1.该专利文档中所公开的技术和实现总体上涉及用于感测距目标对象的距离的图像传感器。
背景技术:
2.图像传感器用于电子装置中,以通过使用对光起反应的半导体材料将光转换为电信号来捕获光学图像。随着汽车、医疗、计算机和通信行业的最新发展,在诸如智能电话、数码相机、游戏机、iot(物联网)、机器人、安全摄像头和医疗微型摄像头之类的各种电子装置中,对高性能图像传感器的需求日益增长。
3.图像传感器可以大致分为ccd(电荷耦合器件)图像传感器和cmos(互补金属氧化物半导体)图像传感器。ccd图像传感器创建高质量、低噪声的图像,并且传统上,在噪声特性方面具有优于cmos图像传感器的优势。然而,由于相对于ccd对应物的包括例如更高的帧速率和更快的快门速度的一些优点,cmos图像传感器现已得到广泛使用。此外,cmos图像传感器和信号处理电路可以集成到单个芯片中,从而可以在实现更低功耗的同时将电子装置小型化。此外,使用cmos制造技术能够降低生产成本。cmos图像传感器的这种特性更适合于移动装置中的实现。
4.已经通过大量研究开发了使用图像传感器测量深度(例如,距目标对象的距离)的技术,并且在诸如安全装置、医疗装置、车辆、游戏机、虚拟现实(vr)/增强现实ar装置和移动装置之类的各种装置中,对测量深度的技术的需求日益增加。测量深度的方法的示例可以包括三角测量、tof(飞行时间)和干涉测量法。在上述深度测量方法当中,飞行时间(tof)方法由于其应用范围广、处理速度快及成本优势而变得流行。tof方法使用发射光和反射光来测量距离。tof方法可以依据确定距离的是往返时间还是相位差而大致分为直接方法和间接方法。直接方法可以通过计算往返时间来测量距离,间接方法可以使用相位差来测量距离。由于直接方法适合于测量长距离,因此直接方法广泛用于汽车中。间接方法适合于测量短距离,因此广泛用于被设计为以更高速度操作的各种高速装置中,例如,游戏机或移动相机。与直接型tof系统相比,间接方法具有几个优点,包括电路更简单、存储器需求低以及成本相对低。
5.capd(电流辅助光子解调器)方法是在间接tof传感器中使用的一种类型的像素电路。在capd中,由通过施加基板电压而创建的多数载劣电流在像素电路中产生电子,并且通过使用电场之间的电位差来检测所产生的电子。由于使用了多数载劣电流,因此capd能够快速地检测电子。另外,capd通过检测形成于深的深度处的一些电子而具有优异的效率。
技术实现要素:
6.各种实施方式涉及包括多个像素的图像感测装置,每个像素具有为了小型化而优化的结构。
7.在实施方式中,一种图像感测装置可以包括像素阵列,其包括多个像素,每个像素
被构造为响应于入射光以产生表示检测到的入射光的光电荷。像素阵列包括:第一检测结构和第二检测结构,其位于沿着像素的对角线方向在像素的相对两侧上的像素的顶点区域处,并被配置为接收由像素响应于入射光而产生的并由电流携带的光电荷。
8.在实施方式中,一种图像感测装置可以包括:像素,其设置在基板中并以2
×
2矩阵为单位布置,每个像素被构造为响应于入射光而产生表示检测到的入射光的光电荷;控制节点,其设置在像素的中心并被配置为接收用于在基板中产生电流的控制信号;以及多个检测节点,其设置在各个像素中,并被配置为接收由像素响应于入射光而产生的并由电流携带的光电荷。
9.根据本实施方式,由于以2
×
2矩阵布置的像素不是独立地包括控制节点而是共享控制节点,所以随机像素中的控制节点之间的距离能够增加到最大,这使得可以最小化用于产生空穴电流所需的功率。
10.另外,可以提供能够通过该文档直接或间接确定的各种效果。
附图说明
11.图1是示意性地例示了根据实施方式的图像感测装置的配置的配置图。
12.图2是例示了图1的像素阵列的示例的图。
13.图3是例示了包括在图2所示的像素阵列中的像素的实施方式的图。
14.图4和图5是用于描述以第一模式操作的图像感测装置的操作的图。
15.图6a是用于描述以第一模式操作的图像感测装置的操作的时序图的示例。
16.图6b是用于描述在第一模式下调制光与入射光之间的相位差的计算的曲线图的示例。
17.图7至图10是用于描述以第二模式操作的图像感测装置的操作的图的示例。
18.图11a是用于描述以第二模式操作的图像感测装置的操作的时序图的示例。
19.图11b是用于描述在第二模式下调制光与入射光之间的相位差的计算的曲线图的示例。
20.图12例示了设置在图2所示的像素阵列上的栅格结构的示例。
21.图13例示了设置在图2所示的像素阵列上的栅格结构的另一示例。
22.图14例示了设置在图2所示的像素阵列上的栅格结构的又一示例。
23.图15是用于描述图12至图14所示的栅格结构的图的示例。
24.图16a至图16f是例示了包括在图1的像素阵列中的抽头的其它实施方式的图。
25.图17例示了设置在图2所示的像素阵列上的像素晶体管区域的示例。
26.图18示出了设置在图2所示的像素阵列上的像素晶体管区域的另一示例。
27.图19和图20是例示了包括在图17和图18的第一像素晶体管区域或第二像素晶体管区域中的晶体管的示例的图。
具体实施方式
28.在下文中,将参照附图描述各种实施方式。然而,应理解,所公开的技术不限于特定实施方式,而是包括实施方式的各种修改、等同物和/或替代物。
29.图1是示意性地例示了根据实施方式的图像感测装置的配置的配置图。
30.参照图1,图像感测装置isd可以使用tof(飞行时间)方法来测量距目标对象1的距离。这样的图像感测装置isd可以包括光源10、透镜模块20、像素阵列30和控制块40。
31.光源10响应于来自控制块40的光调制信号mls(调制光信号)而将光发射到目标对象1上。光源10可以是发射特定波长的光(例如,近红外光、红外光或可见光)的ld(激光二极管)或led(发光二极管)、nir(近红外激光器)、点光源、白光灯、其内组合有单色仪的单色光源、或其它激光光源的组合。例如,光源10可以发射波长为800nm至1000nm的红外光。从光源10发射的光可以是以预定频率调制的光。为了便于描述,图1仅例示了一个光源10。然而,可以在透镜模块20周围布置多个光源。
32.透镜模块20可以收集从目标对象1反射的光,并且将收集的光会聚在像素阵列30的像素px上。例如,透镜模块20可以包括具有玻璃表面或塑料表面的会聚透镜或其它圆柱光学元件。透镜模块20可以包括与光轴对准的多个透镜。
33.像素阵列30可以包括以2d矩阵结构连续布置的多个单位像素px,例如,在列方向和行方向上连续布置的多个单位像素px。单位像素px可以形成于半导体基板上,并且每个单位像素px可以将通过透镜模块20入射的光转换成与光的强度相对应的电信号,并且将该电信号作为像素信号输出。此时,像素信号可以是不指示目标对象1的颜色而是指示距目标对象1的距离的信号。单位像素px中的每一个可以是capd(电流辅助光子解调器)像素。下面将参照图2及以下附图来描述每个单位像素px的详细结构和操作。
34.控制块40可以控制光源10将光发射到目标对象1上,并且驱动像素阵列30的单位像素px以处理与从目标对象1反射的光相对应的像素信号,从而测量距目标对象1的表面的距离。
35.控制块40可以包括控制电路41、光源驱动器42、定时控制器43和读出电路44。
36.控制电路41可以响应于从定时控制器43输出的定时信号而驱动像素阵列30的单位像素px。例如,控制电路41可以生成能够选择和控制多条行线当中的一条或更多条行线的控制信号。这样的控制信号可以包括用于在基板内产生空穴电流的解调控制信号、用于控制复位晶体管的复位信号、用于控制累积在检测节点中的光电荷的传输的传输信号、用于在高亮度条件下提供附加电容的浮置扩散信号、以及用于控制选择晶体管的选择信号。图1例示了控制电路41沿着像素阵列30的列方向(或垂直方向)设置。然而,根据实施方式,控制电路41的至少一部分(例如,用于生成解调控制信号的电路)可以沿着像素阵列30的行方向(或水平方向)设置。
37.光源驱动器42可以在定时控制器43的控制下生成能够驱动光源10的光调制信号mls。光调制信号mls可以是以预定频率调制的信号。
38.定时控制器43可以生成用于控制控制电路41、光源驱动器42和读出电路44的操作的定时信号。
