1.本发明涉及永磁同步电机控制技术领域,尤其涉及一种基于二阶自抗扰控制的永磁同步电机控制方法及系统。
背景技术:
2.永磁同步电机(permanent magnet synchronous motor,pmsm)具有结构简单、可靠性高、功率因数大、能源利用率高、机械特性较硬、调速范围宽等特点,因此永磁同步电机被广泛应用于航空航天、汽车、数控机床、机器人等领域。
3.现有的扫描驱动机构,包含永磁同步电机和电机驱动控制系统。其中,电机驱动控制系统通常包含电流环、位置环和速度环。传统自抗扰控制器中的速度环为一阶速度自抗扰控制器,电流环仍为传统的pi控制器。这样的自抗扰控制器使得q轴电流环的pi控制器对设计参数敏感,抗扰能力弱且一阶自抗扰速度控制器中的跟踪微分器作用不明显,造成控制器的鲁棒性差和抗扰能力弱的问题。
技术实现要素:
4.鉴于上述的分析,本发明实施例旨在提供一种基于二阶自抗扰控制的永磁同步电机控制方法及系统,用以解决传统的自抗扰控制器存在的鲁棒性差和抗扰能力弱的问题。
5.一方面,本发明实施例提供了一种基于二阶自抗扰控制的永磁同步电机控制方法,包括如下步骤:
6.基于建立的永磁同步电机d-q轴数学模型得到状态方程;
7.根据所述状态方程,建立二阶自抗扰控制器;
8.基于模型参考自适应观测器得到估计的永磁同步电机的转速ω
r
;
9.将所述永磁同步电机的转速ω
r
和速度给定值ω
r*
同时输入所述二阶自抗扰控制器,得到q轴电压预测值u
q
;
10.基于所述q轴电压预测值u
q
和d轴电压预测值u
d
得到pwm控制信号并输入至与永磁同步电机连接的逆变器,以实现对永磁同步电机的驱动控制。
11.进一步,所述二阶自抗扰控制器包括跟踪微分器模型、非线性扩张状态观测器模型和非线性状态误差反馈模型;所述二阶自抗扰控制器用于观测永磁同步电机的扰动并进行扰动补偿控制,得到永磁同步电机的q轴电压预测值u
q
,具体包括如下步骤:
12.利用跟踪微分器模型获得速度的跟踪信号v1和速度微分的跟踪信号v2;
13.利用非线性扩张状态观测器模型获得非线性扩张状态观测器的观测估计值z1和z2;
14.所述速度的跟踪信号v1与速度的观测估计值z1作差得到误差信号e1,所述速度微分的跟踪信号v2与速度微分的观测估计值z2作差得到误差微分信号e2;
15.基于得到的误差信号e1及误差微分信号e2,利用非线性状态误差反馈模型得到q轴电压预测值u
q
。
16.进一步,所述跟踪微分器模型的表达公式为:
[0017][0018]
式中,v1为速度的跟踪信号,v2为速度微分的跟踪信号,分别为v1、v2的微分值,r为决定跟踪快慢的参数,ω
r*
为速度给定值,sign()为符号函数。
[0019]
进一步,所述非线性扩张状态观测器模型的表达式为:
[0020][0021]
式中,z1为速度的观测估计值,z2为速度微分的观测估计值,z3为外界扰动总和的观测估计值,β
01
,β
02
,β
03
为大于零的观测器增益系数,为大于零的观测器增益系数,分别为z1,z2,z3对应的微分值,ω
r
为永磁同步电机的转速,e为观测误差,b为增益补偿,u
q
为永磁同步电机q轴电压,非线性函数fal(e,α,δ)的表达式为:
[0022][0023]
式中,α
m
和δ
n
均为非线性函数fal(e,α,δ)的参数,其中m,n均取1,2,3,4,5。
[0024]
进一步,所述非线性状态误差反馈模型的表达式为:
[0025][0026]
式中,β
11
和β
12
