量阈值时,发出燃油量过低告警信号。
32.在本发明实施例中,通过在油箱上设计油量传感器,油量传感器把信息经过机载控制器3处理成电信号发射到无线遥控器1上,无线遥控器1上把电信号转换为压力信息。进一步地,在经过计算得出当前油箱的油量如果油量过低,无线遥控器1会在显示屏上提示显示添加燃油。
33.进一步地,所述无线遥控器1包括发动机启动单元,所述发动机启动单元用于获取自复位开关触发的启动信号并通过所述信号收发器2转发至所述机载控制器3,以使所述机载控制器3通过小继电器触发启动马达进行启动,从而驱动发动机启动。
34.在本发明实施例中,通过在无线遥控器1上设计自复位开关,开关打开,信号收发器2接收到信号后反馈给机载控制器3,机载控制器3给出一个高电平信号到启动线连接的
小继电器上,小继电器得电触点闭合,启动电磁阀线圈得电吸合启动马达的正极线。电瓶的直流电与启动马达线圈形成闭合状态,马达得电启动起来从而驱动发动机启动。
35.进一步地,所述无线遥控器1还包括行走遥控单元,所述行走遥控单元用于获取自复位遥杆触发的控制信号并通过所述信号收发器2转发至所述机载控制器3,以使所述机载控制器3根据所述控制信号对所述排涝机器人进行速度控制及转向控制。
36.在本发明实施例中,通过在无线遥控器1上设计自复位遥杆开关,当控制遥杆往不同方向控制时,信号收发器2接收到信号然后反馈给控制模块,控制模块根据接收的信号输出电流给比例放大板。电流经过比例放大板后,放大电流然后控制液压马达上的比例控制阀,实现设备的无级调速及前进转弯后退等行走功能。
37.进一步地,所述无线遥控器1还包括抽水控制单元,所述抽水控制单元用于获取自锁开关触发的抽水启停信号并通过所述信号收发器2转发至所述机载控制器3,以使所述机载控制器3根据所述抽水启停信号对所述排涝机器人的抽水泵进行启停控制。
38.在本发明实施例中,通过在无线遥控器1上设计自锁开关,当开关拨到抽水位置后,信号收发器2接收信号反馈给机载控制器3,机载控制器3输出高电平,控制液压油路的继电器闭合,电磁阀闭合,实现液压油的合流然后油路往水泵走实现水泵工作状态,当无线遥控器1上开关关闭信号收发器2接收信号后反馈到机载控制器3,控制水泵流量的所有继电器线圈失电,电磁阀断开,设备停止抽水。
39.进一步地,所述无线遥控器1还包括油门控制单元,所述油门控制单元用于获取自锁多档位电位器开关触发的档位信号并通过所述信号收发器2转发至所述机载控制器3,以使所述机载控制器3根据所述档位信号对所述排涝机器人的油门执行器进行油门控制。
40.在本发明实施例中,通过在无线控制上设计自锁多档位电位器开关,当把开关拨到不同位置时候,把电信号传递到信号收发器2上,信号收发器2反馈到机载控制器3,机载控制器3根据接收的信号从而控制输出到油门执行器上的电压,根据电压的不同从而实现油门执行器的行程。油门执行器拉线连接油门开关从而实现控制油门的大小。
41.进一步地,所述无线遥控器1还包括发动机风门控制单元,所述发动机风门控制单元用于获取风门自锁开关触发的开关信号并通过所述信号收发器2转发至所述机载控制器3,以使所述机载控制器3根据所述开关信号对所述排涝机器人的风门执行器进行风门开关控制。
42.在本发明实施例中,通过在无线控制上设计风门自锁开关,当风门自锁开关拨到打开位置,信号收发器2接收信号后反馈到机载控制器3,机载控制器3输出高电平信号给风门连接的继电器,继电器线圈闭合,风门执行器工作。
43.与现有技术相比,本发明的排涝机器人控制系统能够有效提高排涝机器人的可靠性和灵活性,从而满足在抢险救灾时对排涝机器人的性能需求。
44.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。