1.本实用新型涉及户外扫地机器人领域,尤其涉及一种具有麦克风防水功能的扫地机器人。
背景技术:
2.扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。一般来说,将完成清扫、吸尘、擦地工作的机器人,也统一归为扫地机器人。随着功能型机器人技术越来越发达,很多扫地机器人都在原有的基础上增加人机交互功能,目的是为了在使用过程中使用者可以通过简单的语句与扫地机器人交流沟通。
3.当扫地机器人在户外作业,遇到下雨时,雨水容易从麦克风通孔进入至扫地机器人内部,这样一来就扫地机器人的麦克风极易损毁。
4.因此,有必要提供一种具有麦克风防水功能的扫地机器人解决上述技术问题。
技术实现要素:
5.为此,需要提供一种具有麦克风防水功能的扫地机器人,防止雨水从所述麦克风通孔进入,损毁所述麦克风。
6.为实现上述目的,本技术提供了一种具有麦克风防水功能的扫地机器人,包括:雨量检测器、麦克风、麦克风通孔、遮挡板、动力机构和扫地机器人本体;
7.所述雨量检测器置于所述扫地机器人本体外表面;所述扫地机器人本体上设置有麦克风通孔,所述麦克风置于所述扫地机器人本体内,且所述麦克风置于所述麦克风通孔一侧;所述动力机构置于所述扫地机器人本体上,所述动力机构与所述遮挡板传动连接,所述动力机构用于驱动所述遮挡板移动;
8.当所述雨量检测器检测到的雨量大于预设雨量值时,所述遮挡板置于所述麦克风与所述麦克风通孔之间。
9.进一步地,所述雨量检测器置于所述扫地机器人本体顶部。
10.进一步地,所述动力机构包括:第一电机、第一齿轮和齿条;
11.所述第一电机固定于所述扫地机器人本体内,所述第一齿轮套设于所述第一电机的输出端;所述齿条与所述扫地机器人本体滑动连接,且所述齿条与所述遮挡板连接;所述第一齿轮与所述齿条相互啮合。
12.进一步地,所述遮挡板的旋转中心设置于所述麦克风通孔的一侧,所述遮挡板上设置有齿,且所述遮挡板上包括遮挡区域和通孔区域,所述通孔区域与所述麦克风通孔适配,所述齿置于所述遮挡板边缘;
13.所述动力机构包括:第二电机和第二齿轮;所述第二电机固定于所述扫地机器人本体内,所述第二齿轮套设于所述第二电机的输出端;所述齿与所述第二齿轮啮合。
14.进一步地,还包括:限位凸块和限位柱;所限位柱置于所述遮挡板一侧,所述限位凸块为两个,且两个所述限位凸块置于所述遮挡板边缘;所述限位柱置于两个所限位凸块之间。
15.进一步地,所述动力机构为电动推杆,电动推杆的伸缩端与所述遮挡板连接。
16.进一步地,还包括:控制单元;所述雨量检测器以及动力机构与所述控制单元电连接。
17.区别于现有技术,上述技术方案通过所述雨量检测器、麦克风、麦克风通孔、遮挡板以及动力机构的设置,防止雨水进入至所述麦克风内,损毁麦克风;同时提高了扫地机器人的使用寿命。
附图说明
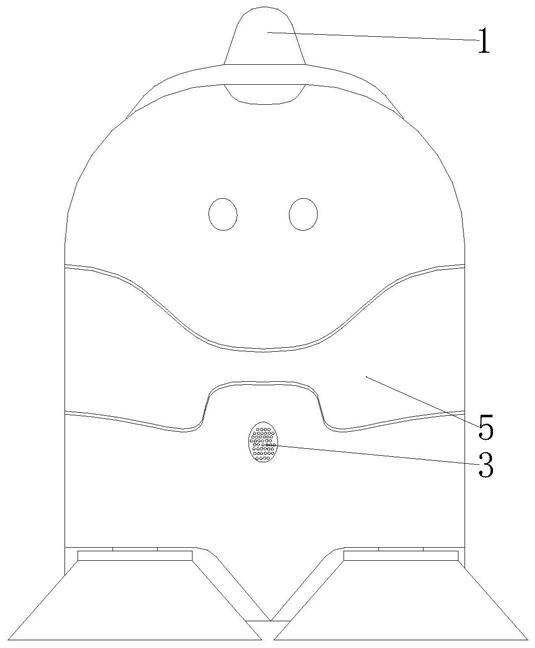
18.图1为所述一种具有麦克风防水功能的扫地机器人主视图;
19.图2为具所述一种具有麦克风防水功能的扫地机器人侧视图;
20.图3为所述第一电机、第一齿轮和齿条结构图;
21.图4为所述通孔区域和麦克风通孔位置关系示意图;
22.图5为所述第二电机、第二齿轮和齿结构图。
23.附图标记说明:
24.1、雨量检测器;2、麦克风;3、麦克风通孔;4、遮挡板;5、扫地机器人本体;
25.61、第一电机;62、第一齿轮;63、齿条;
26.64、第二电机;65、第二齿轮;66、限位凸块;67、限位柱;68、齿;69、通孔区域。
具体实施方式
