用于工件中的缺陷检测的设备及方法
1.本技术是申请日为2015年12月04日,申请号为“201580065271.8”,而发明名称为“用于工件中的缺陷检测的设备、方法及计算机程序产品”的发明专利申请的分案申请。
2.相关申请案的交叉参考
3.本技术案主张2014年12月05日申请的第62/088,284号美国临时申请案及2015年4月28日申请的第62/154,109号美国临时申请案的优先权,所述两个申请案的全部内容以引用的方式并入本文中。
技术领域
4.本发明涉及一种用于工件中的缺陷检测的设备。
5.此外,本发明涉及一种用于工件中的缺陷检测的方法。
6.另外,本发明涉及一种安置于非暂时性计算机可读取媒体上的计算机程序产品,所述产品包括可操作以控制计算机用于在工件中的缺陷检测的计算机可执行过程步骤。
背景技术:
7.举例来说,美国专利案6,339,337b1揭示一种用于半导体芯片的红外射线测试。通过将红外射线照射到半导体芯片的底表面上、接收从接合垫反射的所述红外射线及将所述接合垫的图像显示于监测器上而进行所述测试。从所述红外射线获得的所述图像具有所述接合垫自身或下伏于所述接合垫的硅衬底的部分是否具有缺陷或是否存在所述接合垫相对于凸块的偏移的信息。
8.中国实用新型cn 2791639(y)揭示一种检测装置,其主要用于检测其能带间隙大于1.12ev的半导体材料的内部缺陷。用于检测半导体材料的内部缺陷的所述检测装置由光学显微镜、红外ccd相机、视频电缆、模拟图像监测器、数字图像收集卡、计算机及分析过程及显示软件组成。
9.另外,ep 2 699 071a2揭示一种光电子方法,其用于记录其中红外线扫描系统在飞机中使用的陆地的温度分布的热图式形式。所述设备利用通过窗口而接收热辐射的旋转扫描镜面系统。所述镜面系统具有四个反射侧且通过电动机绕轴旋转。所述辐射由镜面引导到ir透镜且接着到一行光电子接收器元件。所述行接收器元件平行于所述镜面系统的所述旋转轴,每一接收器元件由引线及放大装置个别地连接到数个发光二极管中的对应者。
10.美国专利案8,154,718b2揭示一种分析晶片的微结构化样本的装置。所述装置的目的是增加所述装置的可能使用,即特定来说以表示(例如)在两侧上均被结构化的晶片的结构细节,其因涂层或中间材料是不透明而在vis或uv中不可见。ir光用作反射光同时产生透穿照射(其尤其显著地改进ir图像中的对比度),因此允许所述样本同时以反射或透射ir光及以反射可见光表示。
11.典型缺陷是由切割工艺而产生的侧裂痕或由在所述装置中位于电介质层与硅结构之间的内部应力而产生的嵌入式裂痕。
12.图1展示现有技术方法,其用于通过完成四侧检验或五侧检验而在半导体装置2中
找到侧缺陷9。半导体装置2具有第一侧面31、第二侧面32、第三侧面33、第四侧面34、顶面4及底面5。在图1的设置中,具有透镜7的相机6望向半导体装置2的底面5。镜面8布置成分别与半导体装置2的第一侧面31、第二侧面32、第三侧面33及第四侧面34中的每一者成45度。在图1中,仅展示相对于半导体装置2的第二侧面32及第四侧面34而布置的镜面8。
13.图1的设置经使用以分别获得第一侧面31、第二侧面32、第三侧面33、第四侧面34及底面5的图像10(参见图2)。另外,图1的设置具有显著缺点。底面5视图的光学长度11不同于第一侧面31视图、第二侧面32视图、第三侧面33视图及第四侧面34视图的光学长度12。因此,焦点总是在半导体装置2的底面5上的焦点与分别在第一侧面31、第二侧面32、第三侧面33及第四侧面34上的焦点之间的折衷。另外,所述四侧视图的图像分辨率要求大视域且此将限制可使用的像素分辨率。针对侧视图<10μm,不存在可用工作设置,即使通过使用20或25兆像素的高分辨率相机也如此。因此,不可能具有良好焦点及高分辨率来区分实际缺陷与非关键污染物。
14.图3是用于通过望向半导体装置2的顶面4而检测内部缺陷9(侧缺陷)的现有技术设置的另一实施例。针对检测内部缺陷9(其从外部不可见),不存在对高容积检验的解决方案。存在慢方法,其通过使用ir光13及光学装置14且望向半导体装置2的背面(“ir后视图”)。相机6检测从半导体装置2返回的ir光15。图4中展示使用图3的设置而获得的图像16的示意性代表图。使用ir光13来检测内部缺陷9的“ir后视图”方法也具有缺点。首先,所述方法是缓慢的。其仅作为手动、低容积方法而存在。如果某人想要使所述方法自动化且使其更快速,那么在可用ir相机6的大小及像素数目方面存在重要限制。另外,其仅针对其中存在外露硅侧来施加所述ir光的有限装置集合起作用。越来越多的装置具有涂层来保护所述装置,所述涂层对ir光不透明。另一缺点是信号噪声比。半导体装置2的顶面4还将产生反射,其使得难以区分顶部缺陷与内部缺陷9。