39.读出电路44可以在定时控制器43的控制下通过处理从像素阵列30输出的像素信号来生成数字信号形式的像素数据。对于该操作,读出电路44可以包括用于对从像素阵列30输出的像素信号执行相关双采样的cds(相关双采样器)。读出电路44可以包括用于将来自cds的输出信号转换为数字信号的模数转换器。此外,读出电路44可以包括临时存储从模数转换器输出的像素数据并且在定时控制器43的控制下将像素数据输出到外部的缓冲器电路。由于像素阵列30由capd像素组成,所以可以针对像素阵列30的每列提供两条列线以
传输像素信号,并且还可以针对各条列线提供用于处理从列线输出的像素信号的组件。
40.光源10可以朝向由图像感测装置isd捕获的场景发射以预定频率调制的光,并且图像感测装置isd可以感测从场景内的目标对象1反射的调制光(即,入射光),并且生成针对每个单位像素px的深度信息。在调制光和入射光之间,根据图像感测装置isd和目标对象1之间的距离存在时间延迟。这种时间延迟表现为图像感测装置isd生成的信号与用于控制光源10的光调制信号mls之间的相位差。图像处理器(未示出)可以通过计算从图像感测装置isd输出的信号中出现的相位差,来生成包含每个单位像素px的深度信息的深度图像。
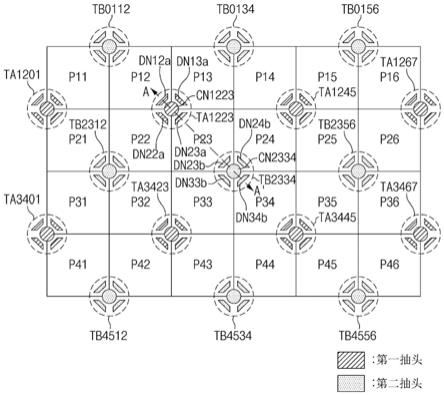
41.图2是简要例示了图1的像素阵列的示例的图。
42.图2例示了像素阵列30的示例。为了便于描述,图2例示了以包括四行六列的矩阵形状布置的24个像素。然而,像素阵列30中所包括的像素的数量可以修改。
43.像素阵列30包括由pnm表示的像素,其中,n表示包括相应像素的行,并且m表示包括相应像素的列。例如,像素p23表示属于第二行第三列的像素。分别位于第一行上方和第一列左侧的行和列被定义为第零行和第零列。分别位于第四行下方和第六列右侧的行和列分别被定义为第五行和第七列。
44.像素阵列30可以包括规则布置的第一抽头(例如,ta1201)和第二抽头(例如,tb0112)。每个抽头是检测结构,该检测结构包括被配置为接收控制信号的控制节点和与该控制节点相邻设置以收集和检测光电荷的多个检测节点。
45.第一抽头和第二抽头中的每一个可以设置在以2
×
2像素矩阵布置的四个像素的中心。例如,参照图2,第一抽头ta1223可以设置在包括像素p12、p13、p22和p23的2
×
2像素矩阵的中心,第二抽头tb2334可以设置在包括像素p23、p24、p33和p34的2
×
2矩阵的中心。第一抽头或第二抽头可以定义为txy,其中x可以指示抽头的类型(例如,第一抽头为a或第二抽头为b),而y可以指示抽头的位置(例如,ta1223设置在与属于第一行和第二行的像素和属于第二列和第三列的像素的交叉处相对应的、包括像素p12、p13、p22和p23的2
×
2矩阵的中心)。在本公开中,当组件设置在四个像素的中心时,不仅可以包括对应组件(例如,第一抽头)的中心与四个像素的中心重合的情况,而且可以包括对应组件的一部分与四个像素交叠的情况。
46.像素阵列30中所包括的像素可以具有矩形形状,并且包括在其左上、右上、左下和右下的四个顶点区域。在本公开中,位于每个像素的左上、右上、左下和右下处的顶点区域分别定义为第一顶点区域、第二顶点区域、第三顶点区域和第四顶点区域。在本公开中,每个顶点区域可以指示包括像素的相应顶点的区域。
47.在每个像素中,第一抽头和第二抽头可以设置在沿对角线方向彼此面对的两个顶点区域中(例如,第一顶点区域和第四顶点区域、或第二顶点区域和第三顶点区域)。连接第一顶点区域和第四顶点区域的对角线方向被定义为第一对角线方向,并且连接第二顶点区域和第三顶点区域的对角线方向被定义为第二对角线方向。当第一抽头和第二抽头在一个像素中沿第一对角线方向设置时,第一抽头和第二抽头可以在与该像素相邻的像素中沿第二对角线方向设置,该相邻的像素位于所述像素的顶侧、底侧、左侧或右侧。
48.在像素阵列30上,第一抽头和第二抽头可以沿第一对角线方向或第二对角线方向交替地布置。例如,基于第一抽头ta1223,第二抽头tb2334、第一抽头ta3445和第二抽头tb4556可以沿第一对角线方向交替地设置。
49.在像素阵列30中,第一抽头或第二抽头可以不设置在连续顶点区域中的每一个中,而是沿行方向(或水平方向)或列方向(或垂直方向)稀疏地设置。第一抽头在沿行方向或列方向不连续的顶点区域处沿着行方向或列方向布置。第二抽头在沿行方向或列方向不连续的顶点区域处沿着行方向或列方向布置。因此,其中第一抽头或第二抽头沿行方向(或水平方向)或列方向(或垂直方向)设置的顶点区域与其中未设置第一抽头和第二抽头的顶点区域可以交替地设置。
50.第一抽头或第二抽头可以包括控制节点和围绕控制节点的检测节点。检测节点与控制节点相邻。图2例示了控制节点具有圆形形状,并且检测节点各自具有梯形形状。然而,本实施方式不限于此。下面将参照图16a至图16f描述控制节点和检测节点的各种实施方式。在图2中,每个检测节点可以具有其中与相应控制节点相邻的第一边比与该第一边相对的第二边短的梯形形状。每个检测节点的这种梯形形状允许以尽可能宽的面积围绕相应控制节点,以便更容易捕获沿着由控制节点形成的空穴电流迁移的信号载流子。
51.控制节点可以设置在组成2
×
2矩阵的四个像素的中心(或每个像素的顶点区域)中,并且检测节点可以设置为在控制节点周围沿第一对角线方向或第二对角线方向彼此面对。检测节点中的每一个可以设置为被包括在与控制节点相邻的四个像素的每一个中。例如,第二抽头tb2334的控制节点cn2334可以设置在包括像素p23、p24、p33和p34的2
×
2矩阵的中心,并且检测节点dn23b、dn24b、dn33b和dn34b可以被分别包括在像素p23、p24、p33和p34中。
52.不同的控制节点接收不同的电压。在不同控制节点之间流动的空穴电流随着控制节点之间的电位差的增加、控制节点之间的距离的减小和/或控制节点的彼此面对的表面面积的增加而增加。在不同控制节点之间流动的空穴电流随着控制节点之间的电位差的减小、控制节点之间的距离的增加和/或控制节点的彼此面对的表面面积的减小而减小。因此,空穴电流可以由控制节点之间的电位差和控制节点之间的电阻决定。控制节点之间的电阻随着控制节点之间的距离的增加以及控制节点的彼此面对的表面面积的减小而增加。
53.根据本实施方式,以2
×
2矩阵布置的像素可以共享控制节点,并且独立地包括检测节点。例如,以2
×
2矩阵布置的像素p23、p24、p33、p34共享设置在2
×
2矩阵的中心的控制节点,并且分别包括相应的检测节点dn23b、dn24b、dn33b、dn34b。由于以2
×
2矩阵布置的像素不独立地包括控制节点而是共享控制节点,因此像素内的控制节点之间的距离能够尽可能地增加。因此,能够减小空穴电流的大小。
54.由于以2
×
2矩阵布置的像素共享控制节点,因此与每个像素独立地包括控制节点的情况相比,像素阵列30所需的控制节点的数量减少到1/4。这种配置能够显著地减少控制电路41需要向其施加电压的负载,并且能够相当大地降低图像感测装置的功耗。
55.在所公开的技术中,包括在第一抽头中的控制节点和检测节点分别定义为第一控制节点和第一检测节点,并且包括在第二抽头中的控制节点和检测节点分别定义为第二控制节点和第二检测节点。
56.将参照图3描述每个像素的结构和操作,图3是沿着图2所示的第一切割线a
‑
a
′
截取的像素阵列30的截面图。
57.图3是例示了包括在图2所示的像素阵列中的像素的实施方式的图。
58.参照图3,像素p23可以包括光电转换区域100和电路区域200。在图3中,以像素p23
为例进行说明。像素阵列30中所包括的其它像素可以具有与像素p23基本相同的结构,并且以与像素p23基本相同的方式操作。
59.光电转换区域100对应于沿着图2的第一切割线a
‑
a
′
截取的像素阵列30的截面。