均为输出误差校正增益,e1为误差信号,e2为误差微分信号,u0为误差信号与误差微分信号的非线性组合。
[0027]
另一方面,本发明实施例提供了一种基于二阶自抗扰控制的永磁同步电机控制系统,包括:
[0028]
数学模型获得模块,用于根据建立的永磁同步电机d-q轴数学模型得到状态方程;
[0029]
二阶自抗扰控制器获得模块,用于根据所述状态方程,建立二阶自抗扰控制器,其中,所述二阶自抗扰控制器用于观测永磁同步电机的扰动并进行扰动补偿控制,得到永磁同步电机的q轴电压预测值u
q
;
[0030]
模型参考自适应观测器获得模块,用于根据模型参考自适应观测器得到估计的永磁同步电机的转速ω
r
;
[0031]
电压预测值获得模块,用于将所述永磁同步电机的转速ω
r
和速度给定值ω
r*
同时
输入二阶自抗扰控制器,得到q轴电压预测值u
q
;以及,将永磁同步电机d轴电流值与d轴电流的参考值作差得到的结果输入pi控制器得到d轴电压预测值u
d
;
[0032]
驱动控制实现模块,用于根据所述q轴电压预测值u
q
和d轴电压预测值u
d
得到pwm控制信号并输入至与永磁同步电机连接的逆变器,以实现对永磁同步电机的驱动控制。
[0033]
进一步,所述二阶自抗扰控制器获得模块包括跟踪微分器获得单元、非线性扩张状态观测器获得单元和非线性状态误差反馈获得单元;所述二阶自抗扰控制器用于观测永磁同步电机的扰动并进行扰动补偿控制,得到永磁同步电机的q轴电压预测值u
q
,具体包括:
[0034]
跟踪微分器获得单元,用于根据跟踪微分器模型获得速度的跟踪信号v1和速度微分的跟踪信号v2;
[0035]
非线性扩张状态观测器获得单元,用于根据非线性扩张状态观测器模型获得速度的观测估计值z1和速度微分的观测估计值z2;
[0036]
所述速度的跟踪信号v1与速度的观测估计值z1作差得到误差信号e1,所述速度微分的跟踪信号v2与速度微分的观测估计值z2作差得到误差微分信号e2;
[0037]
非线性状态误差反馈获得单元,用于根据非线性状态误差反馈模型得到q轴电压预测值u
q
。
[0038]
进一步,所述跟踪微分器获得单元通过下式获得跟踪微分器模型:
[0039][0040]
式中,v1为速度的跟踪信号,v2为速度微分的跟踪信号,分别为v1、v2的微分值,r为决定跟踪快慢的参数,ω
r*
为速度给定值,sign()为符号函数。
[0041]
进一步,非线性扩张状态观测器获得单元通过下式获得非线性扩张状态观测器模型:
[0042][0043]
式中,z1为速度的观测估计值,z2为速度微分的观测估计值,z3为外界扰动总和的观测估计值,β
01
,β
02
,β
03
为大于零的观测器增益系数,为大于零的观测器增益系数,分别为非线性扩张状态观测器输出的观测估计值,ω
r
为永磁同步电机的转速,e为观测误差,b为增益补偿,u
q
为永磁同步电机q轴电压,非线性函数fal(e,α,δ)的表达式为:
[0044][0045]
式中,α
m
和δ
n
均为非线性函数fal(e,α,δ)的参数,其中m,n均取1,2,3,4,5。
[0046]
进一步,所述非线性状态误差反馈获得单元通过下式获得非线性状态误差反馈模型:
[0047][0048]
式中,β
11
和β
12
均为输出误差校正增益,e1为误差信号,e2为误差微分信号,u0为误差信号与误差微分信号的非线性组合。
[0049]
与现有技术相比,本发明至少可实现如下有益效果之一:
[0050]