15.上文所描述的此现有技术方法因检验工件(经单切半导体装置)的五个侧而具有显著缺点。一个缺点是所述工件的侧面与底面之间的不同焦点。光学长度对仰视图及侧视图是不同的,因此所述焦点总是在所述工件的底部上的焦点与所述工件的边缘(侧面)上的焦点之间的折衷。另一缺点是图像分辨率。所述四个侧面的视图要求大视域且此将限制可使用的像素分辨率。
技术实现要素:
16.本发明的目的是提供一种设备,其使使用高分辨率来检测经单切工件中的侧缺陷及内部缺陷并区分所述工件的面上的实际缺陷与污染物成为可能。另外,所述设备应具有高处理量以对此类工件做时间有效的质量控制。
17.通过一种用于工件中的缺陷检测的设备实现上文目的,其中所述设备包括:
18.至少一个光源,其用于提供所述工件在其处是透明的波长范围的照明光;
19.具有透镜的相机,其用于使来自所述工件上的至少一个面的所述光成像于所述相机的检测器上;及
20.平台,其用于移动所述工件且用于使所述工件的所述至少一个面完整地成像。
21.本发明设备的优点是其可能可靠地检测经单切工件(例如半导体装置,还已知为裸片)中的侧缺陷及内部缺陷。本发明设备可用以使用高处理量而对此类工件做质量控制。
22.本发明的另一目的是提供一种方法,其用于以高分辨率检测经单切工件中的侧缺陷及内部缺陷,使得某人可区分在所述工件的所述面上的实际缺陷与污染物。另外,所述方法应实现高处理量以在合理时间内对此类工件做质量控制。
23.通过一种用于工件中的缺陷检测的方法而实现此目的,所述方法包括:
24.使用所述工件在其处是透明的波长范围的照明光来照明所述工件的至少一个面的部分;
25.将来自工件的所述至少一个面的所述部分的光成像于相机的检测器上;及
26.执行固持所述工件的平台与所述相机的相对移动,使得所述工件的所述至少一个面由所述相机完整地成像。
27.本发明方法的优点是其可能可靠地检测经单切工件(例如半导体装置,还已知为裸片)中的侧缺陷及内部缺陷。本发明方法可用以使用高处理量而对此类工件做质量控制。
28.本发明的目的还提供一种计算机程序产品,其安置于非暂时性计算机可读取媒体上,以高分辨率自动地检测经单切工件(半导体装置)中的侧缺陷及内部缺陷,使得某人可区分在所述工件的所述面上的实际缺陷与污染物。另外,所述计算机程序应实现高处理量以在合理时间内对此类工件做质量控制。
29.由安置于非暂时性计算机可读取媒体上的用于工件中的缺陷检测的计算机程序产品实现上文目的,所述产品包括计算机可执行过程步骤,所述步骤可操作以控制计算机执行以下操作:
30.将所述工件放置于平台上;
31.使用所述工件在其处是透明的波长范围的照明光而照明所述工件的至少一个面;
32.使用光学设置而将来自所述工件的所述至少一个面的光引导到用于使所述工件的所述至少一个面的光的线成像的相机的至少一个线传感器;
33.移动固持所述工件的所述平台,使得所述工件的所述至少一个面由所述相机的所述线传感器完整地成像且在所述平台的所述移动期间位于所述相机的焦点中。
34.通过本发明检测的典型缺陷是由所述工件的切割过程产生的侧裂痕或由所述工件中的内部应力而产生的嵌入式裂痕。假设所述工件是半导体装置,那么所述内部应力可存在于(例如)电介质层与硅结构之间。应注意,本发明(设备、方法及计算机程序)不受限于半导体装置且一般来说适用于侧缺陷及内部缺陷。
35.通常某人将使用红外(ir)光以能够穿透基于硅的半导体装置,但所述光源可取决于所述工件的材料对其透明的波长范围而改变。
36.根据本发明的方面,所述至少一个光源经布置使得所述照明光被引导到所述工件的一个侧面且所述相机接收从所述工件的另一侧面射出的所述光。所述工件的此另一侧面与接收所述照明光的所述工件的所述侧面相反以获得背光照明。
37.另一可能性是所述工件的所述另一侧面定向到接收所述照明光的所述工件的所述侧面,使得获得所述另一侧面的暗场图像。
38.本发明的另一方面是所述至少一个光源经布置使得所述照明光被引导到所述工件的顶面,且所述相机接收从所述工件的所述顶面照射出的所述光。
39.本发明的有利实施例是假设所述相机的所述检测器是线传感器且所述相机经配置为线扫描相机。在新设备或方法中,线扫描相机(其垂直于所述工件(半导体装置)的所述
侧面)的使用通过移动在x、y、θ平台上的所述工件而产生图像。通过本发明光学设置,可产生所述工件的所述顶面的至少一部分及至少一个侧面的同时视图。此光学设置还允许共轴照明及外部照明,因此所述两个模式可具有相同或个别照明。
