技术特征:
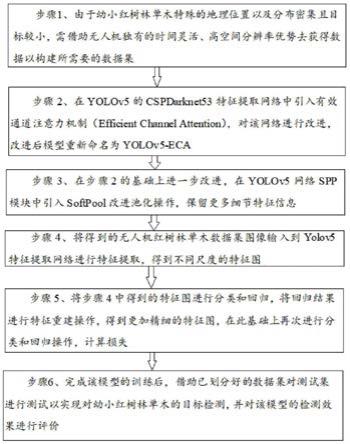
1.一种基于改进yolov5的红树林单木目标检测方法,其特征在于含有以下步骤:利用开源软件labelimg在选取的无人机影像上依次标注目标树,构建红树林单木数据集;选择yolov5为基础目标检测模型,依据目标木分布密集且尺寸较小的特点对其进行优化和改进,使用有效通道注意力机制efficient channel attention对cspdarknet53骨干网络进行改进,避免降维和具有跨通道交互作用的同时,增强特征表达能力,并在spp模块引入softpool池化操作,保留更多细节特征信息,提高自动化目标检测精度。2.根据权利要求1所述的一种基于改进yolov5的红树林单木目标检测方法,其特征在于包括步骤如下:步骤1、由于幼小的红树林单木特殊的地理位置以及分布密集且目标较小,借助无人机独有的时间灵活、高空间分辨率优势去获得数据以构建所需要的数据集;步骤2、在yolov5的cspdarknet53特征提取网络中引入有效通道注意力机制(efficient channel attention)模块,对yolov5网络进行改进,改进后模型重新命名为yolov5
‑
eca;步骤3、在步骤2的基础上进一步改进,在yolov5网络spp模块中引入softpool改进池化操作,保留更多细节特征信息;步骤4、将得到的无人机红树林单木数据集图像输入到yolov5特征提取网络进行特征提取,得到不同尺度的特征图;步骤5、将步骤4中得到的特征图进行分类和回归,将回归结果进行特征重建操作,得到更加精细的特征图,在此基础上再次进行分类和回归操作,计算损失;步骤6、完成模型的训练后,借助已划分好的数据集对测试集进行测试以实现对幼小红树林单木的目标检测,并对模型的检测效果进行评价。3.根据权利要求2所述的一种基于改进yolov5的红树林单木目标检测方法,其特征在于步骤1中为保证图像中各个检测目标的完整,使用labelimg开源软件对无人机图像中红树林单木幼苗依次进行标注,标注内容为新造红树林矩形包围框坐标,存储为xml文本文件用于yolov5模型的训练和测试,yolov5的结构包括输入端input、基准网络backbone、特征融合部分neck、和检测头head部分,yolov5的输入端包含了训练数据集图像的预处理阶段,在输入端沿用yolov4的mosaic数据增强,用来提升模型的训练速度和网络精度,同时新加了自适应锚框计算程序,在骨干网络部分,yolov5增加focus结构,用来提取通用的特征,并依此构造了两种csp结构,focus结构对图片进行切片操作,在骨干网络和头检测中间的特征融合部分,yolov5添加fpn pan的组合结构,同时编写相应的分割程序将图片裁剪成所需大小并在裁剪后的图像上将标注目标框贴合在目标树上,核查有无漏标注的目标物,以便补充完整。4.根据权利要求2所述的一种基于改进yolov5的红树林单木目标检测方法,其特征在于步骤2中有效通道注意力机制(efficient channel attention)模块通过大小为k的快速一维卷积产生通道注意,其中核的大小完全由通道维数相关函数自适应来确定,在维度保持不变的条件下输入特征图像χ,所有通道经过全局平均池化之后,eca模块利用一个可以权重共享的一维卷积来学习特征,并在学习特征的时候涉及到每一个通道与之k个近邻来捕获跨通道交互,k表示快速一维卷积的内核大小,而自适应k取值的确定,是通过跨通道信
息交互作用的遮盖区域与通道维数c的正比关系得到,计算如公式(1)所示:式中:γ=2,b=1,|*|
ood
表示最邻近奇数,c为通道维数。5.根据权利要求2所述的一种基于改进yolov5的红树林单木目标检测方法,其特征在于步骤3中针对目标较小且像素过低的新造红树林幼苗,利用最大值池化和平均池化进行特征映射时,易损失重要检测信息,因此在spp模块中引入softpool改进池化操作,保留更多细节特征信息,即在激活特征图的池化区域内使用softmax方式实现池化,softpool下采样过程中从左到右依次是:特征图的激活、区域内计算softpool最后的池化结果输出,softpool利用softmax,根据非线性特征值计算区域r的特征值权重:式中:w
i
为第i个元素激活的权重,a
i
为第i个激活值,r为池化区域大小,e为数学常数,是自然对数函数的底数,权重w
i
能够保证重要特征的传递,区域r内的特征值在反向传递时都至少会有预设的最小梯度,在得到权重w
i
后,通过加权区域r内的特征值得到输出:式中:r为池化区域大小,为softpool的输出值,实现了对池化内核所有激活因子的加权求和。6.根据权利要求2所述的一种基于改进yolov5的红树林单木目标检测方法,其特征在于步骤4中在进行yolov5特征提取网络进行特征提取之前,将数据进行mosaic增强操作,再统一缩放到一个标准尺寸进行focus切片操作,而后输入到yolov5特征提取网络进行特征提取。7.根据权利要求2所述的一种基于改进yolov5的红树林单木目标检测方法,其特征在于步骤6中目标检测中通常用平均精准度ap(average precision)和平均精准度的均值map来评价模型的检测效果和性能,ap为召回率recall和精确率precision曲线下的面积,面积交并比iou:通过计算模型预测目标的矩形区域与验证集中目标标定的矩形区域的面积交并比,衡量模型的位置预测能力,精确率precision:表示模型检测出正确的目标数占总目标数的比例,体现出模型在目标检测时的准确度,召回率(recall):召回率表示模型已检测出的目标数量占总目标数量的比例,体现了模型识别的查全能力,
式中:tp(true positive)为检测出正确的正样本个数,即预测框与标注框类别相同且iou>0.5;fp(false positive)为检测出错误的正样本的个数;fn为检测出错误的负样本的个数;r为整个实数集;ap为召回率和精确率曲线下的面积。
技术总结
一种基于改进YOLOv5的红树林单木目标检测方法,深度学习中的目标检测、图像处理技术以及改进YOLOv5算法的幼小红树林单木识别技术,属于林业科学研究中红树林单木目标检测领域。利用开源软件Labe l Img在选取的无人机影像上依次标注目标树,构建红树林单木数据集,选择YOLOv5为基础目标检测模型,依据目标木分布密集且尺寸较小的特点对其进行优化和改进,使用有效通道注意力机制Eff i c i ent Channe l Attent i on对CSPDarknet53骨干网络进行改进,避免降维和具有跨通道交互作用的同时,增强特征表达能力,并在SPP模块引入SoftPoo l池化操作,保留更多细节特征信息,提高自动化目标检测精度。高自动化目标检测精度。高自动化目标检测精度。
技术研发人员:马永康 凌成星 刘华 赵峰 张雨桐 曾浩威
受保护的技术使用者:中国林业科学研究院资源信息研究所
技术研发日:2021.08.31
技术公布日:2021/11/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。