60.光电转换区域100可以包括第一控制节点cn1223和第二控制节点cn2334以及第一检测节点dn12a、dn23a和第二检测节点dn23b、dn34b。第一控制节点cn1223和第一检测节点dn12a和dn23a可以组成第一抽头(或第一解调节点),并且第二控制节点cn2334和第二检测节点dn23b和dn34b可以组成第二抽头(或第二解调节点)。由于第一检测节点dn12a和第二检测节点dn34b与像素p23的操作没有直接关系,因此这里将省略其详细描述。
61.第一控制节点cn1223和第二控制节点cn2334以及第一检测节点dn23a和第二检测节点dn23b可以形成在基板中。例如,基板可以是p型半导体基板,第一控制节点cn1223和第二控制节点cn2334可以是p型杂质区域或包括p型杂质区域,并且第一检测节点dn23a和第二检测节点dn23b可以是n型杂质区域或包括n型杂质区域。
62.根据实施方式,第一控制节点cn1223和第二控制节点cn2334可以包括具有不同掺杂浓度的p型杂质区域。例如,具有相对低的掺杂浓度的p型杂质区域(p
‑
区域)可以被注入到基板中以具有第一深度,并且具有相对高的掺杂浓度的p型杂质区域(p 区域)可以在相同位置处被注入到基板中以具有第二深度,其中第一深度可以大于第二深度。第一检测节点dn23a和第二检测节点dn23b可以包括具有不同掺杂浓度的n型杂质区域。例如,具有相对低的掺杂浓度的n型杂质区域(n
‑
区域)可以被注入到基板中以具有第三深度,并且具有相对高的掺杂浓度的n型杂质区域(n 区域)可以在相同位置处被注入到基板中以具有第四深度,其中第三深度可以大于第四深度。此外,第一深度可以大于第三深度。
63.第一控制节点cn1223和第二控制节点cn2334以及第一检测节点dn23a和第二检测节点dn23b可以彼此物理地隔离。
64.第一控制节点cn1223和第二控制节点cn2334可以分别从控制电路41接收第一解调控制信号csa和第二解调控制信号csb。第一解调控制信号csa和第二解调控制信号csb之间的电位差产生电场(或空穴电流),以控制由入射光在基板中产生的信号载流子的流动。
65.第一检测节点dn23a和第二检测节点dn23b中的每一个可以起到捕获和累积信号载流子的作用。
66.电路区域200可以包括多个元件,所述多个元件处理由第一检测节点dn23a和第二检测节点dn23b捕获的光电荷,并将光电荷转换为电信号。提供给多个元件的控制信号rst、trg、fdg和sel可以从控制电路41提供。此外,像素电压vpx可以是电源电压vdd或源电压vss。
67.首先,将描述用于处理由第一检测节点dn23a捕获的光电荷的元件。电路区域200可以包括复位晶体管rx_a、传输晶体管tx_a、第一电容器c1_a、第二电容器c2_a、浮置扩散晶体管fdx_a、驱动晶体管dx_a和选择晶体管sx_a。
68.复位晶体管rx_a可以响应于提供至其栅极的复位信号rst的逻辑高电平而被激活,从而将浮置扩散节点fd_a和第一检测节点dn23a的电位复位至预定电平(即,像素电压vpx)。此外,当复位晶体管rx_a被激活时,传输晶体管tx_a可以被同时激活以复位浮置扩散节点fd_a。
69.传输晶体管tx_a可以响应于提供至其栅极的传输信号trg的逻辑高电平而被激
活,从而将第一检测节点dn23a中所存储的电荷传输至浮置扩散节点fd_a。
70.第一电容器c1_a可以联接至浮置扩散节点fd_a,并且提供预定的电容。
71.第二电容器c2_a可以根据浮置扩散晶体管fdx_a的操作选择性地联接至浮置扩散节点fd_a,并且可以提供附加的预定电容。
72.第一电容器c1_a和第二电容器c2_a中的每一个可以被配置为mim(金属
‑
绝缘体
‑
金属)电容器、mip(金属
‑
绝缘体
‑
多晶硅)电容器、mos(金属
‑
氧化物
‑
半导体)电容器和结电容器中的至少一个。
73.浮置扩散晶体管fdx_a可以响应于提供至其栅极的浮置扩散信号fdg的逻辑高电平而被激活,并将第二电容器c2_a联接至浮置扩散节点fd_a。
74.在入射光的发光强度相对高的高亮度条件下,控制电路41可以激活浮置扩散晶体管fdx_a以将浮置扩散节点fd_a联接到第二电容器c2_a。因此,在高亮度条件下,浮置扩散节点fd_a能够累积更多的光电荷,从而确保高动态范围。
75.在入射光的发光强度相对低的低亮度条件下,控制电路41可以停用浮置扩散晶体管fdx_a以将浮置扩散节点fd_a与第二电容器c2_a隔离。
76.根据另一实施方式,可以省略浮置扩散晶体管fdx_a和第二电容器c2_a。
77.由于驱动晶体管dx_a的漏极联接至像素电压vpx,并且驱动晶体管dx_a的源极通过选择晶体管sx_a联接至垂直信号线sl_a,因此驱动晶体管dx_a可以组成具有与垂直信号线sl_a的一端联接的电流源电路cs_a的负载mos的源极跟随器电路。即,驱动晶体管dx_a可以通过选择晶体管sx_a向垂直信号线sl_a输出与联接到其栅极的浮置扩散节点fd_a的电位相对应的电流。
78.选择晶体管sx_a可以响应于提供至其栅极的选择信号sel的逻辑高电平而被激活,并且因此将从驱动晶体管dx_a输出的像素信号输出到垂直信号线sl_a。
79.为了处理由第二检测节点dn23b捕获的光电荷,电路区域200可以包括复位晶体管rx_b、传输晶体管tx_b、第一电容器c1_b、第二电容器c2_b、浮置扩散晶体管fdx_b、驱动晶体管dx_b和选择晶体管sx_b。除了操作定时之外,用于处理由第二检测节点dn23b捕获的光电荷的元件按照与用于处理由第一检测节点dn23a捕获的光电荷的上述元件相同的方式来配置和操作。因此,这里将省略交叠的描述。
80.从电路区域200输出到垂直信号线sl_a和sl_b的像素信号可以通过噪声去除操作和模数转换操作被转换为图像数据。
81.图3例示了通过一条信号线提供复位信号rst、传输信号trg、浮置扩散信号fdg和选择信号sel中的每一个。然而,可以通过多条信号线(例如,两条信号线)来提供复位信号rst、传输信号trg、浮置扩散信号fdg和选择信号sel中的每一个,使得用于处理由第一检测节点dn23a捕获的光电荷的元件和用于处理由第二检测节点dn23b捕获的光电荷的元件以不同的定时操作。
82.图像处理器(未示出)可以通过对从由第一检测节点dn23a捕获的光电荷获取的图像数据和从由第二检测节点dn23b捕获的光电荷获取的图像数据执行运算来计算相位差,根据与每个像素相对应的相位差来计算指示距目标对象1的距离的深度信息,并生成包括与每个像素相对应的深度信息的深度图像。
83.图4和图5是用于描述以第一模式操作的图像感测装置的操作的图。
84.参照图4,图像感测装置isd可以以两种操作模式(即,第一模式和第二模式)操作。
85.第一模式可以指示在划分为第一时段和第二时段的时段中执行图像感测装置isd捕获光电转换区域100的光电荷的操作的模式。第二模式可以指示在划分为第一时段至第四时段的时段中执行图像感测装置isd捕获光电荷的操作的模式。第一模式可以指示2
‑
相调制方法,并且第二模式可以指示4
‑
相调制模式。
86.将参照图4、图5、图6a和图6b描述第一模式的详细操作,并且将参照图7至图10、图11a和图11b描述第二模式的详细操作。在下面的描述中,将以像素p23或包括像素p23的像素组为例。然而,操作可以以基本上相同的方式应用于像素阵列30内的其它像素。
87.图像感测装置isd可以设置为以第一模式和第二模式中的任何一个作为默认模式来操作。根据另一实施方式,用于控制图像感测装置isd的图像处理器(未示出)可以根据用户或系统的请求来决定图像感测装置isd的操作模式,并且将与所决定的操作模式相对应的信号传送到定时控制器43,从而控制图像感测装置isd以相应操作模式进行操作。
88.在第一模式下,可以在作为连续时间段的第一时段和第二时段上执行光电转换区域100对光电荷的捕获。
89.在第一时段中,可以根据光电效应对入射在像素p23中的入射光进行光电转换,从而生成与入射光的强度相对应的电子
‑