40.所述相机的透镜将从所述工件的侧面射出的光的线成像到所述线传感器上。所述射出光源从经布置使得获得背光照明的至少一个光源。
41.沿垂直于待成像的所述线的扫描方向移动固持所述工件的平台。使用所述扫描运动而产生所述工件的所述侧面中的至少一者的完整图像。
42.所述相机的透镜还可能将来自所述工件的顶面的至少一部分的光的线成像到所述线传感器上,其中光的所述线经定位成相邻于所述工件的所述侧面中的一者,且所述至少一个光源经布置使得来自所述顶面的所述光与被引导到所述工件的所述顶面的至少一部分上的所述光共轴。为产生所述工件的至少一部分的图像,沿垂直于待成像的所述线的扫描方向移动固持所述工件的平台。据此,获得所述顶面的所述至少一个部分的完整图像。所述顶面的所述部分相邻于所述工件的所述侧面中的至少一者。
43.所述平台及所述相机还可执行相对运动以捕获(例如)所述工件的所述相应面的所述完整图像。可使用沿所述扫描方向的各种速度轮廓而执行所述相应面的扫描。优选实施例是沿所述相应面的长度的恒定速度。常数的选择要求较少软件努力且提供最好图像质量。所属领域的技术人员清楚恒定速度的选择不妨碍其它速度轮廓。另一实施例是在所述扫描期间的经加速及经减速速度。此处,在所述边缘处获得较高捕获率且在所述相应侧面的中心中获得较低捕获率。
44.根据本发明的实施例,提供光学设置,其同时产生从所述工件的侧面射出的光的线的图像及来自所述工件的顶面的光的线的图像。来自顶面的光的所述线的所述图像经定位成相邻于来自所述工件的所述相应侧面的光的所述线。所述光学设置的前端承载顶镜面及第一底镜面及第二底镜面。所述顶镜面捕获来自所述工件的所述顶面的部分的光的所述线的图像。所述第一底镜面及所述第二底镜面捕获从所述工件的侧面射出的光的线的图像。本发明光学设置经设计使得从所述工件的侧面射出的光的线的所述图像及来自所述工件的顶面的光的线的所述图像同时聚焦。
45.根据本发明的实施例,来自至少一个光源的所述光可经单独地耦合到所述工件的一个侧面及所述工件的所述顶面。
46.光导引件被定位于所述至少一个光源与所述工件的顶面及/或相应侧面之间是有利的。
47.所述工件可为经单切半导体装置。在此情况下,所述照明光的所述波长范围是ir光的波长范围,这是因为基于硅的半导体装置对ir光透明。
48.本发明装置具有独特优点。可组合两个视图。无需使用单独相机来取得两个图像。通过组合所述两个视图,信息可在所述图像处理期间在所述视图之间相互关联,从而导致较高缺陷捕获率及较低噪声妨害率。通过使用所述线扫描相机来获得高分辨率图像。相较于普通矩阵相机,可产生具有更高分辨率的图像。当使用ir光时,某人可找到内部缺陷及/或改进特定缺陷的信号噪声比。还可在角度下完成所述俯视图(所述顶面的部分的图像)以产生类暗场检验模式。
49.(例如)假设所述工件是半导体装置,那么本发明方法展示有利效果。就本发明方
法来说,可通过使用行进穿过受检验半导体装置的ir光且通过直接看向所述半导体装置的一个侧面来产生所述缺陷的图像。针对所述光源及所述相机两者,可使用垂直设置(笔直望向/照射到所述边缘)或有角设置。由于硅的高折射率(针对λ=1200nm,n=3.5)及所述装置的粗糙边缘,几乎全部光将进入所述装置中。虽然所述射线将在小角下行进穿过所述装置,但所述射线将在另一侧面射出所述装置作为光的漫射射线。以此方式,所述装置自身充当漫射照明。
50.本发明方法在一个实施例中使用硅(其为所有半导体装置的基材)的物理特性,硅对具有高于1200nm的波长的光变得透明。
51.基于此,所述方法进一步建立于“ir后视图”上,但因为所述装置自身充当漫射照明器,所以本发明方法增加信号噪声比且产生快速检验解决方案的可能性。通常,通过光的所述漫射射线来消除所述切割工艺的边缘变化。材料缺陷(比如,例如应被检测的裂痕)将导致高对比度,这是因为所述半导体装置的内部部分将不接收光,且因此将展示为所述漫射照明装置上的暗部分。
52.本发明的一个重要技术方面是所述半导体装置的所述边缘是不漂亮且干净的(归因于所述半导体装置的切割工艺);因此所述光将不笔直及可预测地行进穿过所述半导体装置,而是被扰乱而产生漫射照明器。另一重要技术方面是通过仅看向所述侧面,待检验区域变成小于通过看向所述整体装置(其为“ir后视图”或“5侧解决方案”)的情况的因子,且此产生增加分辨率(捕获更小缺陷)的机会,并且实现更快检验(这是因为图像仍可更加小于针对其它方法的情况)。
