1.本实用新型属于训练装置技术领域,尤其是涉及一种智能躲闪拳靶。
背景技术:
2.随着人们生活水平的提高,人们追求健康高质量的生活,拳击训练不仅可以提升使用者的身体素质,还能有效地提高使用者的拳击反应能力,因此拳靶是拳击使用者经常使用的训练器材。但是目前的拳靶还存在一些问题:
3.目前的拳靶一般为吊带,拳击速度球,仿人固定拳靶,贴墙拳靶。但是这些训练拳靶都是被动击打,不会自动躲闪,从而不能有效地提高使用者的出拳速度。
4.因此,现如今缺少一种结构简单,设计合理的智能躲闪拳靶,能自动躲闪,人机互动,不仅可以训练出拳速度,提高使用者的拳击水平,而且能辅助使用者锻炼身体。
技术实现要素:
5.本实用新型所要解决的技术问题在于针对上述现有技术中的不足,提供一种智能躲闪拳靶,其结构简单,设计合理,能自动躲闪,人机互动,不仅可以训练出拳速度,提高使用者的拳击水平,而且能辅助使用者锻炼身体,实用性强。
6.为解决上述技术问题,本实用新型采用的技术方案是:一种智能躲闪拳靶,其特征在于:包括壳体和设置在所述壳体内的躲闪拳靶部件,所述躲闪拳靶部件包括伸出壳体顶部的拳靶和设置在壳体中且带动拳靶摆动的摆动机构,所述壳体上设置有右接近开关和左接近开关,所述摆动机构带动拳靶左右摆动以躲闪使用者。
7.上述的一种智能躲闪拳靶,其特征在于:所述壳体的底部设置有旋转机构,所述旋转机构带动所述壳体和所述躲闪拳靶部件旋转;
8.所述旋转机构的底部设置有配重机构,所述配重机构为水箱。
9.上述的一种智能躲闪拳靶,其特征在于:所述旋转机构包括设置在所述水箱顶部的支撑板、安装在支撑板中心位置的旋转电机和与旋转电机的输出轴传动连接的旋转盘;
10.所述旋转盘和支撑板之间设置有限位垫环,所述限位垫环的中心位置设置有供旋转电机安装的容纳孔,所述旋转盘的底部设置有凸环,所述限位垫环的顶部设置有与凸环配合的凹槽。
11.上述的一种智能躲闪拳靶,其特征在于:所述水箱的底部设置有底座,所述底座的底部设置有行走机构,所述行走机构包括轮座和设置在轮座上的万向轮,所述轮座安装在底座底部;
12.所述水箱安装在底座上,所述底座上设置有对水箱四周固定的立柱,所述立柱的顶部和水箱的顶部相齐平,所述水箱上设置有盖塞,所述盖塞和水箱螺纹连接。
13.上述的一种智能躲闪拳靶,其特征在于:所述壳体内设置有控制箱,所述控制箱内设置有电子线路板,所述电子线路板上集成有微控制器,所述右接近开关和左接近开关的输出端均与微控制器的输入端连接。
14.上述的一种智能躲闪拳靶,其特征在于:所述壳体上设置有第一按键、第二按键和显示屏,所述第一按键、第二按键的输出端均与微控制器的输入端连接,所述显示屏由微控制器控制。
15.上述的一种智能躲闪拳靶,其特征在于:所述摆动机构为摆动电机,所述摆动电机通过连杆部件带动拳靶左右摆动以躲闪使用者;
16.所述连杆部件包括从下至上依次连接的下连接杆、上连接杆和弹簧,所述拳靶的底部和弹簧的顶部固定连接,所述下连接杆与摆动电机的输出轴传动连接。
17.上述的一种智能躲闪拳靶,其特征在于:所述上连接杆的底部开设有供下连接杆的下端伸入的容纳槽,所述上连接杆的底部和下连接杆伸入所述容纳槽的端部穿设有连接轴,所述连接轴的两端套设有锁紧螺母,所述锁紧螺母贴合上连接杆。
18.本实用新型与现有技术相比具有以下优点:
19.1、本实用新型设置摆动机构,摆动机构带动拳靶左右摆动以躲闪使用者,以使拳靶主动躲闪,便于人机互动。
20.2、本实用新型设置右接近开关和左接近开关,是为了适应使用者的右手臂和左手臂击打拳靶,通过感应使用者的右手臂和左手臂,从而以使拳靶左右摆动以躲闪使用者,不仅可以训练出拳速度,提高使用者的拳击水平,而且能辅助使用者锻炼身体。
21.3、本实用新型不仅可以作为训练锻炼器件,还可用于娱乐,环节精神压力,适应范围广。
22.综上所述,本实用新型结构简单,设计合理且成本低,能自动躲闪,人机互动,不仅可以训练出拳速度,提高使用者的拳击水平,而且能辅助使用者锻炼身体,实用性强。
23.下面通过附图和实施例,对本实用新型的技术方案做进一步的详细描述。
附图说明
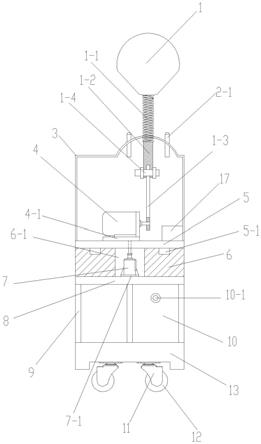
24.图1为本实用新型的结构示意图。
25.图2为图1除去行走机构后的右视图。
26.图3为本实用新型的电路原理框图。
27.附图标记说明:
28.1—拳靶;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ1‑
1—弹簧;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ1‑