空穴对。在本实施方式中,响应于入射光的强度而生成的电子可以指示光电荷。此时,控制电路41可以向第一控制节点cn1223施加第一解调控制信号csa,并且向第二控制节点cn2334施加第二解调控制信号csb。在此,第一解调控制信号csa可以具有比第二解调控制信号csb更高的电压。此时,第一解调控制信号csa的电压可以定义为激活电压(active voltage),并且第二解调控制信号csb的电压可以定义为停用电压(inactive voltage)。例如,第一解调控制信号csa的电压可以是1.2v,并且第二解调控制信号csb的电压可以是0v。
90.第一解调控制信号csa和第二解调控制信号csb之间的电压差可以在第一控制节点cn1223和第二控制节点cn2334之间产生电场,并且空穴电流hc1可以从第一控制节点cn1223流向第二控制节点cn2334。基板内的空穴朝向第二控制节点cn2334迁移,并且基板内的电子朝向第一控制节点cn1223迁移。
91.可以响应于入射光的发光强度而在基板中产生电子,并且电子朝向第一控制节点cn1223迁移,从而被与第一控制节点cn1223相邻的第一检测节点dn23a捕获。因此,基板内的电子可以用作检测入射光的发光强度的信号载流子。
92.参照图5,在第一时段之后的第二时段中,可以根据光电效应对入射到像素p23中的入射光进行光电转换,从而生成与入射光的强度相对应的电子
‑
空穴对。此时,控制电路41可以向第一控制节点cn1223施加第一解调控制信号csa,并且向第二控制节点cn2334施加第二解调控制信号csb。在此,第一解调控制信号csa可以具有比第二解调控制信号csb更低的电压。此时,第一解调控制信号csa的电压可以定义为停用电压,并且第二解调控制信号csb的电压可以定义为激活电压。例如,第一解调控制信号csa的电压可以是0v,并且第二解调控制信号csb的电压可以是1.2v。
93.第一解调控制信号csa和第二解调控制信号csb之间的电压差可以在第一控制节点cn1223和第二控制节点cn2334之间产生电场,并且空穴电流hc2可以从第二控制节点cn2334流向第一控制节点cn1223。因此,基板内的空穴朝向第一控制节点cn1223迁移,并且
基板内的电子朝向第二控制节点cn2334迁移。
94.可以响应于入射光的发光强度而在基板中产生电子,并且电子朝向第二控制节点cn2334迁移,以被与第二控制节点cn2334相邻的第二检测节点dn23b捕获。因此,基板内的电子可以用作检测入射光的发光强度的信号载流子。
95.图6a是用于描述以第一模式操作的图像感测装置的操作的时序图。图6b是用于描述计算在第一模式下调制光和入射光之间的相位差的原理的曲线图。
96.图6a例示了在第一模式下的调制光ml、入射光il、第一解调控制信号csa和第二解调控制信号csb的示例。
97.调制光ml可以表示由控制块40控制的光源10发射到目标对象1的光。调制光ml可以被生成为交替地具有其中调制光ml具有高电平的时段(即,发射光的时段)和其中调制光ml具有低电平的时段(即,不发射光的区间)。
98.入射光il可以表示入射到基板中并因此通过光电效应产生电子
‑
空穴对的光。入射光il可以具有根据图像感测装置isd和目标对象1之间的距离而改变的相位差θ1。
99.调制光ml和入射光il中的每一个的电平可以指示光的强度。
100.当捕获由入射光il产生的电子时,第一解调控制信号csa和第二解调控制信号csb中的每一个可以交替地具有停用电压(低电平)和激活电压(高电平)。此外,第一解调控制信号csa可以与调制光ml同相,并且第二解调控制信号csb可以与调制光ml完全异相(或180
°
(π)的相位差)。在本实施方式中,假设调制光ml和用于生成调制光的光调制信号mls没有相位差。因此,调制光ml和光调制信号mls可以彼此同相。
101.在第一时段pr1中,第一解调控制信号csa可以具有激活电压,并且第二解调控制信号csb可以具有停用电压。因此,由在第一时段pr1中入射的入射光il产生的电子可以通过空穴电流hc1而向第一抽头ta1223迁移,并且被第一检测节点dn23a捕获。在第一时段pr1中,由第一检测节点dn23a捕获的电子可以被定义为q(0)。
102.在第二时段pr2中,第一解调控制信号csa可以具有停用电压,并且第二解调控制信号csb可以具有激活电压。因此,由在第二时段pr2中入射的入射光il产生的电子可以通过空穴电流hc2向第二抽头tb2334迁移,并被第二检测节点dn23b捕获。在第二时段pr2中,由第二检测节点dn23b捕获的电子可以被定义为q(π)。
103.也就是说,由具有根据图像感测装置isd和目标对象1之间的距离而改变的相位差θ1的入射光il所产生的电子可以在第一时段pr1中被第一检测节点dn23a捕获或在第二时段pr2中被第二检测节点dn23b捕获。
104.图6b是例示了相位差θ1与检测到的q(0)和q(π)之间的关系的图。在图6b中,y轴指示电荷,并且x轴指示相位差。
105.由入射光il产生的总电荷可以被定义为q(0)和q(π)之和。随着相位差的增加,q(π)线性地增加,而q(0)线性地减少。因此,基于q(0)与q(π)之比,可以计算出相位差θ1。
106.例如,可以根据下式1来计算相位差θ1。
107.[式1]
[0108][0109]
图像处理器(未示出)可以基于与从像素p23接收到的并在第一时段pr1中捕获的q
(0)相对应的图像数据和与在第二时段pr2中捕获的q(π)相对应的图像数据,通过计算q(0)与q(π)之比来计算相位差,从而获取图像感测装置isd与目标对象1之间的距离。
[0110]
图7至图10是用于描述以第二模式操作的图像感测装置的操作的图。
[0111]
参照图7,在第二模式下,可以在作为不同时间段的第一时段至第四时段上执行光电转换区域100对光电荷的捕获。
[0112]
虽然第一模式以像素(例如,p23)为单位执行,但是第二模式可以以像素组为单位执行,每个像素组包括彼此相邻并以2
×
2矩阵布置的四个像素。在图7至图10中,以包括像素p23、p24、p33和p34的像素组为例进行描述。然而,相同的结构和操作可以应用于像素阵列30内的其它像素组。像素p23、p24、p33和p34可以分别定义为第一像素、第三像素、第二像素和第四像素。
[0113]
与矩形相对应的像素组可以具有其中分别设置有第一抽头ta1223、ta1245、ta3423和ta3445的顶点区域,并且第二抽头tb2334可以设置在像素组的中心。
[0114]
在第一时段中,可以根据光电效应对入射在像素p23中的入射光进行光电转换,从而产生与入射光的强度相对应的电子
‑
空穴对。此时,控制电路41可以向第一控制节点cn1223施加第一解调控制信号csa
‑
1,并且向第二控制节点cn2334施加第二解调控制信号csb。此时,第一解调控制信号csa
‑
1的电压可以是激活电压,而第二解调控制信号csb的电压可以是停用电压。
[0115]
第一解调控制信号csa
‑
1和第二解调控制信号csb之间的电压差可以在第一控制节点cn1223和第二控制节点cn2334之间产生电场,并且空穴电流hc3可以从第一控制节点cn1223流向第二控制节点cn2334。响应于入射光的发光强度而在像素p23中产生的电子可以朝向第一控制节点cn1223迁移,并被与第一控制节点cn1223相邻的第一检测节点dn23a捕获。
[0116]
参照图8,在第一时段之后的第二时段中,可以根据光电效应对入射在像素p34中的入射光进行光电转换,并生成与入射光的强度相对应的电子
‑
空穴对。此时,控制电路41可以向第一控制节点cn3445施加第一解调控制信号csa
‑
2,并且向第二控制节点cn2334施加第二解调控制信号csb。此时,第一解调控制信号csa
‑
2的电压可以是激活电压,而第二解调控制信号csb的电压可以是停用电压。
[0117]
第一解调控制信号csa
‑
2和第二解调控制信号csb之间的电压差可以在第一控制节点cn3445和第二控制节点cn2334之间产生电场,并且空穴电流hc4可以从第一控制节点cn3445流向第二控制节点cn2334。响应于入射光的发光强度而在像素p34中产生的电子可以朝向第一控制节点cn3445迁移,并被与第一控制节点cn3445相邻的第一检测节点dn34a捕获。
[0118]
参照图9,在第三时段中,可以根据光电效应对入射在像素p24中的入射光进行光电转换,从而产生与入射光的强度相对应的电子
