1.本技术涉及钻井工程技术领域,特别涉及一种转速的测量装置及方法。
背景技术:
2.目前,在通过钻具进行钻井施工的过程中,钻具的转速是钻井施工的重要工程参数,而钻具的转速直接影响到施工的稳定性和效率。因此,为了确保钻具稳定且高效的进行钻井施工,需要确定钻具的转速。
3.相关技术中,钻具包括钻铤,转速的测量装置包括转盘式转速测量仪。其中,钻铤与转盘连接,通过转盘驱动钻铤旋转。在钻井施工时,钻铤位于井下,转盘位于井上的钻台上;转盘式转速测量仪,用于检测转盘的转速,确定转盘的转速为钻铤的转速,也即该钻具的转速。
4.但是,在钻井施工过程中,钻铤会受到井壁的摩擦力,当受到的摩擦力较大时,钻铤与井壁之间容易发生粘滑现象,也即,转盘正常旋转,而钻铤受到井壁的摩擦力转速降低甚至停止,转盘继续旋转,直至驱动钻铤的扭矩累积大于摩擦力,驱动钻铤迅速旋转。此时,钻铤的转速与转盘的转速不同,通过转速测量仪得到的转盘的转速不能准确表征钻具的实际转速,所以,通过转盘式转速测量仪确定的钻具的转速的准确性低。
技术实现要素:
5.本技术实施例提供了一种转速的测量装置及方法,可以提高钻具的转速的准确性。所述技术方案如下:
6.一方面,本技术提供了一种转速的测量装置,所述装置包括:磁阻传感器、单片机和电源模组;
7.所述磁阻传感器、所述单片机和所述电源模组设置在待测的钻具的钻铤内,所述磁阻传感器与所述单片机电性连接,所述电源模组分别与所述单片机和所述电源模组电性连接;
8.所述电源模组,用于为所述单片机和所述磁阻传感器提供电源;
9.在通过所述钻具进行施工的过程中,所述磁阻传感器随所述钻铤的旋转而旋转,所述磁阻传感器切割地磁场的方向发生周期性变化,所述磁阻传感器的阻值发生周期性变化,进而所述磁阻传感器的电压发生周期性变化,产生周期性变化的电压差分信号;
10.所述单片机,用于对所述电压差分信号进行处理,得到所述钻具的转速。
11.在一种可能的实现方式中,所述磁阻传感器包括第一磁阻传感器和第二磁阻传感器,且所述第一磁阻传感器和所述第二磁阻传感器相互垂直;
12.所述第一磁阻传感器分别与所述单片机和所述电源模组电性连接,所述第二磁阻传感器分别与所述单片机和所述电源模组电性连接;
13.在通过所述钻具进行施工的过程中,所述第一磁阻传感器产生第一电压差分信号,所述第二磁阻传感器产生第二电压差分信号;
14.所述单片机,用于对所述第一电压差分信号和所述第二电压差分信号进行处理,得到所述钻具的转速。
15.在一种可能的实现方式中,所述第一磁阻传感器包括第一电阻、第二电阻、第三电阻、第四电阻、第一信号输出端和第二信号输出端;
16.所述第一电阻与所述第二电阻的空间位置相互垂直,所述第三电阻和所述第四电阻的空间位置相互垂直;
17.所述电源模组分别与所述第一电阻的输入端和所述第二电阻的输入端连接,所述第一电阻的输出端分别与所述第三电阻的输入端和所述第一信号输出端连接,所述第三电阻的输出端与地线连接,所述第二电阻的输出端分别与所述第四电阻的输入端和所述第二信号输出端连接,所述第四电阻的输出端与所述地线连接,所述单片机分别与所述第一信号输出端和所述第二信号输出端连接;
18.随着所述第一电阻、所述第二电阻、所述第三电阻和所述第四电阻切割地磁场的方向的变化,所述第一电阻、所述第二电阻、所述第三电阻和所述第四电阻的阻值发生变化,所述第一信号输出端和所述第二信号输出端产生第一电压差分信号。
19.在一种可能的实现方式中,所述第二磁阻传感器包括第五电阻、第六电阻、第七电阻、第八电阻、第三信号输出端和第四信号输出端;