53.根据实施例,将所述照明光应用于所述半导体装置的一个侧面上;因为所述边缘是外露硅(来自所述切割工艺),所以所述光传播穿过所述半导体装置。因为所述装置的边缘是粗糙的(归因于所述切割工艺),所以光射线将不笔直行进穿过所述装置。当到达所述半导体装置的另一侧面时,在小角(大约<17度)下入射的所述射线将透射出所述半导体装置外部。 /
‑
90度角的射线使半导体装置的边缘如同漫射照明器那样照射。然而,当到达内部缺陷或侧裂痕时,正常光传播被阻断,从而导致所述漫射照明装置中的“有缺陷”部分及因此所述相机图像中的高对比度度暗斑点。所述裂痕通常是所述硅结构中的干扰。在此干扰处,所述光被反射且不传播。由于这个原因,在此位置处,所述相机将看不见任何光穿过。
54.用于执行所述半导体装置的检验的另一实施例使用相同原理。此处,所述ir光照射穿过所述半导体装置以提供“有角侧视图”。在角度下将ir光发送到所述样本中。内部裂痕阻断光且改变来自所述粗糙边缘的正常漫射照明。所述有角侧视图提供大分辨率但仍实现快速检验。由于此类缺陷阻断正常内部光传播,所以每一内部缺陷或侧缺陷呈现为更大且具有更高对比度度。照射出所述半导体装置的所述漫射ir光对外部污染物具有经减小响应且因此增加所述实际缺陷的信号噪声比。
55.当在所述半导体装置内部移动所述焦点时,某人可进一步远离所述边缘分辨内部缺陷。以此方式,某人甚至可扫描穿过所述完整半导体装置。
56.根据本发明方法,将所述至少一个光源的所述照明光引导到所述工件的侧面。使用所述相机而使从所述工件的另一侧面射出的光成像。优选地,所述相机由透镜而使从所述工件的所述另一侧面射出的所述光成像到线传感器上。
57.本发明的另一实施例是将所述至少一个光源的所述照明光引导到所述工件的顶
面。所述相机由透镜而使由所述工件的所述顶面照射出的所述光成像。优选地,所述相机由透镜而使从所述工件的所述顶面射出的所述光成像到线传感器上。
58.本发明的另一实施例是使用光学设置来同时产生从所述工件的侧面射出的光的线图像及来自所述工件的顶面的部分的光的线图像。待检测的顶面的所述部分经定位成相邻于所述工件的所述相应侧面。
59.根据本发明方法的一个实施例,存在以下的可能性:移动平台用于使所述工件的至少两个侧面及所述顶面的所述相应部分成像。本发明方法包括:
60.a)执行在具有所述工件的所述平台与所述相机之间的线性、相对移动,使得所述相机的图像平面平行于所述侧面中的一者;
61.b)使具有所述工件的所述平台旋转;及
62.c)重复步骤a)及b)直到所述工件的全部侧面由所述相机成像为止。
63.可仅通过所述相机的线性移动而实现所述平台与所述相机之间的所述线性、相对移动。在所述旋转步骤之间所述相机的所述线性移动在相反方向上定向。
64.根据本发明方法的另一实施例,存在以下的一种可能性:移动平台以使所述工件的至少两个侧面及所述顶面的所述相应部分成像。本发明方法包括:旋转所述平台且并行执行所述平台在所述x/y平面中的移动,使得在所述平台的所述旋转移动期间所述相机的焦点保持在所述相应侧面上。
65.根据本发明的另一方面,提供一种计算机程序产品,其安置于非暂时性计算机可读取媒体上用于工件中的缺陷检测,所述产品包括计算机可执行过程步骤,所述步骤可操作以控制计算机进行以下操作:
66.将所述工件放置于平台上;
67.使用所述工件在其处是透明的波长范围的照明光而照明所述工件的至少一个面;
68.通过光学设置将来自所述工件的所述至少一个面的光引导到用于使所述工件的所述至少一个面的光的线成像的相机的至少一个线传感器;及
69.移动固持所述工件的平台,使得所述工件的所述至少一个面由所述相机的所述线传感器完整地成像且在所述平台的所述移动期间位于所述相机的焦点中。
70.如上文已提及,根据本发明方法的一个实施例,使用线扫描相机,其垂直于所述半导体装置的所述侧面。通过移动在x、y、θ平台上的所述半导体装置而产生图像。通过定制光学装置,产生由所述半导体装置的所述顶面的至少一部分及侧面的同时视图。此光学设置还允许共轴照明及外部照明,因此所述两个模式可具有相同或个别照明。所述线扫描相机设置保证高分辨率图像,其对区域扫描相机来说是不可能的。通过组合所述至少一个侧面及所述顶面的所述两个视图,所述图像含有更加多的信息来提取在所述半导体装置中的所述缺陷的准确位置及来源。通过在移动平台设置上的集成,虽然某人接收两个高分辨率视图,但仍可获得高速检验。
71.使用具有所述线传感器的所述相机的实施例具有独特优点。两个视图经组合且因此无需使用单独相机来取得两个图像。且通过组合所述两个视图,信息可在所述图像处理期间在所述视图之间相互关联,从而导致较高缺陷捕获率及较低噪声妨害率。通过使用所述线扫描相机,相较于普通矩阵相机可产生具有更高分辨率的图像。
