1.本发明涉及测量技术领域,具体涉及一种便携式河床空间坐标自动采集器。
背景技术:
2.在土木水利工程项目建设中,常常需要对河流进行水文调查,在获取河流的相关测量信息后,可进行河道防洪治理、桥梁施工、河底管线施工等工程施工。故河床断面的测量是水文调查工作的一项重要内容,在常规的中小型河床断面测量工程中,通常采用的测量方法是测量人员驾驶船只至指定测量点,将棱镜杆或者rtk移动站测杆的底部放置在河床顶面进行定点测绘。该测量过程误差较大,人为因素较多,测量结果的客观性存在不足,且测量人员在水面测量作业中安全性很难得到充分保证。
技术实现要素:
3.为了克服上述现有技术存在的缺陷,本发明提供了一种便携式河床空间坐标自动采集器,通过平面坐标采集模块及水下高程采集模块,组成一个三维空间坐标采集器,对中小型河床断面进行测量,并通过demo软件对河床空间坐标的数据可视化,并自动绘制河床断面图进行保存;能够避免传统野外测量人员在水文测量中不可预见的危险性,使测量工作简单化和高效化,减少数据的冗错率。
4.为了实现上述目的,本发明通过以下技术方案实现:
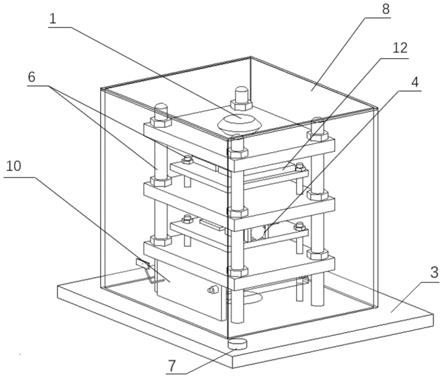
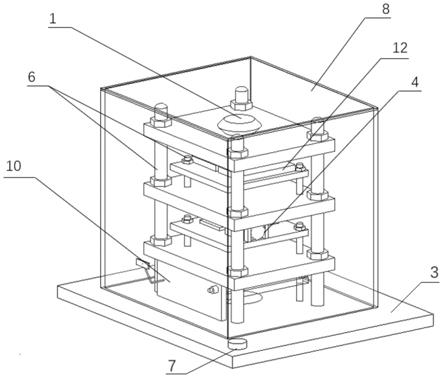
5.一种便携式河床空间坐标自动采集器,包括浮力板3,浮力板3顶部设有防水外壳8,防水外壳8内设有安装架6,电源12、控制模块9、平面坐标采集模块1、无线通讯模块10、数据存储模块2及数据修正模块11分别安装于安装架6上,浮力板3底部安装有水下高程采集模块5及动力模块13。
6.所述电源12用于给装置供电,控制模块9的信号接收端分别与平面坐标采集模块1及水下高程采集模块5的信号输出端相连接,控制模块9的信号输出端分别与数据存储模块2、数据修正模块11及动力模块13的信号输入端相连接,数据存储模块2的信号输出端通过无线通讯模块10与远程服务器的信号输入端相连接,远程服务器通过demo软件对平面坐标采集模块1及水下高程采集模块5采集的空间坐标数据进行数据包抓取、数据解析、读取、修正坐标值、储存和数据可视化,之后将数据转换成图像进行存储。
7.所述控制模块9采用stm32芯片开发板。
8.所述平面坐标采集模块1包括gnss
‑
rtk定位模块和浮力板3顶部设置的水准泡7,采用大地坐标系对测量点进行平面坐标数据采集及平面定位。
9.所述水下高程采集模块5采用超声波传感器,对河床水深进行测量。
10.所述动力模块13包括遥控器,遥控器的信号输出端与电子接收器13
‑
1的信号输入端相连接,电子接收器13
‑
1的信号输出端分别与舵机控制器及电动马达控制器的信号输入端相连接,舵机控制器的控制端控制舵机13
‑
3动力输出轴转动,舵机13
‑
3的动力输出轴通过联轴器及轴承与方向板13
‑
5相连接,调控浮力板3的移动方向;电动马达控制器的控制端
控制电动马达13
‑
2转动,电动马达13
‑
2的动力输出轴通过联轴器及轴承与螺旋桨13
‑
4相连接,带动螺旋桨13
‑
4旋转,从而控制浮力板3前进或后退,遥控器手动物理按键控制动力模块13运动,进行水文测量。
11.所述数据存储模块2采用sd存储卡;所述远程服务器包括计算机、手机。
12.所述数据修正模块11包括磁敏角度传感器。
13.所述的无线通讯模块10采用wifi集成模块,内置lora、网口、4g和5g接口模式。
14.所述数据修正模块11进行误差修正方法为:
15.所述水下高程采集模块5在量取河面至河床的距离时,有:
[0016][0017]
其中,h
′
为水下高程采集模块5实际量取深度的水下高程值,h为修正后水下高程值,θ为磁敏角度传感器采集的角度偏离值;将公式1在demo软件中进行编码设置,输入测量数据,软件自动计算出修正后的水下高程值。
[0018]
本发明的有益效果为:
[0019]
1、本发明能够避免传统人工在水文测量中不可预见的危险性,使测量工作简单化和高效化,减少数据的冗错率。
[0020]
2、本发明总质量轻,体积小,便于携带。
[0021]
3、通过平面坐标采集模块1及水下高程采集模块5采集的河床数据精度能达到毫米级。
[0022]
4、通过demo软件自动绘制河床断面图,提高测量内业工作效率。
附图说明
[0023]
图1为本发明的电路连接框图。
[0024]
图2为本发明工作流程图。
[0025]
图3为本发明的软件界面示意图。
[0026]
图4为本发明的轴视图。
[0027]
图5为本发明的右视图。
[0028]
图6为本发明的左视图。
[0029]
图7为本发明的采集器仰视图。
[0030]
图8为本发明的动力模块13的结构示意图。
[0031]
图9为本发明的水深偏差图。
[0032]
图中:1、平面坐标采集模块;2、数据存储模块;3、浮力板;4、接收器;5、水下高程采集模块;6、安装架;7、水准泡;8、外壳;9、控制模块;10、无线通讯模块;11、数据修正模块;12、电源;13、动力模块;14、磁感角度传感器;13
‑
1、电子调速器;13
‑
2、电动机;13
‑
3、舵机;13
‑
4、螺旋桨;13
‑
5、方向板。
具体实施方式
[0033]
下面结合附图,对本发明做进一步详细说明。
[0034]
一种便携式河床空间坐标自动采集器,包括浮力板3,浮力板3顶部设有防水外壳
8,防水外壳8内设有安装架6,电源12、控制模块9、平面坐标采集模块1、无线通讯模块10、数据存储模块2及数据修正模块11分别安装于安装架6上,浮力板3底部安装有水下高程采集模块5与动力模块13。
[0035]
所述电源12用于给装置供电,控制模块9的信号接收端分别与平面坐标采集模块1及水下高程采集模块5的信号输出端相连接,控制模块9的信号输出端分别与数据存储模块2、数据修正模块11及动力模块13的信号输入端相连接,数据存储模块2的信号输出端通过无线通讯模块10与远程服务器的信号输入端相连接,远程服务器通过demo软件对平面坐标采集模块1及水下高程采集模块5采集的空间坐标数据进行数据包抓取、数据解析、读取、修正坐标值、储存和数据可视化,之后将数据转换成图像进行存储。
[0036]
所述控制模块9采用stm32芯片开发板;控制模块9根据远程服务器或物理按键即遥控器指令控制动力模块13的工作状态。
[0037]
所述平面坐标采集模块1包括赫星here3 gnss
‑
rtk定位模块和浮力板3顶部设置的水准泡7,采用大地坐标系对测量点进行平面坐标数据进行采集及平面定位。
[0038]
所述水下高程采集模块5采用超声波传感器,超声波传感器采用欧赛龙500f35tr,测量范围是0.003
‑
10m,频率为500khz,适用于中小型河床水下高程探测。
[0039]
所述动力模块13包括遥控器,遥控器的信号输出端与电子接收器13
‑
1的信号输入端相连接,电子接收器13
‑
1的信号输出端分别与舵机控制器及电动马达控制器的信号输入端相连接,舵机控制器的控制端控制舵机13
‑