20.所述第五电阻与所述第六电阻的空间位置相互垂直,所述第七电阻和所述第八电阻的空间位置相互垂直;
21.所述电源模组分别与所述第五电阻的输入端和所述第七电阻的输入端连接,所述第五电阻的输出端分别与所述第七电阻的输入端和所述第三信号输出端连接,所述第七电阻的输出端与地线连接,所述第六电阻的输出端分别与所述第八电阻的输入端和所述第四信号输出端连接,所述第八电阻的输出端与所述地线连接,所述单片机分别与所述第三信号输出端和所述第四信号输出端连接;
22.随着所述第五电阻、所述第六电阻、所述第七电阻和所述第八电阻切割地磁场的方向的变化,所述第五电阻、所述第六电阻、所述第七电阻和所述第八电阻的阻值发生变化,所述第三信号输出端和所述第四信号输出端产生第二电压差分信号。
23.在一种可能的实现方式中,所述单片机包括差分放大组件和处理器;
24.所述差分放大组件的输入端与所述磁阻传感器的输出端电性连接,所述差分放大电路的输出端与所述处理器的输入端电性连接;
25.所述差分放大组件,用于接收所述磁阻传感器输出的电压差分信号,将所述电压差分信号进行放大,且用于将放大后的电压差分信号传输至所述处理器,
26.所述处理器,用于通过放大后的电压差分信号,得到所述钻具的转速。
27.在一种可能的实现方式中,所述单片机还包括模数转换组件;
28.所述模数转换组件的输入端与所述差分放大组件的输出端电性连接,所述模数转换组件的输出端与所述处理器的输入端电性连接;
29.所述模数转换组件,用于将放大后的所述电压差分信号转换为数字信号,且用于将所述数字信号传输至所述处理器;
30.所述处理器,用于通过所述数字信号,得到所述钻具的转速。
31.另一方面,本技术提供了转速的确定方法,所述方法包括:
32.获取所述磁阻传感器产生的电压差分信号;
33.基于所述电压差分信号,确定所述钻具的转速。
34.在一种可能的实现方式中,所述磁阻传感器包括第一磁阻传感器和第二磁阻传感器,所述电压差分信号包括所述第一磁阻传感器产生的第一电压差分信号和所述第二磁阻传感器产生的第二电压差分信号;
35.所述基于所述电压差分信号,确定所述钻具的转速包括:
36.对所述第一电压差分信号和所述第二电压差分信号进行滤波处理、运放处理和数模转换处理,得到第一差分数字信号和第二差分数字信号;
37.确定所述第一差分数字信号的第一正负信息,以及所述第二差分数字信号的第二正负信息;
38.确定所述第一正负信息和所述第二正负信息对应的象限信息,根据所述象限信息,确定在预设时长内变化的象限数量,根据所述象限数量和所述预设时长,确定所述钻具的转速。
39.在一种可能的实现方式中,所述确定所述第一差分数字信号的第一正负信息,以及所述第二差分数字信号的第二正负信息,包括:
40.获取所述第一差分数字信号中的第一最大差分信号和第一最小差分信号,以及确定所述第二差分数字信号中的第二最大差分信号和第二最小差分信号;
41.确定所述第一最大差分信号和所述第一最小差分信号的中点为第一零点,以及所述第二最大差分信号和所述第二最小差分信号的中点为第二零点;
42.当所述第一差分数字信号大于所述第一零点,确定所述第一差分数字信号为正值,当所述第一差分数字信号小于所述第一零点,确定所述第一差分数字信号为负值;当所述第二差分数字信号大于所述第二零点,确定所述第二差分数字信号为正值,当所述第二差分数字信号小于所述第二零点,确定所述第二差分数字信号为负值。
43.在一种可能的实现方式中,所述确定所述第一正负信息和所述第二正负信息对应的象限信息,包括:
44.当所述第一正负信息为正值、所述第二正负信息为正值时,确定所述象限信息为第一象限;
