技术特征:
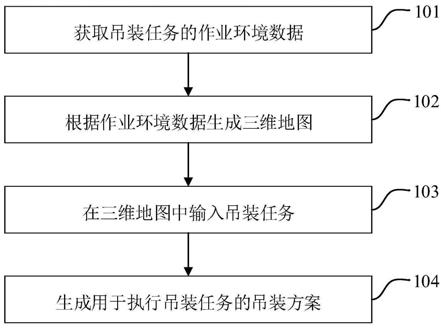
1.一种用于生成吊装方案的方法,其特征在于,包括:获取吊装任务的作业环境数据;根据所述作业环境数据生成三维地图;在所述三维地图中输入所述吊装任务;生成用于执行所述吊装任务的吊装方案。2.根据权利要求1所述的方法,其特征在于,所述根据所述作业环境数据生成三维地图包括:根据所述作业环境数据生成三维点云地图;将所述三维点云地图变换成矢量化的三维模型;所述在所述三维地图中输入所述吊装任务包括:在所述矢量化的三维模型中输入所述吊装任务。3.根据权利要求2所述的方法,其特征在于,所述输入所述吊装任务包括:确定被吊物体;输入所述被吊物体的属性,所述属性包括重量和材质中的至少一者;输入所述被吊物体的起始位置和目标位置。4.根据权利要求2所述的方法,其特征在于,所述生成用于执行所述吊装任务的吊装方案包括:根据所述矢量化的三维模型、所述吊装任务和预先存储的起重机的模型数据,确定所述起重机的型号、站位点和工况,其中,所述起重机的模型数据包括所述起重机的动力学特性数据和起重量表;生成所述被吊物体的三维空间路径。5.根据权利要求2所述的方法,其特征在于,还包括:在所述生成用于执行所述吊装任务的吊装方案之前,修正所述矢量化的三维模型中实体的尺寸和位置;补充所述矢量化的三维模型的物理属性,所述物理属性包括:高压线的电压、强磁场范围和土地的松软程度的至少一种。6.根据权利要求2所述的方法,其特征在于,所述获取吊装任务的作业环境数据包括:对所述作业环境进行扫描以获取点云数据和视频数据;对所述点云数据和所述视频数据进行解析,转换成第一数据格式;所述根据所述作业环境数据生成三维点云地图包括:根据所述第一数据格式,生成三维点云地图。7.根据权利要求6所述的方法,其特征在于,还包括:保存所述点云数据、所述视频数据和所述矢量化的三维模型;接收查询请求;响应所述查询请求,展示所述点云数据、所述视频数据和所述矢量化的三维模型。8.根据权利要求2所述的方法,其特征在于,所述生成用于执行所述吊装任务的吊装方案包括:生成至少两个吊装方案;接收用户选择;
根据所述用户选择来确定所述至少两个吊装方案中的其中一个所述吊装方案,并打印所述吊装方案。9.一种处理器,其特征在于,被配置成执行根据权利要求1至8中任一项所述的用于生成吊装方案的方法。10.一种用于生成吊装方案的工程装置,其特征在于,包括:感知设备,用于获取吊装任务的作业环境数据,所述感知设备包括激光雷达;以及根据权利要求9所述的处理器。11.根据权利要求10所述的工程装置,其特征在于,所述感知设备还包括惯性传感器和相机中的至少一者。12.根据权利要求10所述的工程装置,其特征在于,还包括:人机交互设备,用于接收查询请求以及接收用户选择。
技术总结
本发明涉及工程机械领域,公开了一种用于生成吊装方案的方法、处理器和工程装置。用于生成吊装方案的方法包括:获取吊装任务的作业环境数据;根据所述作业环境数据生成三维地图;在所述三维地图中输入所述吊装任务;生成用于执行所述吊装任务的吊装方案。利用感知设备对吊装任务的作业环境进行扫描,而后自动得到关于作业环境的三维地图,在三维地图中输入吊装任务,可以自动生成用于执行吊装任务的吊装方案来供工程人员选择,节省了人力资源,提高了工作效率和作业的准确性。高了工作效率和作业的准确性。高了工作效率和作业的准确性。
技术研发人员:宋宝泉 谭松涛 郭纪梅 黄跃峰
受保护的技术使用者:中联重科股份有限公司
技术研发日:2021.07.21
技术公布日:2021/11/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。