1.本实用新型属于太阳能光伏板技术领域,特别涉及一种智能越障的太阳能光伏板清扫装置。
背景技术:
2.目前,随着光伏发电行业的高速发展,光伏发电产业以其环保、能源质量高等优点,已成为国内外发电行业的一种趋势。太阳能电池板是太阳能电站产生电能的根源,光伏组件转化太阳能的效率直接决定着太阳能电站的发电量,灰尘污染和组件故障是影响光伏发电运行效率的主要原因,其直接影响到光伏发电的经济效益和运行寿命。
3.光伏板清扫装置应运而生,深受市场青睐,但是也面临着一些问题,由于受安装环境以及安装水平、安装误差以及长时间自然滑动的影响,相邻光伏板的连接处会出现一定程度的错位现象,会影响行走小车自动运行,甚至导致无法运行,严重影响了清扫设备的正常运行,不仅会大大提高了维护成本,还对安装时的精度要求很高,避免出现稍大尺寸的错位,因此安装工时也较长。
技术实现要素:
4.本实用新型提供一种智能越障的太阳能光伏板清扫装置,可以解决背景技术中所指出的问题。
5.一种智能越障的太阳能光伏板清扫装置,包括置于太阳能光伏板上的行走小车,所述行走小车包括车体、行走动力轮总成以及驱动机构,所述驱动机构驱动行走动力轮总成转动,以使行走小车沿太阳能光伏板表面往复运动,所述车体的两侧各设有若干个纵向滚轮以及横向滚轮,所述纵向滚轮和所述横向滚轮分别通过往复驱动机构驱动其往复运动,所述车体的两侧各设有感应探头,所述感应探头用于感应错位及障碍,所述感应探头与控制系统连接,所述控制系统控制相应往复驱动机构动作。
6.优选的,所述往复驱动机构包括驱动元件以及往复滑动体,所述往复滑动体滑动连接在所述车体上,所述纵向滚轮以及横向滚轮分别对应固定在相应的往复滑动体上,所述驱动元件驱动往复滑动体往复运动,从而带动相应的纵向滚轮活横向滚轮往复运动。
7.优选的,所述驱动元件为减速电机,所述往复滑动体为滑动连杆,所述减速电机通过丝杆驱动滑动连杆往复运动,所述滑动连杆的两端滑动连接在所述车体上,所述车体对应位置分别设有与滑动连杆两端配合的长形滑动孔,所述滑动连杆一端对应固定纵向滚轮或横向滚轮,另一端设有螺母限位固定。
8.优选的,所述感应探头为红外感应探头,所述红外感应探头分别位于车体的两侧,且车体行走的前后两端各设有红外感应探头,所述红外感应探头具有两个感应端,其分别用于感应相邻光伏板间的横向凸起以及纵向凸起。
9.优选的,所述行走小车为智能清扫小车,其包括清扫总成,所述清扫总成包括清扫毛刷以及清扫动力轴,清扫毛刷套装在所述清扫动力轴上,所述清扫动力轴的两端转动连
接在车体,通过驱动机构驱动清扫动力轴转动,使清扫毛刷进行清扫工作。
10.优选的,所述行走动力轮总成包括若干组行走动力轮以及行走传动轴,若干组行走动力轮沿所述车体的宽度方向分布,同一组行走动力轮包含至少两个行走动力轮,其沿所述车体的长度方向分布,并通过行走传动轴连接,通过驱动机构驱动行走传动轴转动,使行走动力轮行走。
11.优选的,所述驱动机构为驱动电机,其通过传动系统驱动清扫动力轴以及驱动传动轴转动,所述传动系统位于车体一侧。
12.优选的,所述传动系统为链传动或齿轮传动。
13.优选的,所述行走小车上设有控制器以及传输天线,通过所述传输天线与远程控制系统相连接。
14.优选的,所述行走小车上设有光伏板,所述光伏板为装置提供电能。
15.有益效果:本实用新型为一种智能越障的太阳能光伏板清扫装置,在智能清扫小车的基础上增加越障功能,使其在遇到错位障碍时,能够自动越过,其运行不会受到影响,会大大降低维护成本,此外,对安装精度要求也会相应降低,能够减少施工时常。
附图说明
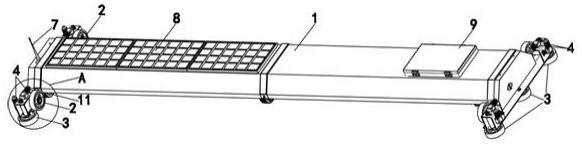
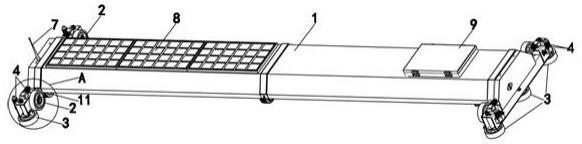
16.图1为本实用新型结构示意图,
17.图2为本实用新型图1中a处的放大示意图,
18.图3为本实用新型主视示意图,
19.图4为本实用新型图2中b处的放大示意图,
20.图5为本实用新型侧面示意图,
21.图6为本实用新型一侧结构示意图图一,
22.图7为本实用新型一侧结构示意图图二,