3动力输出轴转动,舵机13
‑
3的动力输出轴通过联轴器及轴承与方向板13
‑
5相连接,调控浮力板3的移动方向;电动马达控制器的控制端控制电动马达13
‑
2转动,电动马达13
‑
2的动力输出轴通过联轴器及轴承与螺旋桨13
‑
4相连接,带动螺旋桨13
‑
4旋转,从而控制浮力板3前进或后退。
[0040]
所述数据存储模块2采用sd存储卡。
[0041]
所述数据修正模块11包括磁敏角度传感器。
[0042]
所述防水外壳8与安装架6均可拆卸安装于浮力板3上。
[0043]
所述demo软件采用qt开源通过c 编写,实时捕捉服务端上的测量点空间坐标信息和具有远程设置仪器模块误差修正功能,保证采集数据的真实性。
[0044]
所述的无线通讯模块10采用wifi集成模块,内置lora、网口、4g和5g接口模式。
[0045]
所述远程服务器包括计算机、手机。
[0046]
所述数据修正模块11进行误差修正方法为:
[0047]
所述水下高程采集模块5在量取河面至河床的距离时,有:
[0048][0049]
其中,h
′
为水下高程采集模块5实际量取深度的水下高程值,h为修正后水下高程值,θ为磁敏角度传感器采集的角度偏离值;将公式1在demo软件中进行编码设置,输入测量数据,软件自动计算出修正后的水下高程值。
[0050]
本发明试验数据见下表:
[0051]
表1同一测点水深中的误差
[0052][0053]
表2同一断面不同测点中的误差
[0054][0055]
由表1、表2中试验数据可知,利用水下高程采集模块5超声波传感器进行河床断面的高程测量时,高程测量值的实际中误差不超过10mm,远小于《工程测量规范》(gb50026
‑
2007)关于水深测量误差的要求,可以应用于河床断面的三维坐标测量中。
[0056]
本发明工作原理为:
[0057]
对装置进行组装,将控制模块9和远程服务器共同组成一个局域网,该局域网用于信息的双向传递;超声波探测器用于河床高程的测量;控制模块9捕获超声波传感器采集信息;gnss
‑
rtk用于水平面坐标标定,将平面坐标值与水下高程信息组成一个测量点水下空间坐标:平面坐标为x、y,水下高程信息为z。
[0058]
在进行中小型河床断面测量时,首先对便携式河床空间坐标采集器预调试,将便携式河床空间坐标自动采集器放入水中,接通电源,连接远程服务器,远程服务端进行便携式河床空间坐标自动采集器的范围设置,采集器接收demo软件的误差设置,首次下水试验,同一地点进行5
‑
10次数据测量,进行模块误差均值调整。在控制软件内设置得出的误差均值,从而消除仪器本身的模块误差。然后调整便携式河床空间坐标采集器的采集模式,包括自动连续测深模式、定点手动采集器测深模式和手动物理按键测深模式,按照所选采集模式进行测量作业。远程服务端demo地形图上界面上设置测深线,设置完毕后的测深线发送至便携式河床空间坐标采集器,采集器按预定测深线进行连续测量作业,边移动,边测深,采集器本身进行数据存储备份和通过无线传输模块将三维坐标传送至服务端,服务端的demo软件进行河床空间坐标的数据可视化,并自动绘制河床断面图,进行保存。
[0059]
上述具体实施方式仅是本发明的具体个案,本发明的保护范围包括但不限于上述
具体实施方式的产品形态和式样,所属技术领域的普通技术人员对其所做的适当变化或修饰,皆应落入本发明的专利保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。