‑
空穴对。此时,控制电路41可以向第一控制节点cn1245施加第一解调控制信号csa
‑
3,并且向第二控制节点cn2334施加第二解调控制信号csb。此时,第一解调控制信号csa
‑
3的电压可以是激活电压,而第二解调控制信号csb的电压可以是停用电压。
[0119]
第一解调控制信号csa
‑
3和第二解调控制信号csb之间的电压差可以在第一控制节点cn1245和第二控制节点cn2334之间产生电场,并且空穴电流hc5可以从第一控制节点
cn1245流向第二控制节点cn2334。响应于入射光的发光强度而在像素p24中产生的电子可以朝向第一控制节点cn1245迁移并被与第一控制节点cn1245相邻的第一检测节点dn24a捕获。
[0120]
参照图10,在第三时段之后的第四时段中,可以根据光电效应对入射在像素p33中的入射光进行光电转换,从而生成与入射光的强度相对应的电子
‑
空穴对。此时,控制电路41可以向第一控制节点cn3423施加第一解调控制信号csa
‑
4,并且向第二控制节点cn2334施加第二解调控制信号csb。此时,第一解调控制信号csa
‑
4的电压可以是激活电压,而第二解调控制信号csb的电压可以是停用电压。
[0121]
第一解调控制信号csa
‑
4和第二解调控制信号csb之间的电压差可以在第一控制节点cn3423和第二控制节点cn2334之间产生电场,并且空穴电流hc6可以从第一控制节点cn3423流向第二控制节点cn2334。响应于入射光的发光强度而在像素p33中产生的电子可以朝向第一控制节点cn3423迁移,并被与第一控制节点cn3423相邻的第一检测节点dn33a捕获。
[0122]
在第一时段至第四时段中,激活电压可以在不同的定时被施加至第一控制节点cn1223、cn1245、cn3423和cn3445,并且停用电压可以被连续地施加至第二控制节点cn2334。
[0123]
图11a是用于描述以第二模式操作的图像感测装置的操作的时序图。图11b是用于描述计算在第二模式下调制光与入射光之间的相位差的原理的曲线图。
[0124]
图11a例示了在第二模式下的调制光ml、入射光il、第一解调控制信号csa
‑
1、csa
‑
2、csa
‑
3和csa
‑
4以及第二解调控制信号csb的示例。
[0125]
由于调制光ml和入射光il与参照图6a描述的内容基本上相同,因此这里将省略交叠的描述。入射光il可以具有根据图像感测装置isd和目标对象1之间的距离而改变的相位差θ2。
[0126]
当捕获由入射光il产生的电子时,第一解调控制信号csa
‑
1、csa
‑
2、csa
‑
3和csa
‑
4中的每一个可以交替地具有停用电压和激活电压。当捕获由入射光il产生的电子时,第二解调控制信号csb可以保持停用电压。第一解调控制信号csa
‑
1可以与调制光ml同相,并且第一解调控制信号csa
‑
2可以与调制光ml完全异相(或者相位差为180
°
(π))。第一解调控制信号csa
‑
3可以与调制光ml具有90
°
(π/2)的相位差,并且第一解调控制信号csa
‑
4可以与调制光ml具有270
°
(3π/2)的相位差。
[0127]
在第一时段pr1中,第一解调控制信号csa
‑
1可以具有激活电压,而第二解调控制信号csb可以具有停用电压。因此,由在第一时段pr1中入射的入射光il产生的电子可以通过空穴电流hc3向第一抽头ta1223迁移,并被第一检测节点dn23a捕获。在第一时段pr1中,由第一检测节点dn23a捕获的电子可以被定义为q(0)。
[0128]
在第二时段pr2中,第一解调控制信号csa
‑
2可以具有激活电压,并且第二解调控制信号csb可以具有停用电压。因此,由在第二时段pr2中入射的入射光il产生的电子可以通过空穴电流hc4向第一抽头ta3445迁移,并被第一检测节点dn34a捕获。在第二时段pr2中,由第一检测节点dn34a捕获的电子可以被定义为q(π)。
[0129]
在第三时段pr3中,第一解调控制信号csa
‑
3可以具有激活电压,并且第二解调控制信号csb可以具有停用电压。因此,由在第三时段pr3中入射的入射光il产生的电子可以
通过空穴电流hc5向第一抽头ta1245迁移,并被第一检测节点dn24a捕获。在第三时段pr3中,由第一检测节点dn24a捕获的电子可以被定义为q(π/2)。
[0130]
在第四时段pr4中,第一解调控制信号csa
‑
4可以具有激活电压,并且第二解调控制信号csb可以具有停用电压。因此,由在第四时段pr4中入射的入射光il产生的电子可以通过空穴电流hc6向第一抽头ta3423迁移,并被第一检测节点dn33a捕获。在第四时段pr4中,由第一检测节点dn33a捕获的电子可以被定义为q(3π/2)。
[0131]
也就是说,由具有根据图像感测装置isd和目标对象1之间的距离而改变的相位差θ2的入射光il所产生的电子可以在第一时段pr1中被第一检测节点dn23a捕获,在第二时段pr2中被第一检测节点dn34a捕获,在第三时段pr3中被第一检测节点dn24a捕获,或在第四时段pr4中被第一检测节点dn33a捕获。
[0132]
第二模式可以以像素组为单位来执行,每个像素组包括彼此相邻并以2
×
2矩阵布置的像素p23、p24、p33和p34。第一检测节点dn23a可以捕获由在第一时段pr1中入射到像素组中的入射光il产生的电子,第一检测节点dn34a可以捕获由在第二时段pr2中入射到像素组中的入射光il产生的电子,第一检测节点dn24a可以捕获由在第三时段pr3中入射到像素组中的入射光il产生的电子,并且第一检测节点dn33a可以捕获由在第四时段pr4中入射到像素组中的入射光il产生的电子。
[0133]
在本公开中,描述将集中于包括像素p23、p24、p33和p34的像素组。然而,围绕第一控制节点cn1223的四个第一检测节点中的每一个可以捕获由在第一时段pr1中入射在不同像素组中的入射光il产生的电子,并且围绕第一控制节点cn3445的四个第一检测节点中的每一个可以捕获由在第二时段pr2中入射在不同像素组中的入射光il产生的电子。围绕第一控制节点cn1245的四个第一检测节点中的每一个可以捕获由在第三时段pr3中入射在不同像素组中的入射光il产生的电子,并且围绕第一控制节点cn3423的四个第一检测节点中的每一个可以捕获由在第四时间段pr4中入射在不同像素组中的入射光il产生的电子。
[0134]
因此,在像素阵列30中所包括的像素组中的与第一时段pr1至第四时段pr4相对应的第一抽头的位置对于每个像素组可以是不同的。例如,在由像素p21、p22、p31和p32形成的像素组的情况下,对应于第一时段pr1的第一抽头可以是ta1223,对应于第二时段pr2的第一抽头可以是ta3401,对应于第三时段pr3的第一抽头可以是ta1201,并且对应于第四时段pr4的第一抽头可以是ta3423。
[0135]
在图2的像素阵列中,当如图11a所示地施加解调控制信号时,像素p12、p13、p16、p22、p23和p26可以在第一时段pr1中捕获电子,像素p31、p34、p35、p41、p44和p45可以在第二时段pr2中捕获电子,像素p11、p14、p15、p21、p24和p25可以在第三时段pr3中捕获电子,并且像素p32、p33、p36、p42、p43和p46可以在第四时段pr4中捕获电子。
[0136]
此外,与一个像素组中的任何一个第一抽头相对应的时间段可以不固定而是可以改变。
[0137]
图11b是例示了相位差θ2与检测到的q(0)、q(π/2)、q(π)和q(3π/2)之间的关系的曲线图。在图11b中,y轴指示差分电荷,并且x轴指示相位差。
[0138]
假设在第一时段pr1和第二时段pr2以及第三时段pr3和第四时段pr4中分开捕获由入射到像素组中的入射光il产生的电子,并且在第一时段pr1和第二时段pr2中捕获的电荷量和在第三时段pr3和第四时段pr4中捕获的电荷量彼此相等。即,由入射光il产生的总
电荷可以定义为q(0)和q(π)之和或q(π)和q(3π/2)之和。