2—上连接杆;
[0029]1‑
3—下连接杆;
ꢀꢀꢀꢀꢀꢀꢀꢀ1‑
4—连接轴;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2‑
1—右接近开关;
[0030]2‑
2—左接近开关;
ꢀꢀꢀꢀꢀꢀ
3—壳体;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4—摆动电机;
[0031]4‑
1—电机座;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5—旋转盘;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ5‑
1—凸环;
[0032]
6—限位垫环;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ6‑
1—容纳孔;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
7—旋转电机;
[0033]7‑
1—l形座;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8—支撑板;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
9—立柱;
[0034]
10—水箱;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10
‑
1—盖塞;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11—轮座;
[0035]
12—万向轮;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
13—底座;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14—显示屏;
[0036]
15—第一按键;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
16—第二按键;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
17—控制箱;
[0037]
18—微控制器;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
19—摆动电机驱动模块;
[0038]
20—旋转电机驱动模块。
具体实施方式
[0039]
如图1和图2所示,本实用新型包括壳体3和设置在所述壳体3内的躲闪拳靶部件,所述躲闪拳靶部件包括伸出壳体3顶部的拳靶1和设置在壳体3中且带动拳靶1摆动的摆动机构,所述壳体3上设置有右接近开关2
‑
1和左接近开关2
‑
2,所述摆动机构带动拳靶1左右摆动以躲闪使用者。
[0040]
本实施例中,所述壳体3的底部设置有旋转机构,所述旋转机构带动所述壳体3和所述躲闪拳靶部件旋转;
[0041]
所述旋转机构的底部设置有配重机构,所述配重机构为水箱10。
[0042]
本实施例中,所述旋转机构包括设置在所述水箱10顶部的支撑板8、安装在支撑板8中心位置的旋转电机7和与旋转电机7的输出轴传动连接的旋转盘5;
[0043]
所述旋转盘5和支撑板8之间设置有限位垫环6,所述限位垫环6的中心位置设置有供旋转电机7安装的容纳孔6
‑
1,所述旋转盘5的底部设置有凸环5
‑
1,所述限位垫环6的顶部设置有与凸环5
‑
1配合的凹槽。
[0044]
本实施例中,所述水箱10的底部设置有底座13,所述底座13的底部设置有行走机构,所述行走机构包括轮座11和设置在轮座11上的万向轮12,所述轮座11安装在底座13底部;
[0045]
所述水箱10安装在底座13上,所述底座13上设置有对水箱10四周固定的立柱9,所述立柱9的顶部和水箱10的顶部相齐平,所述水箱10上设置有盖塞10
‑
1,所述盖塞10
‑
1和水箱10螺纹连接。
[0046]
如图3所示,本实施例中,所述壳体3内设置有控制箱17,所述控制箱17内设置有电子线路板,所述电子线路板上集成有微控制器18,所述右接近开关2
‑
1和左接近开关2
‑
2的输出端均与微控制器18的输入端连接。
[0047]
本实施例中,所述壳体3上设置有第一按键15、第二按键16和显示屏14,所述第一按键15、第二按键16的输出端均与微控制器18的输入端连接,所述显示屏14由微控制器18控制。