45.当所述第一正负信息为负值、所述第二正负信息为正值时,确定所述象限信息为第二象限;
46.当所述第一正负信息为负值、所述第二正负信息为负值时,确定所述象限信息为第三象限;
47.当所述第一正负信息为正值、所述第二正负信息为负值时,确定所述象限信息为第四象限。
48.本技术实施例提供的技术方案的有益效果至少包括:
49.本技术实施例提供了一种转速的测量装置,由于该测量装置的磁阻传感器设置在待测钻具的钻铤内,在通过钻具进行施工的过程中,磁阻传感器随钻铤的旋转而旋转,这样磁阻传感器的转速与钻铤的实际转速相同,通过磁阻传感器产生的电压差分信号,能够直接确定钻铤的实际转速,也即通过磁阻传感器能够直接确定钻具的钻速,所以提高了确定的钻具的钻速的准确性。
附图说明
50.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
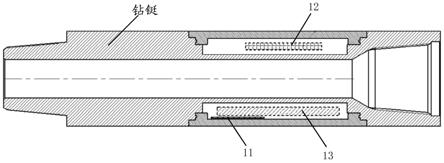
51.图1是根据一示例性实施例示出的一种转速的测量装置的结构示意图;
52.图2是根据一示例性实施例示出的一种磁阻传感器的结构示意图;
53.图3是根据一示例性实施例示出的一种钻具的转速的确定方法的流程图。
54.附图标记:
55.11
ꢀꢀ
磁阻传感器
56.111 第一磁阻传感器
57.112 第二磁阻传感器
58.12
ꢀꢀ
单片机
59.13
ꢀꢀ
电源模组
具体实施方式
60.为使本技术的目的、技术方案和优点更加清楚,下面将结合附图对本技术实施方式作进一步地详细描述。
61.图1是根据一示例性实施例示出的一种转速的测量装置的结构示意图。参见图1,该测量装置包括:磁阻传感器11、单片机12和电源模组13;
62.磁阻传感器11、单片机12和电源模组13设置在待测的钻具的钻铤内,磁阻传感器11与单片机12电性连接,电源模组13分别与单片机12和电源模组13电性连接。
63.电源模组13,用于为单片机12和磁阻传感器11提供电源;
64.在通过钻具进行施工的过程中,磁阻传感器11随钻铤的旋转而旋转,磁阻传感器11切割地磁场的方向发生周期性变化,磁阻传感器11的阻值发生周期性变化,进而磁阻传感器11的电压发生周期性变化,产生周期性变化的电压差分信号;单片机12,用于对电压差分信号进行处理,得到钻具的转速。
65.在本技术实施例中,由于在通过钻具进行施工的过程中,磁阻传感器11随钻铤的旋转而旋转,这样磁阻传感器11的转速与钻铤的实际转速相同,通过磁阻传感器11产生的电压差分信号,能够直接确定钻铤的实际转速,也即通过磁阻传感器11能够直接确定钻具的钻速,所以提高了确定的钻具的钻速的准确性。
66.磁阻传感器11的介绍:磁阻传感器11设置在待测的钻具的钻铤内,且磁阻传感器11分别与单片机12和电源模组13电性连接。
67.在一种可能的实现方式中,继续参见图1,钻铤的侧壁内设有与磁阻传感器11匹配的第一凹槽,磁阻传感器11设置在第一凹槽内。在一种可能的实现方式中,磁阻传感器11通过固定胶粘附在第一凹槽内。在另一种可能的实现方式中,磁阻传感器11固定在pcb(printed circuit board,印制线路板)上,印制线路板通过固定胶粘附在第一凹槽内。
68.在一种可能的实现方式中,继续参见图1,测量装置还包括第一盖板;第一盖板与第一凹槽的槽口相匹配;第一盖板与第一凹槽的槽口连接,用于固定磁阻传感器11。