[0139]
q(0)与q(π)之间的差的绝对值被定义为δq(0)(=
│
q(0)
‑
q(π)
│
),并且q(π/2)和q(3π/2)之差的绝对值被定义为δq(π/2)(=
│
q(π/2)
‑
q(3π/2)
│
)。由于用于获取q(0)的第一解调控制信号csa
‑
1和用于获取q(π)的第一解调控制信号csa
‑
2与用于获取q(π/2)的第一解调控制信号csa
‑
3和用于获取q(3π/2)的第一解调控制信号csa
‑
4具有90
°
的相位差,所以δq(0)和δq(π/2)之和可以具有恒定值(即,总电荷)。
[0140]
图11b的图例示了相对于具有恒定值的δq(0)和δq(π/2)之和,δq(0)和δq(π/2)依据相位差θ2的变化。即,随着相位差θ2增大,δq(0)可以在相位差θ2的范围从0到π的区间内线性地减小,并且在相位差θ2的范围从π至2π的区间内线性地增加。此外,δq(π/2)可以在相位差θ2的范围从0到π/2的区间内线性地增加,在相位差θ2的范围从π/2到3π/2的区间内线性地减小,并且在相位差θ2的范围从3π/2到2π的区间内线性地增加。因此,基于δq(0)与δq(π/2)之比,可以计算相位差。
[0141]
例如,可以根据下式2来计算相位差θ2。
[0142]
[式2]
[0143][0144]
图像处理器(未示出)可以基于从像素组中所包括的像素p23、p24、p33和p34接收的、与在第一时段pr1中捕获的q(0)相对应的图像数据、与在第二时段pr2中捕获的q(π)相对应的图像数据、与在第三时段pr3中捕获的q(π/2)相对应的图像数据以及与在第四时段pr4中捕获的q(3π/2)相对应的图像数据,来计算δq(0)和δq(π/2),并通过计算δq(0)与δq(π/2)之比来计算相位差,从而获取图像感测装置isd与目标对象1之间的距离。
[0145]
具体地,根据如在第二模式中的4
‑
相调制方法,当计算相位差时,可以使用诸如δq(0)和δq(π/2)之类的差分值。因此,能够去除分别包含在q(0)、q(π)、q(π/2)和q(3π/2)中的背景噪声分量,使得可以更准确地计算距离。此外,由于能够通过一次捕获操作一次获取q(0)、q(π)、q(π/2)和q(3π/2),所以能够提高距离计算速度,并且能够针对高速移动的对象精确地执行距离计算。
[0146]
图12例示了设置在图2所示的像素阵列上的栅格结构的示例。
[0147]
图12例示了设置在图2的像素阵列30上的第一栅格结构1200。为了便于描述,在图12中,第一抽头(例如,ta1201)和第二抽头(例如,tb0112)被示为具有菱形形状。
[0148]
第一栅格结构1200可以吸收或反射入射在像素阵列30上的光,从而阻止光传输到基板中。第一栅格结构1200可以包括具有高吸光率的金属(例如,钨)或具有高反射率的金属(例如,铝)中的至少一种。
[0149]
第一栅格结构1200可以沿着彼此相邻的像素之间的边界伸长。第一栅格结构1200可以包括:第一区域,该第一区域沿着在上下方向上彼此相邻的像素之间的边界在水平方向(或行方向)上延伸;以及第二区域,该第二区域沿着在左右方向上彼此相邻的像素之间的边界在垂直方向(或列方向)上延伸。第一区域和第二区域可以彼此连接并且整体上形成为网格类型。
[0150]
沿着在上下方向上相邻的像素之间的边界在水平方向(或行方向)上延伸的区域可以具有第一宽度w1,并且沿着在左右方向上相邻的像素之间的边界在垂直方向(或列方向)上延伸的区域可以具有第二宽度w2。第一宽度w1可以等于或大于第一抽头和第二抽头中的每一个的垂直长度,并且第二宽度w2可以等于或大于第一抽头和第二抽头中的每一个的水平长度。因此,第一栅格结构1200可以完全覆盖第一抽头和第二抽头。
[0151]
由入射在彼此相邻的像素之间的边界周围的光所产生的电子容易迁移并且被相邻像素而不是光所入射的像素捕获,这引起诸如串扰现象之类的不良影响。因此,这些电子充当像素信号中的噪声。
[0152]
此外,直接入射在第一抽头和第二抽头的位置上的光可以在与第一抽头和第二抽头的相应检测节点相邻的区域中被光电转换,从而产生电子。电子可以由位于附近的检测节点捕获,而与空穴电流无关。因此,这样的电子可以充当像素信号中的噪声。
[0153]
第一栅格结构1200可以使入射在彼此相邻的像素之间的边界周围的光以及直接入射在第一抽头和第二抽头的每个位置上的光所产生的噪声最小化。
[0154]
图13例示了设置在图2所示的像素阵列上的栅格结构的另一示例。
[0155]
图13例示了设置在图2的像素阵列30上的第二栅格结构1300。由于第二栅格结构1300具有与第一栅格结构1200基本相同的功能和材料,因此将省略相同的描述。
[0156]
第二栅格结构1300可以包括第一抽头保护区域1310、第二抽头保护区域1320和检查区域1330。
[0157]
第一抽头保护区域1310可以具有与每个第一抽头相对应的形状和面积,并且因此完全覆盖每个第一抽头。
[0158]
第二抽头保护区域1320可以具有与每个第二抽头相对应的形状和面积,并且因此完全覆盖每个第二抽头。
[0159]
检查区域1330可以沿着彼此相邻的像素之间的边界伸长。沿着在上下方向上相邻的像素之间的边界在水平方向(或行方向)上延伸的检查区域1330可以具有第三宽度w3,并且沿着在左右方向上相邻的像素之间的边界在垂直方向(或列方向)上延伸的检查区域1330可以具有第四宽度w4。第三宽度w3可以小于第一抽头和第二抽头中的每一个的垂直长度,并且第四宽度w4可以小于第一抽头和第二抽头中的每一个的水平长度。检查区域1330的第三宽度w3和第四宽度w4可以具有实验已决定的值,以在减小串扰的同时提高像素的光接收效率。
[0160]
第二栅格结构1300可以减少由入射在彼此相邻的像素之间的边界周围的光和直接入射在第一抽头和第二抽头的每个位置上的光产生的噪声,并且优化像素的光接收效率。
[0161]
图14例示了设置在图2所示的像素阵列上的栅格结构的又一示例。
[0162]
图14例示了设置在图2的像素阵列30上的第三栅格结构1400。由于第三栅格结构1400具有与第一栅格结构1200相同的功能和材料,因此将省略重复的描述。
[0163]
第三栅格结构1400可以包括第一抽头保护区域1410和检查区域1430。由于第一抽头保护区域1410和检查区域1430的结构和功能与参照图13描述的第一抽头保护区域1310和检查区域1330的结构和功能基本相同,因此这里省略相同的描述。
[0164]
与第二栅格结构1300不同,第三栅格结构1400可以不包括第二抽头保护区域。第
三栅格结构1400可以应用于以第二模式操作的图像感测装置isd。这是因为:由于第二抽头在第二模式下连续被停用(向控制节点施加停用电压,并且不执行检测节点的电子捕获),因此不需要阻挡直接入射在每个第二抽头的位置上的光。因此,第三栅格结构1400不仅可以减少由入射在彼此相邻的像素之间的边界周围的光和直接入射在第一抽头的每个位置上的光而产生的噪声,而且还可以优化像素的光接收效率。
[0165]
图15是用于描述图12至图14所示的栅格结构的图。
[0166]
图15简要地并且代表性地例示了图12至图14所例示的栅格结构当中的、沿着图13的第二切割线b
‑
b
′
截取的栅格结构的截面图。
[0167]
基板1500可以包括光入射的第一表面和面对该第一表面的第二表面。
[0168]
在基板1500的内部的左侧上,第一抽头ta1223可以邻近第二表面设置。在基板1500的内部的右侧上,第二抽头tb2334可以邻近第二表面设置。
[0169]
第一抽头保护区域1310可以设置在基板1500的第一表面上,以与第一抽头ta1223交叠。
[0170]
第二抽头保护区域1320可以设置在基板1500的第一表面上,以与第二抽头tb2334交叠。
[0171]
第一抽头保护区域1310和第二抽头保护区域1320可以如虚线所示地分别阻挡直接入射在检测节点dn12a、dn23a、dn23b和dn34b的位置上的光。此外,由通过除了第一抽头保护区域1310和第二抽头保护区域1320之外的开口入射的光所产生的电子可以对像素p23的像素信号有贡献。