27.为详细说明技术方案的技术内容、构造特征、所实现目的及效果,以下结合具体实施例并配合附图详予说明。
28.请参阅图1至图5,本技术提供了一种具有麦克风2防水功能的扫地机器人,包括:雨量检测器1、麦克风2、麦克风通孔3、遮挡板4、动力机构和扫地机器人本体5;所述雨量检测器1置于所述扫地机器人本体5外表面;所述扫地机器人本体5上设置有麦克风通孔3,所述麦克风2置于所述扫地机器人本体5内,且所述麦克风2置于所述麦克风通孔3一侧;所述动力机构置于所述扫地机器人本体5上,所述动力机构与所述遮挡板4传动连接,所述动力机构用于驱动所述遮挡板4移动;当所述雨量检测器1检测到的雨量到达预设雨量值时,所述遮挡板4置于所述麦克风2与所述麦克风通孔3之间。所述扫地机器人本体5将空间分为内外两个部分。
29.需要说明的是,所述雨量检测器1置于所述扫地机器人本体5外部,便于所述雨量检测器1更为精确的监测是否下雨;当然,所述雨量监测装置可以为多个,且多个所述雨量监测器均置于所述扫地机器人上,便于更精确的监测雨量。在某些实施例中,所述雨量检测器1置于所述扫地机器人顶部,增大所述雨量检测器1监测的监测面积,使所述雨量检测器1在下雨初期便可检测雨水。
30.需要说明的是,所述麦克风2置于所述麦克风通孔3远离外部的一侧;即,所述麦克风2置于所述机器人本体内部,且所述麦克风2位于所述麦克风通孔3一侧;进一步的,所述
麦克风2与所述麦克风通孔3间具有容置所述遮挡板4的间隙,便于所述遮挡板4的移动。
31.还需要说明的是,所述动力机构固定于所述扫地机器人内壁上,且所述动力机构置于所述麦克风通孔3一侧;所述动力机构用于驱动所述遮挡板4的移动。具体的,当所述雨量检测器1监测雨量大于预设雨量值时,所述动力机构将驱动所述遮挡板4向间隙处移动,将所述麦克与所述麦克风通孔3隔开,防止雨水入侵所述麦克风2;同理,当所述雨量检测器1监测雨量下雨预设雨量值时,所述动力机构将驱动所述遮挡板4向远离间隙的方向移动,使所述麦克风2与所述麦克风通孔3将没有阻挡物,便于声音的传入。还需要进一步说明的是,预设雨量值是判断所述动力机构是否驱动所述遮挡板4的依据,优选的,预设雨量值为零。
32.上述技术方案通过所述雨量检测器1、麦克风2、麦克风通孔3、遮挡板4以及动力机构的设置,防止雨水进入至所述麦克风2内,损毁麦克风2;同时提高了扫地机器人的使用寿命。
33.请参阅图3,在本实施例中,所述动力机构包括:第一电机61、第一齿轮62和齿条63;所述第一电机61固定于所述扫地机器人本体5内,所述第一齿轮62套设于所述第一电机61的输出端,所述齿条63与所述遮挡板4连接,所述第一齿轮62与所述齿条63相互啮合。
34.需要说明的是,所述齿条63通过滑轨与所述扫地机器人本体5内壁滑动连接;具体的,滑轨的滑槽固定于所述扫地机器人本体5内壁上,所述齿条63上设置有滑块,当所述第一电机61驱动所述齿条63移动时,所述齿条63上的滑块将沿滑槽滑动。在实际使用中,当所述雨量检测器1监测雨量大于预设雨量值时,所述第一电机61将驱动所述第一齿轮62转动,从而带动所述齿条63移动,此时所述遮挡板4向所述麦克风2与麦克风通孔3之间的间隙移动将所述麦克与所述麦克风通孔3隔开,防止雨水入侵所述麦克风2;同理,当所述雨量检测器1监测雨量下雨预设雨量值时,所述动力机构将驱动所述遮挡板4向远离间隙的方向移动。