69.在一种可能的实现方式中,参见图2,磁阻传感器11包括第一磁阻传感器111和第二磁阻传感器112,且第一磁阻传感器111和第二磁阻传感器112相互垂直;第一磁阻传感器111分别与单片机12和电源模组13电性连接,第二磁阻传感器112分别与单片机12和电源模组13电性连接;在通过钻具进行施工的过程中,第一磁阻传感器111产生第一电压差分信号,第二磁阻传感器112产生第二电压差分信号;单片机12,用于对第一电压差分信号和第二电压差分信号进行处理,得到钻具的转速。
70.可选的,该磁阻传感器11为hmc1052l(型号名)磁阻传感器11,hmc1052l磁阻传感器11包含双轴磁阻传感器11,也即,x轴、y轴成90度正交的两个磁阻传感器11。磁阻传感器11随钻铤的旋转而旋转时,hmc1052l磁阻传感器11内的两个磁阻传感器11分别输出不同电压的差分信号,也即,第一电压差分信号和第二电压差分信号。
71.在一种可能的实现方式中,继续参见图2,第一磁阻传感器111包括第一电阻、第二电阻、第三电阻、第四电阻、第一信号输出端和第二信号输出端;
72.第一电阻与第二电阻的空间位置相互垂直,第三电阻和第四电阻的空间位置相互垂直;电源模组13分别与第一电阻的输入端和第二电阻的输入端连接,第一电阻的输出端分别与第三电阻的输入端和第一信号输出端连接,第三电阻的输出端与地线连接,第二电阻的输出端分别与第四电阻的输入端和第二信号输出端连接,第四电阻的输出端与地线连接,单片机12分别与第一信号输出端和第二信号输出端连接;
73.随着第一电阻、第二电阻、第三电阻和第四电阻切割地磁场的方向的变化,第一电阻、第二电阻、第三电阻和第四电阻的阻值发生变化,第一信号输出端和第二信号输出端产生第一电压差分信号。
74.在一种可能的实现方式中,第一电阻、第二电阻、第三电阻和第四电阻的材质可以为导磁材料。可选的,该导磁材料为硅钢,或者坡莫合金。可选的,继续参见图2,第一电阻可以用r1表示,第二电阻可以用r2表示,第三电阻可以用r3表示,第四电阻可以用r4表示。
75.在一种可能的实现方式中,继续参见图2,第二磁阻传感器112包括第五电阻、第六电阻、第七电阻、第八电阻、第三信号输出端和第四信号输出端;
76.第五电阻与第六电阻的空间位置相互垂直,第七电阻和第八电阻的空间位置相互垂直;电源模组13分别与第五电阻的输入端和第七电阻的输入端连接,第五电阻的输出端分别与第七电阻的输入端和第三信号输出端连接,第七电阻的输出端与地线连接,第六电阻的输出端分别与第八电阻的输入端和第四信号输出端连接,第八电阻的输出端与地线连接,单片机12分别与第三信号输出端和第四信号输出端连接;
77.随着第五电阻、第六电阻、第七电阻和第八电阻切割地磁场的方向的变化,第五电阻、第六电阻、第七电阻和第八电阻的阻值发生变化,第三信号输出端和第四信号输出端产生第二电压差分信号。
78.在一种可能的实现方式中,第五电阻、第六电阻、第七电阻和第八电阻的材质可以为导磁材料。可选的,该导磁材料为硅钢,或者坡莫合金。可选的,继续参见图2,第五电阻可以用r5表示,第六电阻可以用r6表示,第七电阻可以用r7表示,第八电阻可以用r8表示。
79.需要说明的一点是,钻铤周围地磁场的方向为位于地理南极附近的磁北极指向地理北极附近的磁南极,钻铤周围地磁场的强度固定。可选的,第一电阻、第二电阻、第三电阻、第四电阻固定在pcb板上;pcb板的方向与钻铤的径向平面一致,在钻铤旋转过程中,第
一电阻、第二电阻、第三电阻和第四电阻切割地磁场的方向的变化,第一电阻、第二电阻、第三电阻和第四电阻的阻值发生变化,由于第一电阻和第三电阻的方向不同,所以第一电阻的阻值变化量和第三电阻的阻值变化量不同,导致第一信号输出端的电压和第二信号输出端的电压不同,进而产生第一电压差分信号。