72.经受检验的所述半导体装置通常在移动装置中使用。上文描述中所提及的所述侧
裂痕导致顾客退货,使装置制造商承担高成本,装置制造商因此备受来自其顾客的促使其完成自动化检验且检测这些侧缺陷的压力。此外,具有此类缺陷的装置仍然可以通过电测试,但在实地通常变成早期故障(例如,当移动电话掉下时)。如所解释,应清楚地知道,当前方法论是不充分的,这是因为其仍遗漏所述半导体装置中的缺陷(其对顾客退货来说是风险)同时其通过触发不重要缺陷而拒绝良好装置(这对制造商来说导致金钱损失)。
附图说明
73.下文将参考附图进一步描述本发明及其优点,其中:
74.图1是用于通过看向半导体装置的侧而检测内部缺陷的现有技术设置;
75.图2是由图1中所展示的设置而获得的图像的示意性代表图;
76.图3是用于通过望向半导体装置的顶表面而检测内部缺陷的现有技术设置;
77.图4是由图3中所展示的设置而获得的图像的示意性代表图;
78.图5是用于使用ir照明而在具有背光照明的侧视图中执行半导体装置的检验的布置的示意性代表图;
79.图6是用于使用ir照明而在具有暗场照明的侧视图中执行半导体装置的检验的布置的示意性代表图;
80.图7是用于使用ir照明而在具有背光照明的有角侧视图中执行半导体装置的检验的布置的示意性代表图;
81.图8是用于使用ir照明而在侧视图中执行半导体装置的边缘检验的布置及所述半导体装置的扫描运动的示意性代表图;
82.图9是用于使用ir照明而在俯视图中执行半导体装置的边缘检验的布置及所述半导体装置的扫描运动的示意性代表图;
83.图10是用于同时执行半导体装置的侧视图及俯视图的布置的实施例;
84.图11是用于执行半导体装置的一个侧面的侧视图的布置的透视图;
85.图12是半导体装置的侧视图及俯视图检验的光机械集成的详细图;
86.图13a到13e是半导体装置的线性及旋转扫描模式的实施例的示意性代表图;及
87.图14a到14f是半导体装置的经组合线性及旋转扫描运动的实施例的示意性代表图。
具体实施方式
88.在图式中,相同参考数字用于相同元件或具有相同功能的元件。此外,为简洁起见,仅在图式中展示讨论相应图式所必需的那些参考数字。可结合ir光而有利地采用本文中所描述的方法及设备用于在半导体装置中的缺陷检验。通常某人将使用ir光以能够穿透所述半导体装置的硅。在本发明的其它实施例中,所述光源的波长可改变。唯一先决条件是所述受检验工件(半导体装置)的材料必须对所使用的波长范围透明。下文描述涉及半导体装置,其不应被理解成本发明的限制。如所属领域的技术人员清楚地知道,本发明的原理及构想适用于工件的内部缺陷或侧缺陷的任何检验。本发明到半导体装置的应用不应视作限制。
89.图5展示用于使用ir光13而执行半导体装置2的检验的布置20的示意性代表图。布
置20是在具有背光照明的侧视图中。由光源18产生的ir光13垂直地照射于半导体装置2的一个选定侧面31、32、33或34上。还可能的是,ir光13不经准直且不垂直地入射于半导体装置2的一个选定侧面31、32、33或34上。就此处所展示的布置20来说,可通过使用行进穿过半导体装置2的ir光13而产生缺陷9的图像。使用ir光13的优点是某人可找到内部缺陷9及/或改进半导体装置2的特定缺陷9的信号噪声比。
90.相机6使用其透镜7直接看向半导体装置2的一个选定侧面31、32、33或34。由于硅的高折射率(针对λ=1200nm,n=3.5)及半导体装置2的粗糙侧面31、32、33或34(边缘),几乎全部ir光13将进入半导体装置2。虽然ir光13的射线将在小角度下行进穿过半导体装置2,但所述射线将在相反侧面31、32、33或34处射出作为光的漫射射线21。以此方式,半导体装置2自身充当漫射照明器。然而,当到达内部缺陷9或侧裂痕时,正常光传播被阻断,从而导致所述漫射照明中的“有缺陷”部分。ir光13的阻断由虚线箭头22表示。透镜7及相机6使侧面31、32、33及34分别成像,且内部缺陷9在相机图像中呈现为高对比度度暗区段。裂痕或内部缺陷9通常是半导体装置2的硅结构中的干扰。在此干扰处,ir光13经反射且不传播。因为这个原因,在内部缺陷9的位置处,相机6中的检测器26将看不见任何光穿过。
91.图6中展示用于使用ir光13而执行半导体装置2的检验的布置20的另一实施例。此处,使用来自光源18的ir光13而执行半导体装置2的检验。具有透镜7的相机6经布置使得相机6寄存半导体装置2的相应侧面31、32、33或34的暗场图像。在第二面32处,ir光传播的方向23垂直于相机6的透镜7的光轴24。