35.请参阅图4至图5,在本实施例中,所述遮挡板4可转动设置于所述麦克风通孔3的一侧,所述遮挡板4上设置有齿68,且所述遮挡板4包括遮挡区域和通孔区域69,所述通孔区域69与所述麦克风通孔3适配,所述齿68置于所述遮挡板4边缘;所述动力机构包括:第二电机64和第二齿轮65;所述第二电机64固定于所述扫地机器人本体5内,所述第二齿轮65套设于所述第二电机64的输出端;所述齿68与所述第二齿轮65啮合。
36.需要说明的是,所述遮挡板4可绕自身的旋转中心旋转,且旋转中心置于所述麦克风通孔3的一侧;所述第二齿轮65与所述遮挡板4上的所述齿68相互啮合,便于所述第二齿轮65驱动所述遮挡板4转动。
37.还需要说明的是,所述遮挡板4上仅分为遮挡区域和通孔区域69,所述遮挡区域用于将所述麦克风2和麦克风通孔3隔开,所述通孔区域69将确保声音通过所述麦克风通孔3清楚的传至所述麦克风2内。所述通孔区域69置于所述遮挡板4上,且所述通孔区域69的大小形状与所述麦克风通孔3相互适配;具体的,当所通孔区域69旋转至所述麦克风2与所述麦克风通孔3之间时,所述麦克风2与麦克风通孔3之间没有阻挡物体,声音将通过麦克风通孔3直接传至所述麦克风2上;但当所述遮挡区域置于所述麦克风2与所述麦克风通孔3之间时,雨水将被所述遮挡区域阻隔,阻止雨水侵入所述麦克风2。
38.在实际作业中,当所述雨量检测器1监测雨量大于预设雨量值时,所述第二电机64
将通过所述齿68驱动所述遮挡板4转动,使所述遮挡板4上的所述遮挡区域置于所述麦克风2与所述麦克风通孔3之间,此时所述遮挡区域将所述麦克风2与麦克风通孔3隔开,以确保雨水不会流进所述麦克风2内;同理,当所述雨量检测器1监测雨量下雨预设雨量值时,所述动力机构将驱动所述遮挡板4转动,此时所述通孔区域69置于所述麦克风2与麦克风通孔3之间,以确保声音可以正常传入到所述麦克风2上。
39.请参阅图4,为防止所述遮挡板4旋转过位,在本实施例中,还包括:限位凸块66和限位柱67;所限位柱67置于所述遮挡板4一侧,所述限位凸块66为两个,且两个所述限位凸块66置于所述遮挡板边缘;所述限位柱67置于两个所限位凸块66之间。需要说明的是,所述限位凸块66之间的距离与所述通孔区域69两端部之间距离相同,且所述限位柱67置于两个所述限位凸块66之间。
40.需要进一步说明的是,当所述通孔区域69置于所述麦克风2以及麦克风通孔3之间时,所述限位柱67与其中一根所述限位凸块66触碰;当所述通孔区域69完全转出所述麦克风2以及麦克风通孔3之间时,所述限位柱67与另一根所述限位凸块66触碰。
41.在本实施例中,所述动力机构还可以为电动推杆;需要说明的是,电动推杆的一端固定于所述扫地机器人本体5内壁上;所述电动推杆的另一端与所述遮挡板4连接;通过电动推杆驱动所述遮挡板4进入退出所述麦克风2与所述麦克通孔之间的间隙。
42.在本实施例中,还包括:控制单元;所述雨量检测器1、动力机构和麦克风2分别与所述控制单元电连接。需要说明的是,在实际使用中,当所述雨量检测器1监测到雨水时,所述雨量检测器1向所述控制单元发送下雨信号,所述控制单元将向所述动力机构发出闭合所述麦克风通孔3信号,所述动力机构将驱动所述遮挡板4置于所述麦克风2与麦克风通孔3之间。
43.需要说明的是,尽管在本文中已经对上述各实施例进行了描述,但并非因此限制本实用新型的专利保护范围。因此,基于本实用新型的创新理念,对本文所述实施例进行的变更和修改,或利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,直接或间接地将以上技术方案运用在其他相关的技术领域,均包括在本实用新型专利的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。