80.并且,由于钻铤旋转过程中,第一电阻、第二电阻、第三电阻和第四电阻切割地磁场的方向的变化为周期性变化,第一电阻、第二电阻、第三电阻和第四电阻的阻值的变化也是周期性变化,进而产生周期性变化的第一电压差分信号。类似的,第五电阻、第六电阻、第七电阻和第八电阻切割地磁场的方向的变化为周期性变化,第五电阻、第六电阻、第七电阻和第八电阻的阻值的变化也是周期性变化,进而产生周期性变化的第二电压差分信号。单片机12,根据周期性变化的第一电压差分信号和第二电压差分信号,确定第一磁阻传感器111和第二磁阻传感器112的旋转频率,进而确定钻具的转速。
81.单片机12的介绍:单片机12设置在待测的钻具的钻铤内,且磁阻传感器11分别与处理器和电源模组13电性连接。
82.在一种可能的实现方式中,继续参见图1,单片机12通过固定胶粘附在第一凹槽内。在另一种可能的实现方式中,单片机12固定在印制线路板上,印制线路板通过固定胶粘附在第一凹槽内。
83.在一种可能的实现方式中,单片机12包括差分放大组件和处理器;差分放大组件的输入端与磁阻传感器11的输出端电性连接,差分放大电路的输出端与处理器的输入端电性连接,电源模组13分别与差分放大组件和处理器电性连接,为差分放大组件和处理器提供电源;
84.差分放大组件,用于接收磁阻传感器11输出的电压差分信号,将电压差分信号进行放大,且用于将放大后的电压差分信号传输至处理器,处理器,用于通过放大后的电压差分信号,得到钻具的转速。
85.可选的,差分放大组件为ad8226(型号名)放大器,ad8226放大器是一款低成本、宽电源电压范围仪表放大器,增益范围为1至1000,额定工作温度范围为-40℃至 125℃。
86.在一种可能的实现方式中,该单片机12还包括模数转换组件;模数转换组件的输入端与差分放大组件的输出端电性连接,模数转换组件的输出端与处理器的输入端电性连接;模数转换组件,用于将放大后的电压差分信号转换为数字信号,且用于将数字信号传输至处理器;处理器,用于通过数字信号,得到钻具的转速。
87.可选的,模数转换组件为模数转换器。例如,该模数转换组件为ads8504(型号名)模数转换器,ads8504模数转换器的转换速率高达250ksps,具有并行输出功能,能大幅度的减小数据传输时间。
88.在一种可能的实现方式中,在将电压差分信号转换为数字信号之前,可以先对该电压差分信号进行滤波处理。相应的,该单片机12还包括滤波组件;滤波组件的输入端与差分放大组件的输出端电性连接,滤波组件的输出端与模数转换组件的输入端连接;滤波组件,用于将放大后的电压差分信号进行滤波处理,且用于将滤波处理后的电压差分信号传输至模数转换组件。
89.在一种可能的实现方式中,处理器得到钻具的转速之后还可以对该钻速数据进行存储。相应的,该单片机12还包括存储组件;存储组件与处理器电性连接,用于存储钻具的
转速。
90.在一种可能的实现方式中,存储组件与处理器之间通过通讯模块传输钻具的转速。相应的,该单片机12还包括通讯模块,通讯模块包括信号发射模块和信号接收模块;信号发射模块与处理器电性连接,信号接收模块与存储组件电性连接;信号发射模块,用于接收处理器发送的钻具的转速,向信号接收模块发送钻具的转速;信号接收模块,用于接收钻具的转速,向存储组件发送钻具的转速,存储组件接收钻具的转速,对钻具的转速进行存储。
91.电源模组13的介绍:电源模组13设置在待测的钻具的钻铤内,电源模组13分别与单片机12和电源模组13电性连接,用于为单片机12和磁阻传感器11提供电源。