23.图8为本实用新型工作示意图,
24.附图标记说明:
25.图中标号:行走小车1;行走动力轮11;车体12;纵向滚轮2;横向滚轮3;往复驱动机构4;驱动元件41;往复滑动体42;长形滑动孔43;螺母44;丝杆45;感应探头5;感应端51;清扫毛刷61;传输天线7;光伏板8;控制器9;传动系统10。
具体实施方式
26.下面结合附图,对本实用新型的一个具体实施方式进行详细描述,但应当理解本实用新型的保护范围并不受具体实施方式的限制。
27.实施例1:
28.如图1
‑
8所示,本实用新型实施例提供的一种智能越障的太阳能光伏板清扫装置,包括置于太阳能光伏板上的行走小车1,所述行走小车1包括车体12、行走动力轮总成以及驱动机构,所述驱动机构驱动行走动力轮总成转动,以使行走小车沿太阳能光伏板表面往复运动,所述车体12的两侧各设有若干个纵向滚轮2以及横向滚轮3,所述纵向滚轮2和所述横向滚轮3分别通过往复驱动机构4驱动其往复运动,所述车体12的两侧各设有感应探头5,所述感应探头5用于感应错位及障碍,所述感应探头5可选用红外感应探头,所述红外感应
探头分别位于车体12的两侧,且车体12行走的前后两端各设有红外感应探头,所述红外感应探头具有两个感应端51,其分别用于感应相邻光伏板间的横向凸起以及纵向凸起,其中一个感应端51朝向行走方向,其感应光伏板的侧边,另一个感应端51朝向内侧,其余车体12平行,用于感应光伏板的上边,所述感应探头5与控制系统连接,所述控制系统控制相应往复驱动机构4动作。
29.具体的,所述往复驱动机构4包括驱动元件41以及往复滑动体42,所述往复滑动体42滑动连接在所述车体12上,所述纵向滚轮2以及横向滚轮3分别对应固定在相应的往复滑动体42上,所述驱动元件41驱动往复滑动体42往复运动,从而带动相应的纵向滚轮2活横向滚轮3往复运动。所述驱动元件41为减速电机,减速电机可选用蜗轮蜗杆减速电机,所述往复滑动体42为滑动连杆,所述减速电机通过丝杆45驱动滑动连杆往复运动,滑动连杆中心处设有与丝杆45配合的丝杆孔,所述滑动连杆的两端滑动连接在所述车体12上,所述车体12对应位置分别设有与滑动连杆两端配合的长形滑动孔43,所述滑动连杆一端对应固定纵向滚轮2或横向滚轮3,另一端设有螺母44限位固定。
30.具体的,所述行走小车为智能清扫小车,其包括清扫总成,所述清扫总成包括清扫毛刷61以及清扫动力轴,清扫毛刷61套装在所述清扫动力轴上,所述清扫动力轴的两端转动连接在车体12,通过驱动机构驱动清扫动力轴转动,使清扫毛刷61进行清扫工作。
31.具体的,所述行走动力轮总成包括若干组行走动力轮11以及行走传动轴,若干组行走动力轮11沿所述车体12的宽度方向分布,同一组行走动力轮11包含至少两个行走动力轮11,其沿所述车体12的长度方向分布,并通过行走传动轴连接,通过驱动机构驱动行走传动轴转动,使行走动力轮11行走,所述驱动机构为驱动电机,其通过传动系统10驱动清扫动力轴以及驱动传动轴13转动,所述传动系统10位于车体12一侧,所述传动系统10为链传动或齿轮传动。
32.所述行走小车1上设有控制器9以及传输天线7,通过所述传输天线7与远程控制系统相连接。
33.所述行走小车1上设有光伏板8,所述光伏板8为装置提供电能。
34.本实用新型的工作原理:行走小车1运行,当感应探头5其中一个感应端51感应到光伏板侧边有错位凸起时,控制系统会控制相应的往复驱动机构4动作,带动横向滚轮3向外侧移动,从而能够顺利经过错位凸起点,当此感应端51感应不到错位凸起后,控制系统会控制相应的往复驱动机构4延时一般延时几秒即可回位,同理,当应探头5其中另一一个感应端51感应到光伏板上边有错位凸起时,控制系统会控制相应的往复驱动机构4动作,带动纵向滚轮2向外侧移动,从而能够顺利经过错位凸起点,当此感应端51感应不到错位凸起后,控制系统会控制相应的往复驱动机构4延时一般延时几秒即可回位。
35.以上公开的仅为本实用新型的几个具体实施例,但是,本实用新型实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。