[0172]
图16a至图16f是例示了包括在图1的像素阵列中的抽头的其它实施方式的图。
[0173]
参照图16a至图16f,由控制节点(例如,1610)和检测节点(例如,1615
‑
1至1615
‑
4)组成的抽头可以是像素阵列30中包括的第一抽头或第二抽头。除了下面将描述的差异之外,图16a至图16f的控制节点和检测节点的结构和操作与参照图2描述的控制节点和检测节点的结构和操作基本相同。
[0174]
在图16a至图16d中,控制节点1610、1620、1630和1640中的每一个可以具有圆形形状,并且可以修改检测节点的形状。
[0175]
在图16a中,围绕控制节点1610的检测节点1615
‑
1至1615
‑
4中的每一个可以形成为l形状,使得其弯曲部分被设置为面向远离控制节点1610的方向。
[0176]
在图16b中,围绕控制节点1620的检测节点1625
‑
1至1625
‑
4中的每一个可以形成为矩形形状,使得其每条边相对于像素的每条边旋转预定角度。
[0177]
在图16c中,围绕控制节点1630的检测节点1635
‑
1至1635
‑
4中的每一个可以形成为梯形形状,使得其每条边相对于像素的每条边旋转预定角度。检测节点1635
‑
1至1635
‑
4中的每一个的和控制节点1630相邻的边与面对该相邻边的边的比率可以小于图2的检测节点中的比率。
[0178]
在图16d中,围绕控制节点1640的检测节点1645
‑
1至1645
‑
4中的每一个可以形成为直角三角形形状,使得其斜边远离控制节点1640设置并且与直角相对应的顶点区域靠近控制节点1640设置。
[0179]
尽管图16a至图16d的检测节点具有彼此不同的形状,但是每个检测节点被设置为以尽可能宽的面积围绕相应的控制节点。具有这种形状的检测节点可以更容易捕获沿着由
控制节点形成的空穴电流迁移的信号载流子。
[0180]
在图16e中,控制节点1650可以具有十字形状( ),该十字形状具有从顶点区域在四个方向上延伸的四条腿。围绕控制节点1650的检测节点1655
‑
1至1655
‑
4中的每一个可以具有与参照图16d所描述的形状相同的形状。因此,由于控制节点1650具有沿着检测节点1655
‑
1至1655
‑
4的除了其斜边以外的边延伸的形状,因此控制节点1650可以形成宽度与检测节点1655
‑
1至1655
‑
4的宽度类似的空穴电流。因此,能够更有效地捕获信号载流子。
[0181]
在图16f中,控制节点1660可以具有与参照图16e所描述的形状相同的形状。控制节点1660可以具有与坐标轴相似的形状,并且围绕控制节点1660的检测节点1665
‑
1至1665
‑
4可以形成为填充由控制节点1660形成的坐标轴的象限的形状。检测节点1665
‑
1至1665
‑
4中的每一个可以具有矩形形状。控制节点1660和每个检测节点1665
‑
1至1665
‑
4可以设置为彼此邻接。因此,控制节点1660和检测节点1665
‑
1至1665
‑
4可以具有其中十字形状被包括在矩形中的形状。
[0182]
由于控制节点1660和检测节点1665
‑
1至1665
‑
4被设置为彼此邻接,因此控制节点1660和检测节点1665
‑
1至1665
‑
4可以仅通过相反掺杂的结隔离来彼此物理隔离。在所公开的技术中,控制节点和与该控制节点相邻的检测节点彼此间隔开预定距离。然而,根据本实施方式,控制节点和与该控制节点相邻的检测节点可以仅通过结隔离来彼此隔离,如控制节点1660和检测节点1665
‑
1至1665
‑
4。
[0183]
当控制节点和与控制节点相邻的检测节点彼此间隔开预定距离时,控制节点和与控制节点相邻的检测节点可以通过用介电材料经由间隙填充通过sti(浅沟槽隔离)工艺形成的沟槽形成的介电层来彼此隔离。
[0184]
虽然图16a至图16f例示了控制节点和检测节点的形状和布置,但是所公开技术的范围不限于此。根据各种实施方式,控制节点可以设置为由彼此相邻的像素共享,并且与彼此相邻的相应像素相对应的检测节点可以彼此物理隔离。
[0185]
图17例示了设置在图2所示的像素阵列上的像素晶体管区域的示例。
[0186]
在图17中,将以像素p23、p24、p33和p34为例进行描述。然而,其它像素也可以具有基本相同的结构。
[0187]
首先,像素p23可以包括第一像素晶体管区域pa23a
‑
1和pa23a
‑
2以及第二像素晶体管区域pa23b
‑
1和pa23b
‑
2。
[0188]
第一像素晶体管区域pa23a
‑
1和pa23a
‑
2可以包括用于处理由第一抽头ta1223的第一检测节点dn23a捕获的光电荷的晶体管。第一像素晶体管区域pa23a
‑
1和pa23a
‑
2可以被分成两个区域,并且第一像素晶体管区域pa23a
‑
1可以沿着连接到像素p23的第二顶点区域的一侧(即,右侧)延伸,并且第一像素晶体管区域pa23a
‑
2可以沿着连接到像素p23的第二顶点区域的另一侧(即,顶侧)延伸。根据另一实施方式,第一像素晶体管区域可以不分成两个区域,而是形成为l形状,使得其弯曲部分与像素p23的第二顶点区域相邻。
[0189]
第二像素晶体管区域pa23b
‑
1和pa23b
‑
2可以包括用于处理由第二抽头tb2334的第二检测节点dn23b捕获的光电荷的晶体管。第二像素晶体管区域pa23b
‑
1和pa23b
‑
2可以被分成两个区域,并且第二像素晶体管区域pa23b
‑
1可以沿着连接到像素p23的第三顶点区域的一侧(即,左侧)延伸,第二像素晶体管区域pa23b
‑
2可以沿着连接到像素p23的第三顶点区域的另一侧(即,底侧)延伸。根据另一实施方式,第二像素晶体管区域可以不分成两个
区域,而是形成为l形,使得其弯曲部分与像素p23的第三顶点区域相邻。
[0190]
在像素p23中,第一像素晶体管区域pa23a
‑
1和pa23a
‑
2以及第二像素晶体管区域pa23b
‑
1和pa23b
‑
2可以相对于连接第一顶点区域和第四顶点区域的对角线对称地设置。
[0191]
由于这种对称的设置,在像素p23中的第一抽头ta1223与第一像素晶体管区域pa23a
‑
1和pa23a
‑
2之间存在的电阻分量(例如,金属线的长度和寄生电容)可以等于在第二抽头tb2334与第二像素晶体管区域pa23b
‑
1和pa23b
‑
2之间存在的电阻分量(例如,金属线的长度和寄生电容)。因此,第一像素晶体管区域pa23a
‑
1和pa23a
‑
2以及第二像素晶体管区域pa23b
‑
1和pa23b
‑
2的像素信号中所包括的噪声分量可以基本上彼此相等,并且可以容易地被图像处理器(未示出)等去除。
[0192]
像素p33的第一像素晶体管区域pa33a
‑
1和pa33a
‑
2以及第二像素晶体管区域pa33b
‑
1和pa33b
‑
2可以基于像素p33和p23之间的边界(即,像素p23的底侧),与像素p23的第一像素晶体管区域pa23a
‑
1和pa23a
‑
2以及第二像素晶体管区域pa23b
‑
1和pa23b
‑
2对称地设置。
[0193]
像素p24的第一像素晶体管区域pa24a
‑
1和pa24a
‑
2以及第二像素晶体管区域pa24b
‑
1和pa24b
‑
2可以基于像素p24和p23之间的边界(即,像素p23的右侧),与像素p23的第一像素晶体管区域pa23a
‑
1和pa23a
‑
2以及第二像素晶体管区域pa23b
‑
1和pa23b
‑
2对称地设置。
[0194]
尽管图17中未示出,但是像素p13的像素晶体管区域可以基于像素p13和像素p23之间的边界与像素p23的像素晶体管区域对称地设置。此外,像素p22的像素晶体管区域可以基于像素22和像素p23之间的边界与像素p23的像素晶体管区域对称地设置。
[0195]
像素p34的像素晶体管区域可以基于像素p24和像素p34之间的边界与像素p24的相应像素晶体管区域对称地设置,并且像素p34的像素晶体管区域可以基于像素p33和像素p34之间的边界与像素p33的相应像素晶体管区域对称地设置。
[0196]