92.在一种可能的实现方式中,继续参见图1,钻铤的侧壁内设有与电源模组13匹配的第二凹槽,电源模组13设置在第二凹槽内。
93.在一种可能的实现方式中,测量装置还包括第二盖板;第二盖板与第二凹槽的槽口相匹配;第二盖板与第二凹槽的槽口连接,用于固定电源模组13。
94.可选的,电源模组13为单极性电源模组。
95.图3是根据一示例性实施例示出的一种钻具的转速的确定方法的流程图。参见图3,该方法包括:
96.301、单片机获取磁阻传感器产生的电压差分信号。
97.磁阻传感器包括第一磁阻传感器和第二磁阻传感器,电压差分信号包括第一磁阻传感器产生的第一电压差分信号和第二磁阻传感器产生的第二电压差分信号
98.在一种可能的实现方式中,单片机分别与第一磁阻传感器和第二磁阻传感器电性连接,第一磁阻传感器将产生的第一电压差分信号传输至单片机,第二磁阻传感器将产生的第二电压差分信号传输至单片机,单片机获取第一磁阻传感器产生的第一电压差分信号和第二磁阻传感器产生的第二电压差分信号。
99.需要说明的一点是,在通过钻具进行施工的过程中,第一磁阻传感器切割地磁场的方向变化为周期性变化,第一磁阻传感器的阻值的变化也是周期性变化,进而产生周期性变化的第一电压差分信号。类似的,第二磁阻传感器切割地磁场的方向变化为周期性变化,第二磁阻传感器的阻值的变化也是周期性变化,进而产生周期性变化的第二电压差分信号。
100.302、单片机基于电压差分信号,确定钻具的转速。
101.在一种可能的实现方式中,本步骤可以通过以下步骤(1)至(3)实现:
102.(1)单片机对第一电压差分信号和第二电压差分信号进行运放处理、滤波处理和数模转换处理,得到第一差分数字信号和第二差分数字信号。
103.在一种可能的实现方式中,本步骤为:单片机通过差分放大组件对第一电压差分信号和第二电压差分信号进行运放处理,得到放大后的第一电压差分信号和第二电压差分信号;单片机通过滤波组件对放大后的第一电压差分信号和第二电压差分信号进行滤波处理,得到滤波后的第一电压差分信号和第二电压差分信号,通过模数转换组件对滤波后的第一电压差分信号和第二电压差分信号进行数模转换处理,得到第一差分数字信号和第二差分数字信号。
104.在通过钻具进行施工的过程中,第一差分数字信号为与第一电压差分信号对应的
周期性变化的数字信号;第二差分数字信号为与第二电压差分信号对应的周期性变化的数字信号。可选的,第一差分数字信号可以用字母xad表示,第二差分数字信号可以用字母yad表示。
105.(2)单片机确定第一差分数字信号的第一正负信息,以及第二差分数字信号的第二正负信息。
106.在一种可能的实现方式中,单片机通过差分数字信号对应的零点,确定差分数字信号的正负信息。相应的,本步骤为:单片机获取第一差分数字信号中的第一最大差分信号和第一最小差分信号,以及确定第二差分数字信号中的第二最大差分信号和第二最小差分信号;确定第一最大差分信号和第一最小差分信号的中点为第一零点,以及第二最大差分信号和第二最小差分信号的中点为第二零点;当第一差分数字信号大于第一零点,确定第一差分数字信号为正值,当第一差分数字信号小于第一零点,确定第一差分数字信号为负值;当第二差分数字信号大于第二零点,确定第二差分数字信号为正值,当第二差分数字信号小于第二零点,确定第二差分数字信号为负值。