[0048]
本实施例中,所述摆动机构为摆动电机4,所述摆动电机4通过连杆部件带动拳靶1左右摆动以躲闪使用者;
[0049]
所述连杆部件包括从下至上依次连接的下连接杆1
‑
3、上连接杆1
‑
2和弹簧1
‑
1,所述拳靶1的底部和弹簧1
‑
1的顶部固定连接,所述下连接杆1
‑
3与摆动电机4的输出轴传动连接。
[0050]
本实施例中,所述上连接杆1
‑
2的底部开设有供下连接杆1
‑
3的下端伸入的容纳槽,所述上连接杆1
‑
2的底部和下连接杆1
‑
3伸入所述容纳槽的端部穿设有连接轴1
‑
4,所述连接轴1
‑
4的两端套设有锁紧螺母,所述锁紧螺母贴合上连接杆1
‑
2。
[0051]
本实施例中,所述摆动电机4通过电机座4
‑
1安装在旋转盘5上,所述旋转电机7通过l形座7
‑
1安装在支撑板8上。
[0052]
本实施例中,设置水箱10,是为了配重,通过盖塞10
‑
1为水箱10中装满水,从而增加该智能躲闪拳靶的底盘重量,提高了其整体的稳定性;当需要搬运该智能躲闪拳靶时,操作盖塞10
‑
1,将水箱10中的水排出,减轻自动,以使搬运方便。
[0053]
本实施例中,所述微控制器18的输出端连接有旋转电机驱动模块20,旋转电机7和
旋转电机驱动模块20连接;所述微控制器18的输出端连接有摆动电机驱动模块19,所述摆动电机4与摆动电机驱动模块19连接。
[0054]
本实施例中,实际使用时,所述右接近开关2
‑
1和左接近开关2
‑
2的数量分别为多个,还可以可倾斜布设,覆盖使用者的拳击手臂盲区。
[0055]
本实施例中,所述右接近开关2
‑
1和左接近开关2
‑
2均可参考m12光电开关。
[0056]
本实施例中,右接近开关2
‑
1和左接近开关2
‑
2的输出端均与微控制器18的io引脚连接。
[0057]
本实施例中,所述微控制器18为stc12c5a48s2单片机或者stm32f103vet6微控制器。
[0058]
本实施例中,所述第一按键15和第二按键16与微控制器18连接参考本领域技术人员熟悉的连接。
[0059]
本实施例中,所述显示屏14为zx12232c显示屏,zx12232c显示屏和微控制器18的连接参考本领域技术人员熟悉的连接。
[0060]
本实施例中,摆动电机驱动模块19和旋转电机驱动模块20均可参考86步进电机驱动器。
[0061]
本实施例中,摆动电机4和旋转电机7均可参考型号为86步进电机。实际使用时,还可采用其他能实现同样功能的电机,摆动电机4和摆动电机驱动模块19的连接以及旋转电机7和旋转电机驱动模块20的连接参考本领域技术人员熟悉的连接。
[0062]
本实用新型具体使用时,操作第一按键15,微控制器18工作,该智能躲闪拳靶进入训练状态,在使用者的右手臂击打拳靶1时,当右接近开关2
‑
1感应到右手臂,则右接近开关2
‑
1输出信号至微控制器18,微控制器18接收到右接近开关2
‑
1的信号由高电平转换为低电平时或者低电平转换为高电平时,微控制器18通过摆动电机驱动模块19控制摆动电机4转动,摆动电机4转动通过下连接杆1
‑
3、上连接杆1
‑
2和弹簧1
‑
1带动拳靶1向左摆动;
[0063]
当左接近开关2
‑
2感应到左手臂,则左接近开关2
‑
2输出信号至微控制器18,微控制器18接收到左接近开关2
‑
2的信号由高电平转换为低电平时或者低电平转换为高电平时,微控制器18通过摆动电机驱动模块19控制摆动电机4反向转动,摆动电机4转动通过下连接杆1
‑
3、上连接杆1
‑
2和弹簧1
‑
1带动拳靶1向右摆动,从而带动拳靶1躲闪使用者,以便于人机互动,不仅可以训练出拳速度,提高使用者的拳击水平,而且能辅助使用者锻炼身体。
[0064]
在智能躲闪拳靶使用的过程中,当需要调节拳靶1的位置时,则操作第二按键16,微控制器18通过旋转电机驱动模块20控制旋转电机7转动,旋转电机7转动带动旋转盘5转动,旋转盘5转动带动拳靶机构旋转,直至调节拳靶1为使用者适合的位置。
[0065]
本实用新型结构简单,设计合理且成本低,能自动躲闪,人机互动,不仅可以训练出拳速度,提高使用者的拳击水平,而且能辅助使用者锻炼身体,实用性强。
[0066]
以上所述,仅是本实用新型的较佳实施例,并非对本实用新型作任何限制,凡是根据本实用新型技术实质对以上实施例所作的任何简单修改、变更以及等效结构变化,均仍属于本实用新型技术方案的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。