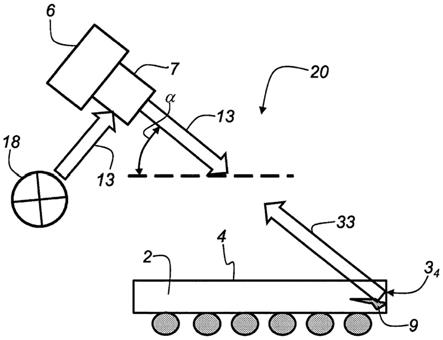
92.图7中展示发明布置20的另一实施例。ir光13从光源18发送到半导体装置2的顶面4且在角度α下进入半导体装置2中。ir光13传播穿过半导体装置2且分别聚焦于半导体装置2的侧面31、32、33及34中的一者上。所述内部裂痕或缺陷9阻断ir光13且改变来自粗糙侧面31、32、33及34中的一者的正常漫射照明(参见图5)。图7中所展示的布置提供大分辨率但仍使半导体装置2的侧面31、32、33及34中的一者的快速检验(此处,检验第四侧面34)成为可能。每一个内部缺陷或侧缺陷9在由相机6取得的图像中呈现为更大且具有更高对比度度,这是因为此类缺陷阻断正常内部光传播。照射出半导体装置2的漫射ir光33对半导体装置2的外部污染物具有经减小响应且因此增加实际缺陷9的信号噪声比。
93.作为有利替代方案,某人可在半导体装置2内部移动ir光13的焦点,使得某人可进一步远离半导体装置2的侧面31、32、33及34分辨内部缺陷9。因此,某人甚至可扫描穿过完整半导体装置2。
94.图8展示本发明的布置20的另一实施例的示意性代表图。相机6具有线传感器36,且透镜7使侧面31、32、33或34中的一者的线35成像于线传感器36上。相机6经配置为线扫描相机。沿扫描方向37移动相机6。可通过在半导体装置2的相应侧面31、32、33或34与相机6之间沿扫描方向37的相对运动来实现所述移动,扫描方向37垂直于待成像于线传感器36上的线35。半导体装置2的相应侧面31、32、33或34与相机6之间的相对运动不应视作本发明的限制。还应清楚地知道,可仅移动所述相机或仅移动所述半导体装置。
95.半导体装置2定位于x、y、θ平台(此处未展示)上。所述x、y、θ平台经移动使得使用相机6的线传感器36来产生全部四个侧面31、32、33或34的图像。在此处所展示的实施例中,半导体装置2是由块状半导体层40(bsl)(其为任选的)、硅衬底41、电介质层42及金属层43组成。就所述线扫描相机设置来说,高分辨率图像是可能的,其对区域扫描相机来说是不可
能的。针对所述侧视图(类似于图5的布置),外部ir光13从光源18照射穿过半导体装置2(裸片)。ir光13来自半导体装置2的一个侧面31、32、33或34,且在半导体装置2的相反侧面31、32、33或34处由线扫描相机6捕获。从半导体装置2的每一侧面31、32、33或34产生高分辨率图像。为了照射穿过半导体装置2,使用半导体装置2对其为透明的波长范围。针对典型半导体装置2(或裸片),这将为ir光13。
96.图9是用于使用ir照明而在侧视图中执行半导体装置2的边缘检验的布置20及半导体装置2的扫描运动的示意性代表图。此处,相机6还具有线传感器36,且透镜7使接近侧面31、32、33或34中的一者的顶面4的线35成像于线传感器36上。分束器27将来自光源18的ir光13引导到半导体装置2的顶面4上。由相机6的线传感器36捕获来自半导体装置2的顶面4的共轴返回ir光34。再次,半导体装置2沿扫描方向37的移动垂直于成像于相机6的线传感器36上的线35。半导体装置2的所述移动实现在侧面31、32、33或34中的一者处的半导体装置2的顶面4的边缘部分30的俯视图的产生。在图9中,顶面4的边缘部分30相邻于半导体装置2的第四侧面34。
97.图10中所展示的实施例展示用于同时执行半导体装置2的侧视图及俯视图检验的布置20。提供特定光学设置25,其允许半导体装置2的顶面4及侧面31、32、33或34中的一者上的同时视图。此光学设置25还允许半导体装置2的顶面4的照明(共轴照明)及侧面31、32、33或34中的一者的照明(外部照明)。所述两个照明模式(共轴照明及外部照明)可具有相同光源或个别光源。
98.通过组合半导体装置2的顶面4及侧面31、32、33或34中的一者上的视图,顶面4及侧面31、32、33或34的所述图像含有更加多的信息,以提取所述缺陷的准确位置及来源。通过移动平台设置上的集成,虽然使用两个高分辨率视图,仍可获得高速检验。
99.通过布置20及特定光学设置25(如图10中所展示),可产生半导体装置2的顶面4的边缘部分30(参见图9)及一个侧面31、32、33或34的同时视图。另外,提供两个个别线传感器36。一者用于捕获顶面4的部分的图像,且另一者用以捕获邻近顶面4的侧面31、32、33或34中的一者的图像。
100.根据此处所展示的实施例,光导引件50用于传送ir光13。光导引件50定位成尽可能接近半导体装置2,以使用ir光13来照明顶面4的边缘部分30及邻近侧面31、32、33或34中的一者。