107.需要说明的一点是,单片机在确定第一零点和第二零点以后,还可以根据零点附近的差分信号,对第一零点和第二零点进行校正,得到第一校正零点和第二校正零点,当第一差分数字信号大于第一校正零点,确定第一差分数字信号为正值,当第一差分数字信号小于第一校正零点,确定第一差分数字信号为负值;当第二差分数字信号大于第二校正零点,确定第二差分数字信号为正值,当第二差分数字信号小于第二校正零点,确定第二差分数字信号为负值。
108.在一种可能的实现方式中,单片机根据第一零点附近的差分信号,对第一零点进行校正,得到第一校正零点的步骤为:单片机获取第一目标时间点对应的第一目标差分信号以及第二目标时间点对应的第二目标差分信息,第一目标时间点为第一零点的上一个时间点,第二目标时间点为第一零点的下一个时间点;根据第一目标差分信号、第二目标差分信息、第二目标时间点和第二目标时间点,对第一零点进行校正,得到第一校正零点。
109.其中,第一零点的上一个时间点与第一零点之间的时间差为预设时间差,第一零点的下一个时间点与第一零点之间的时间差为预设时间差。预设时间差可以是1s至5s之间的任一数值,例如,1s、2s、3s等;在本技术实施例中,对预设时间差的数值不作具体限定,可以根据需要进行设定并修改。
110.在一种可能的实现方式中,单片机根据第一目标差分信号、第二目标差分信息、第二目标时间点和第二目标时间点,对第一零点进行校正,得到第一校正零点的步骤为:单片机根据第一目标差分信号、第二目标差分信息、第一目标时间点和第二目标时间点,通过以下公式一对第一零点进行校正,得到第一校正零点;
111.公式一:y
ref
=t1‑
y1(t2‑
t1)/(y2‑
y1)
112.其中,y
ref
表示第一校正零点,t1表示第一目标时间点、t2表示第二目标时间点,y1表示第一目标差分信号,y2表示第二目标差分信号。
113.在本技术实施例中,单片机根据第二零点附近的差分信号,对第二零点进行校正,得到第二校正零点的方法与单片机根据第一零点附近的差分信号,对第一零点进行校正,得到第一校正零点的方法相同,在此不再进行赘述。
114.(3)单片机确定第一正负信息和第二正负信息对应的象限信息,根据象限信息,确
定在预设时长内变化的象限数量,根据象限数量和预设时长,确定钻具的转速。
115.在一种可能的实现方式中,单片机确定第一正负信息和第二正负信息对应的象限信息的步骤为:当第一正负信息为正值、第二正负信息为正值时,单片机确定象限信息为第一象限;当第一正负信息为负值、第二正负信息为正值时,单片机确定象限信息为第二象限;当第一正负信息为负值、第二正负信息为负值时,单片机确定象限信息为第三象限;当第一正负信息为正值、第二正负信息为负值时,单片机确定象限信息为第四象限。
116.其中,预设时长可以是1s至60s之间的任一数值,例如,30s、60s、90s等;在本技术实施例中,对预设时长的数值不作具体限定,可以根据需要进行设定并修改。
117.在一种可能的实现方式中,单片机根据象限数量和预设时长,确定钻具的转速的步骤为:单片机根据象限数量和预设时长,通过以下公式二,确定钻具的转速;
118.公式二:
119.其中,r表示钻具的转速,t表示预设时长,n表示象限数量。转速的单位为:转/分;预设时长的单位为:秒。
120.在本技术实施例中,由于在通过钻具进行施工的过程中,磁阻传感器随钻铤的旋转而旋转,这样磁阻传感器的转速与钻铤的实际转速相同,通过磁阻传感器产生的电压差分信号,能够直接确定钻铤的实际转速,也即通过磁阻传感器能够直接确定钻具的钻速,所以提高了确定的钻具的钻速的准确性。
121.以上所述仅为本技术的可选实施例,并不用以限制本技术,凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。