1、一种基于二阶自抗扰控制的永磁同步电机控制方法,根据建立二阶自抗扰控制器获得永磁同步电机的q轴电压预测值,该q轴电压预测值与d轴电压预测值同时输入svpwm模块获得pwm控制信号并输入逆变器,以实现对永磁同步电机的驱动控制,解决了传统的控制器鲁棒性和抗扰能力差的问题,提高了控制器的鲁棒性和抗扰能力。
[0051]
2、使用非线性扩张状态观测器观测代替了传统的线性扩张状态观测器,提高了对永磁同步电机的跟踪效率,同时提高了二阶自抗扰控制器的控制速率。
[0052]
3、通过二阶自抗扰控制器观测永磁同步电机的扰动并进行扰动补偿控制,获得永磁同步电机的q轴电压预测值,同时,跟踪微分器、非线性扩张状态观测器和非线性状态误差反馈相互配合以实现对永磁同步电机的跟踪和信号的获取,简单易行,易于实施,提高了二阶自抗扰控制器的控制效率。
[0053]
本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
附图说明
[0054]
附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
[0055]
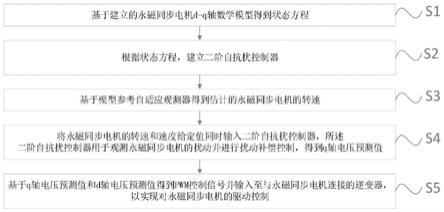
图1为一个实施例中基于二阶自抗扰控制的永磁同步电机控制方法流程图;
[0056]
图2为一个实施例中基于模型参考自适应观测器的速度估计原理图;
[0057]
图3为一个实施例中基于二阶自抗扰的永磁同步电机矢量控制图;
[0058]
图4为另一个实施例中基于二阶自抗扰控制的永磁同步电机控制系统结构图;
[0059]
附图标记:
[0060]
100-数学模型获得模块,200-二阶自抗扰控制器获得模块,300-模型参考自适应观测器获得模块,400-电压预测值获得模块,500-驱动控制实现模块。
具体实施方式
[0061]
下面结合附图来具体描述本发明的优选实施例,其中,附图构成本技术一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
[0062]
现有的扫描驱动机构,包含永磁同步电机和电机驱动控制系统,其中,电机驱动控制系统通常包含电流环、位置环和速度环。传统自抗扰控制器由于速度环为一阶速度自抗扰控制器,电流环仍为传统的pi控制器,造成控制器的鲁棒性差和抗扰能力弱的问题。为此,本技术提出了一种基于二阶自抗扰控制的永磁同步电机控制方法及控制系统,通过建立二阶自抗扰控制器获得永磁同步电机的q轴电压预测值,最后基于永磁同步电机的q轴电压预测值和的d轴电压预测值得到pwm控制信号并输入至与永磁同步电机连接的逆变器,以实现对永磁同步电机的驱动控制,提高了控制器的鲁棒性和抗干扰性能。
[0063]
本发明的一个具体实施例,公开了一种基于二阶自抗扰控制的永磁同步电机控制方法,如图1所示。该控制方法主要基于永磁同步电机的状态方程搭建二阶自抗扰控制器,该二阶自抗扰控制器用于观测系统(永磁同步电机)扰动并进行扰动补偿控制,得到永磁同步电机的q轴电压预测值u
q
。具体包括如下步骤:
[0064]
s1、基于建立的永磁同步电机d-q轴数学模型得到状态方程。具体的,永磁同步电机d-q轴数学模型的计算公式为:
[0065][0066]
式中,i
d
、i
q
为永磁同步电机d、q轴电流值(a);u
d
、u
q
为永磁同步电机d、q轴电压值(v);r
s
为定子绕组电阻(ω);p
n
为极对数;ω
r
为转子机械角速度(rad/s);ψ
f
为永磁体主磁链(v
·
s);j为系统的转动惯量(kg
·
m2);b为系统的粘滞摩擦系数(n