101.图11展示用于执行半导体装置2的侧面31、32、33或34中的至少一者的侧视图的装置的透视图。将半导体装置2(此处未展示)放置于具有卡盘45的固持件上。卡盘45安装于θ平台38上,θ平台38可至少在x
‑
坐标方向x及y
‑
坐标方向y上线性地移动。另外,倾斜也是可能的。还可集成z
‑
坐标方向z上的线性移动。光源18将照明光13引导到卡盘45上的半导体装置2。在此处所展示的实施例中,光源18经布置使得半导体装置2的一个侧面31、32、33或34被照明。光源18的所述布置称为背光布置。
102.在光源18的对面,具有光学设置25的布置20经布置以接收射出半导体装置2的一个侧面31、32、33或34(其与半导体装置2的经照明侧面31、32、33或34相反)的光。将光学设置25定位于布置20之前端39处。布置20连接到计算机32,计算机32接收来自布置20的图像数据。另外,计算机32连接到用于移动平台38的控制件31,使得由布置20扫描相应侧面31、32、33或34。
103.图12中展示布置20的光学设置25的详细图。光学设置25允许半导体装置2的同时侧视图及俯视图检验。在此处所展示的实施例中,光学设置25同时产生射出半导体装置2的侧面31、32、33或34的光的线的图像及来自半导体装置2的顶面4的至少一部分的光的线的图像。如先前已描述,来自顶面4的光的所述线经定位成相邻于半导体装置2的相应侧面31、32、33或34的光的所述线。光学设置25的前端39承载顶镜面51、第一底镜面52及第二底镜面53。顶镜面51捕获来自半导体装置2的顶面4的部分的光的所述线的图像。第一底镜面52及第二底镜面53经布置于光学设置25之前端39处使得其可捕获从半导体装置2的侧面射出的光的线的图像。光学设置25经设计使得从半导体装置2的侧面31、32、33或34射出的光的线的所述图像及来自半导体装置2的顶面4的光的线的所述图像同时聚焦。所述光学光耦合是以经由顶镜面51的光学路径54及经由第一底镜面52及第二底镜面53的光学路径55可单独被照亮的方式。
104.图13a到13e展示检验四个侧面31、32、33及34及/或顶面4的边缘部分30的过程。假设某人检验四个侧面31、32、33及34及邻近相应侧面31、32、33或34的顶面4的边缘部分30,某人得到经组合侧视图及俯视图图像。平台38执行如图13a到图13e的实施例中所描述的运动轮廓。在图13a中,半导体装置2放置于平台38上。如上文所描述,半导体装置2还可由卡盘(此处未展示)固持,所述卡盘自身安装于平台38(θ平台)上。
105.在图13b中,第一侧面31平行于相机6的图像平面44。在具有半导体装置2的平台38与相机6之间执行线性、相对移动46。在移动46期间,相机6的图像平面44保持平行于第一侧面31。在完成第一侧面31的扫描之后,平台38在顺时针方向上旋转90
°
,使得半导体装置2的第二侧面32平行于相机6的图像平面44(参见图13c)。如图13c中所展示,在具有半导体装置2的平台38与相机6之间执行相反、线性、相对移动46。在移动46期间,相机6的图像平面44平行于第二侧面32。在完成第二侧面32的扫描之后,平台38旋转90
°
,使得半导体装置2的第三侧面33平行于相机6的图像平面44(参见图13d)。如图13d中所展示,在具有半导体装置2的平台38与相机6之间执行线性、相对移动46。在移动46期间,相机6的图像平面44平行于第三侧面33。在完成第三侧面33的扫描之后,平台38旋转90
°
,使得半导体装置2的第四侧面34平行于相机6的图像平面44(参见图13e)。如图13e中所展示,在具有半导体装置2的平台38与相机6之间执行相反、线性、相对移动46。在移动46期间,相机6的图像平面44平行于第四侧面34。
106.如上文所描述,布置20及特定光学设置25也实现半导体装置2的顶面4的边缘部分30的图像捕获,其中顶面4的边缘部分30(参见图9)相邻于半导体装置2的相应侧面31、32、33或34。
107.图14a到14f中展示用于扫描半导体装置2的至少四个侧面31、32、33及34的过程的额外实施例。平台(此处未展示)及半导体装置2的移动分别由绕半导体装置2的中心58的旋转移动56及半导体装置2在由x
‑
坐标方向x及y
‑
坐标方向y界定的x/y平面上的线性移动57组成。图14a展示扫描半导体装置2的四个侧面31、32、33及34的过程的开始点。相机(此处未展示)的焦点59在第一侧面31上。图14b展示旋转移动56的开始。半导体装置2的中心58同时在x/y平面上经受移动57,使得在旋转移动56期间焦点59保持在第一侧面31上。图14c到14e展示半导体装置2的旋转移动56的各种阶段,其中在旋转移动56期间焦点59保持在第二侧面32上。图14f展示以下状况:焦点59已到达第三侧面33且在半导体装置2的旋转移动56期间