像素阵列30内的像素可以具有基于与相邻像素的边界与相邻像素对称的结构。
[0197]
因此,由于彼此相邻的像素基于它们之间的边界彼此对称地设置,因此存在于第一抽头和第一像素晶体管区域之间的电阻分量以及存在于第二抽头和第二像素晶体管区域之间的电阻分量可以在整个像素阵列30中相等。因此,第一像素晶体管区域和第二像素晶体管区域的像素信号中包含的噪声分量可以在整个像素阵列30中基本上相等,并且因此容易被图像处理器(未示出)等去除。
[0198]
包括在像素中的第一像素晶体管区域和第二像素晶体管区域中的每一个可以沿着未设置有抽头的每个相应顶点区域周围的侧边延伸。由于这种结构,在未设置有抽头的顶点区域周围彼此相邻的像素的像素晶体管区域可以具有十字形状( )。
[0199]
在像素p23的第二顶点区域中,例如,在像素p23的第二顶点区域周围彼此相邻的像素p13、p14、p23和p24的第一像素晶体管区域被聚集并设置为十字形状( )。
[0200]
在像素p23的第三顶点区域中,例如,在像素p23的第三顶点区域周围彼此相邻的像素p22、p23、p32和p33的第二像素晶体管区域被聚集并设置为十字形状( )。
[0201]
尽管未示出,但是可以在未设置有抽头的顶点区域处设置稳压区域。另选地,稳压区域可以不设置在其中未设置有抽头的顶点区域处,而是设置在彼此相邻的像素之间的边界处。
[0202]
稳压区域可以接收接地电压,并且将与稳压区域相邻的p阱的电压钳位到特定电压(例如,接地电压)。p阱可以设置在与稳压区域相邻的四个像素的第一像素晶体管区域或第二像素晶体管区域的底部,从而形成各个晶体管的主体。p阱的电压可以对各个晶体管的阈值电压有影响。稳压区域可以钳位p阱的电压,从而保证第一像素晶体管区域或第二像素晶体管区域中包括的晶体管的稳定操作。
[0203]
图18例示了设置在图2所示的像素阵列上的像素晶体管区域的另一示例。
[0204]
在图18中,将以像素p23、p24、p33和p34为例进行描述。然而,其它像素也可以具有基本相同的结构。由于除了一些结构和功能之外,各个像素的结构和功能与参照图17描述的像素的结构和功能基本相同,因此,在此将省略交叠的描述。
[0205]
首先,像素p23可以包括第一像素晶体管区域pa23a
‑
1和pa23a
‑
2以及第二像素晶体管区域pa23b
‑
1和pa23b
‑
2。
[0206]
第一像素晶体管区域pa23a
‑
1和pa23a
‑
2可以在像素p23的顶部沿水平方向延伸。
[0207]
第二像素晶体管区域pa23b
‑
1和pa23b
‑
2可以在像素p23的底部沿水平方向延伸。
[0208]
在像素p23中,第一像素晶体管区域pa23a
‑
1和pa23a
‑
2以及第二像素晶体管区域pa23b
‑
1和pa23b
‑
2可以相对于穿过像素p23的中心的水平线对称地设置。
[0209]
图18例示了第一像素晶体管区域pa23a
‑
2设置为比第一像素晶体管区域pa23a
‑
1更靠近所述水平线,并且第二像素晶体管区域pa23b
‑
2设置为比第二像素晶体管区域pa23b
‑
1更靠近所述水平线。然而,所公开技术的范围不限于此。
[0210]
与图17所示的像素一样,在图18所示的像素中,像素可以具有基于与相邻像素的边界而与相邻像素对称的结构。
[0211]
此外,可以在未设置有抽头的顶点区域处设置稳压区域。另选地,稳压区域可以不布置在其中未设置有抽头的顶点区域处,而是设置在彼此相邻的像素之间的边界处。
[0212]
图19和图20是例示了图17和图18的第一像素晶体管区域或第二像素晶体管区域中所包括的晶体管的图。
[0213]
参照图19,像素晶体管区域1900可以对应于图17和图18中所例示的第一像素晶体管区域或第二像素晶体管区域的一部分(例如,pa23a
‑
1或pa23b
‑
1)。
[0214]
像素晶体管区域1900可以包括复位晶体管、传输晶体管和浮置扩散晶体管。复位晶体管、传输晶体管和浮置扩散晶体管可以串联联接,并且被称为第一晶体管组。复位晶体管、传输晶体管和浮置扩散晶体管可以对应于参照图3描述的复位晶体管rx_a和rx_b、传输晶体管tx_a和tx_b以及浮置扩散晶体管fdx_a和fdx_b。
[0215]
复位晶体管的栅极1910可以接收复位信号rst,并且复位晶体管的第一端子1940可以被提供有像素电压vpx。根据实施方式,可以从基板上的金属布线区域提供像素电压vpx。金属布线区域可以是其中设置有用于提供像素的操作所需的电压的信号线、用于传输从各个像素输出的信号的信号线、以及用于连接各个像素的内部组件的连接线的区域。复位晶体管的第二端子和传输晶体管的第一端子可以形成一个端子1950,并且端子1950可以联接到第一检测节点或第二检测节点(例如,dn23a或dn23b)。
[0216]
传输晶体管的栅极1920可以接收传输信号trg,并且由传输晶体管的第二端子和浮置扩散晶体管的第一端子形成的端子1960可以联接到第一电容器(图3的c1_a或c1_b)以及驱动晶体管(图20的2010)的栅极。根据实施方式,端子1960可以指示浮置扩散节点本身。
[0217]
浮置扩散晶体管的栅极1930可以接收浮置扩散信号fdg,并且浮置扩散晶体管的第二端子1970可以联接至第二电容器(图3的c2_a或c2_b)。在本公开中,描述了第一晶体管组包括浮置扩散晶体管。然而,根据另一实施方式,可以省略浮置扩散晶体管。在这种情况下,参照图3描述的第二电容器也可以省略。
[0218]
参照图20,像素晶体管区域2000可以对应于图17和图18所示的第一像素晶体管区域或第二像素晶体管区域的一部分(例如,pa23a
‑
2或pa23b
‑
2)。
[0219]
像素晶体管区域2000可以包括驱动晶体管和选择晶体管。驱动晶体管和选择晶体管可以串联联接,并且被称为第二晶体管组。驱动晶体管和选择晶体管可以对应于参照图3描述的驱动晶体管dx_a和dx_b以及选择晶体管sx_a和sx_b。
[0220]
驱动晶体管的栅极2010可以联接到端子1960,并且驱动晶体管的第一端子2030可以被提供有像素电压vpx。驱动晶体管的第二端子和选择晶体管的第一端子可以形成一个端子2040。
[0221]
选择晶体管的栅极2020可以接收选择信号sel,并且选择晶体管的第二端子2050可以联接至垂直信号线(图3的sl_a或sl_b)。
[0222]
可以按照将施加有相同电压的、复位晶体管的第一端子1940和驱动晶体管的第一端子2030彼此集成的方式来设置第一晶体管组和第二晶体管组,从而形成为一个晶体管组。
[0223]
当图19和图20中所示的第一晶体管组和第二晶体管组被设置在图17或图18中所示的第一像素晶体管区域或第二像素晶体管区域中时,第一晶体管组和第二晶体管组可以被设置为满足参照图17和图18所描述的对称性。
[0224]
例如,第一像素晶体管区域pa23a
‑
1和pa24a
‑
1中包括的第一晶体管组可以设置为使得复位晶体管的第一端子1940接近像素p23的第二顶点区域,并且第一像素晶体管区域pa33a
‑
1和pa34a
‑
1中包括的第一晶体管组可以设置为使得复位晶体管的第一端子1940接近像素p33的第四顶点区域。
[0225]
此外,第一像素晶体管区域pa23a
‑
2和pa24a
‑
2中包括的第二晶体管组可以设置为使得驱动晶体管的第一端子2030接近像素p23的第二顶点区域,并且第一像素晶体管区域pa33a
‑
2和pa34a
‑
2中包括的第二晶体管组可以设置为使得驱动晶体管的第一端子2030接近像素p33的第四顶点区域。
[0226]
尽管以上仅作为示例描述了各种特定的实施方式,但是基于本专利文档中公开和示出的内容可以对所公开的实施方式和其它实施方式进行变型。
[0227]
相关申请的交叉引用
[0228]
本专利文档要求于2020年5月25日提交的韩国专利申请no.10
‑
2020
‑
0062199的优先权和利益,该韩国专利申请的公开内容通过引用整体合并于本文中,作为本专利文档的一部分。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。