·
m
·
s/rad);t
l
为负载转矩(n
·
m)。
[0067]
然后,基于永磁同步电机采用的矢量控制策略,则状态方程变为:
[0068][0069]
定义永磁同步电机的状态变量x1=ω
r
,可将永磁同步电机的状态方程简化成如下形式:
[0070][0071]
式中,f(x)为包含系统状态的函数且式中,f(x)为包含系统状态的函数且u=u
q
为控制器的输出;为系统的不确定干扰和外部干扰。
[0072]
s2、根据所述状态方程,建立二阶自抗扰控制器,其中,二阶自抗扰控制器用于观测系统扰动并进行扰动补偿控制,得到永磁同步电机的q轴电压预测值u
q
。具体的,二阶自抗扰控制器包括跟踪微分器模型、非线性扩张状态观测器模型和非线性状态误差反馈模型,其中,跟踪微分器模型能够合理安排系统的过渡过程,且有限时间内能够跟踪永磁同步电机的给定转速以及提取转速给定的微分信号。非线性扩张状态观测器模型能够估计系统的观测值,并将该观测值补偿到控制器中。非线性状态误差反馈模型能够将误差信号和误差微分进行非线性组合从而得到q轴电压预测值,以提高控制器的控制效率。
[0073]
优选地,二阶自抗扰控制器包括跟踪微分器模型、非线性扩张状态观测器模型和非线性状态误差反馈模型;二阶自抗扰控制器用于观测系统扰动并进行扰动补偿控制,得到永磁同步电机的q轴电压预测值u
q
,具体包括如下步骤:
[0074]
s201、利用跟踪微分器模型获得速度的跟踪信号v1和速度微分的跟踪信号v2。具体的,跟踪微分器用于对控制系统的设定值安排过渡过程,以降低初始误差,使系统在不改变阻尼的情况下用较大增益来加快过渡过程。其中,跟踪微分器模型的表达公式为:
[0075][0076]
式中,v1为速度的跟踪信号,v2为速度微分的跟踪信号,分别为v1、v2的微分值,r为决定跟踪快慢的参数,ω
r*
为速度给定值,sign()为符号函数。
[0077]
s202、利用非线性扩张状态观测器模型获得速度的观测估计值z1和速度微分的观测估计值z2。具体的,非线性扩张状态观测器模型能够观测永磁同步电机的状态值和系统扰动总和,并将观测的系统扰动总和补偿到控制器中。同时,本技术中使用非线性扩张状态观测器观测代替了传统的线性扩张状态观测器,提高了对永磁同步电机的跟踪效率,同时提高了二阶自抗扰控制器的快速性。其中,非线性扩张状态观测器模型的计算公式如下:
[0078][0079]
式中,z1为速度的观测估计值,z2为速度微分的观测估计值,z3为外界扰动总和的观测估计值,β
01
,β
02
,β
03
为大于零的观测器增益系数,为大于零的观测器增益系数,分别为z1,z2,z3对应的微分值,ω
r
为永磁同步电机的转速,e为观测误差,b为增益补偿,u
q
为永磁同步电机q轴电压,非线性函数fal(e,α,δ)的表达式为:
[0080][0081]
式中,α
m
和δ
n
均为非线性函数fal(e,α,δ)的参数,其中m,n均取1,2,3,4,5。
[0082]
s203、速度的跟踪信号v1与速度的观测估计值z1作差得到误差信号e1,速度微分的跟踪信号v2与速度微分的观测估计值z2作差得到误差微分信号e2。
[0083]
s204、基于得到的误差信号e1及误差微分信号e2,利用非线性状态误差反馈模型得到q轴电压预测值u
q
。具体的,非线性状态误差反馈模型能够将误差信号和误差微分进行非线性组合,从而得到永磁同步电机q轴电压预测值。其中,非线性状态误差反馈模型具有“小误差大增益和大误差小增益”的特点,有助于解决永磁同步电机快速性和超调之间的矛盾,提高控制器的效率。非线性状态误差反馈模型的计算公式如下所示:
[0084][0085]
式中,β
11
和β
12
均为输出误差校正增益,e1为误差信号,e2为误差微分信号,u0为误差信号与误差微分信号的非线性组合。
[0086]
s3、基于模型参考自适应观测器得到估计的永磁同步电机的转速ω
r
。具体的,如图2所示的基于模型参考自适应观测器的速度估计原理图,该模型参考自适应观测器包括电流参考模块和电流可调模块。其中,电流参考模块用于获得永磁同步电机d-q轴的数学模型,表达式如下:
[0087][0088]
将待估计转速信息ω
r
用代替,得到电流可调模型表达式如下:
[0089][0090]
定义广义误差为可得到误差的状态方程为:
[0091][0092]
式中,
[0093]
通过上述公式可以获得永磁同步电机的转速ω
r
。
[0094]
s4、将永磁同步电机的转速ω
r
和速度给定值ω
r*
同时输入二阶自抗扰控制器,得到q轴电压预测值u
q
;以及,将永磁同步电机d轴电流值与d轴电流的参考值作差得到的结果输入pi控制器得到d轴电压预测值u
d
。具体的,d轴电压预测值基于pi控制器获得。
[0095]
s5、基于q轴电压预测值u
q
和d轴电压预测值u
d
得到pwm控制信号并输入至与永磁同步电机连接的逆变器,以实现对永磁同步电机的驱动控制。
[0096]
具体的,如图3所示的基于二阶自抗扰的永磁同步电机矢量控制图,将永磁同步电
机的转速ω
r
和速度给定值ω
r*
同时输入二阶自抗扰控制器,得到q轴电压预测值u
q
,同时,通过pi控制器获得的d轴电压预测值,将d轴电压预测值和q轴电压预测值同时输入坐标变换模块获得α、β轴的电压u
α
和u
β
,并将u
α
和u
β
同时输入svpwm模块获得pwm控制信号并输入与永磁同步电机连接的逆变器,以实现对永磁同步电机的控制。
[0097]
与现有技术相比,本实施例提供的一种基于二阶自抗扰控制的永磁同步电机控制方法,根据建立二阶自抗扰控制器获得永磁同步电机的q轴电压预测值,该永磁同步电机的q轴电压预测值与d轴电压预测值同时输入svpwm模块获得pwm控制信号并输入逆变器,以实现对永磁同步电机的驱动控制,解决了传统的控制器鲁棒性和抗扰能力差的问题,提高了控制器的鲁棒性和抗扰能力。
[0098]
本发明的一个具体实施例,公开了一种基于二阶自抗扰控制的永磁同步电机控制系统,如图4所示。数学模型获得模块100,用于根据建立的永磁同步电机d-q轴数学模型得到状态方程;二阶自抗扰控制器获得模块200,用于根据状态方程,建立二阶自抗扰控制器,其中,二阶自抗扰控制器用于观测系统扰动并进行扰动补偿控制,得到永磁同步电机的q轴电压预测值u
q
;模型参考自适应观测器获得模块300,用于根据模型参考自适应观测器得到估计的永磁同步电机的转速ω
r
;电压预测值获得模块400,用于将永磁同步电机的转速ω
r
和速度给定值ω
r*
同时输入二阶自抗扰控制器,得到q轴电压预测值u
q
;以及,将永磁同步电机d轴电流值与d轴电流的参考值作差得到的结果输入pi控制器得到d轴电压预测值u
d
;驱动控制实现模块500,用于根据q轴电压预测值u
q
和d轴电压预测值u
d
得到pwm控制信号并输入至与永磁同步电机连接的逆变器,以实现对永磁同步电机的驱动控制。
[0099]