保持在第三侧面33上。
108.如图11中所展示的计算机32协调旋转移动56及在x/y平面上的同时移动57,使得在半导体装置2的360
°
的旋转之后,全部四个侧面31、32、33及34已由布置20成像。此外,计算机32确保焦点59在全360
°
旋转期间维持在全部四个侧面31、32、33及34上,使得获得全部四个侧面31、32、33及34的高质量图像。
109.据信将通过前面描述理解本发明的设备、方法及计算机程序及许多其伴随优点,且将明白,可在不脱离所揭示标的物或不牺牲全部其材料优点的情况下在组件的形式、构造及布置上作出各种改变。所描述形式仅仅是解释性的。
110.在上文描述中,给出多个具体细节以提供对本发明的实施例的透彻了解。然而,本发明的经说明的实施例的以上描述不希望为穷尽性的或将本发明限于所揭示的精确形式。相关领域的技术人员将认识到可在不具有具体细节中的一或多者的情况下或借助其它方法、组件等等实践本发明。在其它例子中,未详细展示或描述众所周知的结构或操作以避免使本发明的方面模糊。虽然为了阐释性目的在本文中描述本发明的特定实施例及实例,但如相关领域的技术人员将认识到,在本发明的范围内可有各种等效修改。
111.可根据上文详细描述对本发明做出这些修改。在所附权利要求书中使用的术语不应理解为将本发明限于说明书及权利要求书中所揭示的特定实施例。而是,本发明的范围将由根据权利要求解释的既定原则理解的所附权利要求书而确定。
112.元件符号列表
[0113]2ꢀꢀꢀꢀꢀ
工件、半导体装置
[0114]
31ꢀꢀꢀꢀ
第一侧面
[0115]
32ꢀꢀꢀꢀ
第二侧面
[0116]33
ꢀꢀꢀꢀ
第三侧面
[0117]34
ꢀꢀꢀꢀ
第四侧面
[0118]4ꢀꢀꢀꢀꢀ
顶面
[0119]5ꢀꢀꢀꢀꢀ
底面
[0120]6ꢀꢀꢀꢀꢀ
相机
[0121]7ꢀꢀꢀꢀꢀ
透镜
[0122]8ꢀꢀꢀꢀꢀ
镜面
[0123]9ꢀꢀꢀꢀꢀ
缺陷、内部缺陷
[0124]
10
ꢀꢀꢀꢀ
图像
[0125]
11
ꢀꢀꢀꢀ
光学长度
[0126]
12
ꢀꢀꢀꢀ
光学长度
[0127]
13
ꢀꢀꢀꢀ
ir光、照明光
[0128]
14
ꢀꢀꢀꢀ
光学器件
[0129]
15
ꢀꢀꢀꢀ
返回ir光
[0130]
16
ꢀꢀꢀꢀ
示意性图像
[0131]
18
ꢀꢀꢀꢀ
光源
[0132]
19
ꢀꢀꢀꢀ
缺陷
[0133]
20
ꢀꢀꢀꢀ
布置
[0134]
21
ꢀꢀꢀꢀ
漫射射线
[0135]
22
ꢀꢀꢀꢀ
虚线箭头
[0136]
23
ꢀꢀꢀꢀ
光传播方向
[0137]
24
ꢀꢀꢀꢀ
光轴
[0138]
25
ꢀꢀꢀꢀ
特定光学设置
[0139]
26
ꢀꢀꢀꢀ
检测器
[0140]
27
ꢀꢀꢀꢀ
分束器
[0141]
30
ꢀꢀꢀꢀ
边缘部分
[0142]
31
ꢀꢀꢀꢀ
控制件
[0143]
32
ꢀꢀꢀꢀ
计算机
[0144]
33
ꢀꢀꢀꢀ
漫射ir光
[0145]
34
ꢀꢀꢀꢀ
返回ir光
[0146]
35
ꢀꢀꢀꢀ
线
[0147]
36
ꢀꢀꢀꢀ
线传感器
[0148]
37
ꢀꢀꢀꢀ
扫描方向
[0149]
38
ꢀꢀꢀꢀ
平台、θ平台
[0150]
39
ꢀꢀꢀꢀ
前端
[0151]
40
ꢀꢀꢀꢀ
块状半导体层
[0152]
41
ꢀꢀꢀꢀ
硅衬底
[0153]
42
ꢀꢀꢀꢀ
金属层
[0154]
44
ꢀꢀꢀꢀ
图像平面
[0155]
45
ꢀꢀꢀꢀ
卡盘
[0156]
46
ꢀꢀꢀꢀ
线性相对移动
[0157]
50
ꢀꢀꢀꢀ
光导引件
[0158]
51
ꢀꢀꢀꢀ
顶镜面
[0159]
52
ꢀꢀꢀꢀ
第一底镜面
[0160]
53
ꢀꢀꢀꢀ
第二底镜面
[0161]
54
ꢀꢀꢀꢀ
光学路径
[0162]
55
ꢀꢀꢀꢀ
光学路径
[0163]
56
ꢀꢀꢀꢀ
旋转移动(图10中的前见)
[0164]
57
ꢀꢀꢀꢀ
移动
[0165]
58
ꢀꢀꢀꢀ
中心
[0166]
59
ꢀꢀꢀꢀ
焦点
[0167]
x
ꢀꢀꢀꢀꢀ
x
‑
坐标方向
[0168]
y
ꢀꢀꢀꢀꢀ
y
‑
坐标方向
[0169]
z
ꢀꢀꢀꢀꢀ
z
‑
坐标方向
[0170]
α
ꢀꢀꢀꢀꢀ
角
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。