一种基于二阶自抗扰控制的永磁同步电机控制系统,根据建立二阶自抗扰控制器获得永磁同步电机的q轴电压预测值,该永磁同步电机的q轴电压预测值与d轴电压预测值同时输入svpwm模块获得pwm控制信号并输入逆变器,以实现对永磁同步电机的驱动控制,解决了传统的控制器鲁棒性和抗扰能力差的问题,提高了控制器的鲁棒性和抗扰能力。
[0100]
具体的,二阶自抗扰控制器获得模块包括跟踪微分器获得单元、非线性扩张状态观测器获得单元和非线性状态误差反馈获得单元,其中,二阶自抗扰控制器用于观测系统扰动并进行扰动补偿控制,得到永磁同步电机的q轴电压预测值u
q
。
[0101]
通过二阶自抗扰控制器用于观测系统扰动并进行扰动补偿控制,获得永磁同步电机的q轴电压预测值,同时,跟踪微分器、非线性扩张状态观测器和非线性状态误差反馈相互配合以实现对永磁同步电机的跟踪和信号的获取,简单易行,易于实施,提高了二阶自抗扰控制器的控制效率。
[0102]
具体来说,跟踪微分器获得单元,用于根据跟踪微分器模型获得速度的跟踪信号v1和速度微分的跟踪信号v2,其中,跟踪微分器模型的计算公式为:
[0103][0104]
式中,v1为速度的跟踪信号,v2为速度微分的跟踪信号,分别为v1、v2的微分值,r为决定跟踪快慢的参数,ω
r*
为速度给定值,sign()为符号函数。
[0105]
通过跟踪微分器获得单元获得了跟踪微分器模型,该模型能够合理安排系统的过
渡过程,且有限时间内能够跟踪永磁同步电机的给定转速以及提取转速给定的微分信号,提高了二阶自抗扰控制器与永磁同步电机之间信号的实时性。
[0106]
非线性扩张状态观测器获得单元,用于根据非线性扩张状态观测器模型获得速度的观测估计值z1和速度微分的观测估计值z2,其中,非线性扩张状态观测器模型的计算公式如下:
[0107][0108]
式中,z1为速度的观测估计值,z2为速度微分的观测估计值,z3为外界扰动总和的观测估计值,β
01
,β
02
,β
03
为大于零的观测器增益系数,为大于零的观测器增益系数,分别为z1,z2,z3的微分值,ω
r
为永磁同步电机的转速,e为观测误差,b为增益补偿,u
q
为永磁同步电机q轴电压,非线性函数fal(e,α,δ)的表达式为:
[0109][0110]
式中,α
m
和δ
n
均为非线性函数fal(e,α,δ)的参数,其中m,n均取1,2,3,4,5。
[0111]
通过非线性扩张状态观测器获得单元获得了非线性扩张状态观测器模型,该模型能够观测系统的状态值以及扰动总和,并将观测的系统扰动总和补偿到控制器中。同时,该非线性扩张状态观测器相比于线性扩张状态观测器的效率更好,能够提高控制器的快速性。
[0112]
速度的跟踪信号v1与速度的观测估计值z1作差得到误差信号e1,速度微分的跟踪信号v2与速度微分的观测估计值z2作差得到误差微分信号e2;非线性状态误差反馈获得单元,用于根据非线性状态误差反馈模型得到q轴电压预测值u
q
,其中,非线性状态误差反馈模型的计算公式如下:
[0113][0114]
式中,β
11
和β
12
均为输出误差校正增益,e1为误差信号,e2为误差微分信号,u0为误差信号与误差微分信号的非线性组合。
[0115]
通过非线性状态误差反馈获得单元获得了非线性状态误差反馈模型,该模型能够将误差信号和误差微分进行非线性组合从而得到q轴电压预测值,继而实现对永磁同步电机的驱动控制,提高了控制器的控制效率。
[0116]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,
任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。