技术特征:
1.基于干涉条纹的激光阵列活塞相位控制方法,其特征在于,包括:将种子激光分为两部分,一部分输入到激光阵列相干合成单元用于产生激光阵列,一部分作为参考光束;采集一部分激光阵列相干合成单元产生的激光阵列并对其进行缩束;利用高速相机探测缩束后的激光阵列与参考光束的干涉条纹图像,根据干涉条纹图像测量得到高速相机处激光阵列中各单元光束与参考光束的活塞相位误差,获取激光阵列中各单元光束与参考光束的活塞相位误差在一段时间内的时域分布;根据激光阵列中各单元光束与参考光束的活塞相位误差在一段时间内的时域分布,对激光阵列中各单元光束的活塞相位进行控制。2.根据权利要求1所述的基于干涉条纹的激光阵列活塞相位控制方法,其特征在于,对于激光阵列中的任一单元光束,相位控制单元根据以下控制策略生成当前k时刻单元光束对应的相位调制器两端施加的电压,从而对其活塞相位进行控制:对于激光阵列中的任一单元光束,δu(k)为相对于k
‑
1时刻,k时刻单元光束对应的激光阵列相干合成单元中相位调制器两端施加的电压的改变量,u(k
‑
1)为k
‑
1时刻单元光束对应的激光阵列相干合成单元中相位调制器两端施加的电压,u(k)为k时刻单元光束对应的激光阵列相干合成单元中相位调制器两端施加的电压;k
p
为比例参数,k
i
为积分参数,k
d
为微分参数,e(k)为k时刻利用高速相机测量得到的单元光束与参考光束的活塞相位误差,e(k
‑
1)为k
‑
1时刻利用高速相机测量得到的单元光束与参考光束的活塞相位误差,e(k
‑
2)为k
‑
2时刻利用高速相机测量得到的单元光束与参考光束的活塞相位误差。3.根据权利要求1所述的基于干涉条纹的激光阵列活塞相位控制方法,其特征在于:种子激光来源于种子激光器,将种子激光器输出的激光先经预放大器进行功率放大之后,由1
×
2光纤分束器分为两部分,一部分输入到激光阵列相干合成单元用于产生激光阵列,一部分作为参考光束。4.根据权利要求1至3中任一项所述的基于干涉条纹的激光阵列活塞相位控制方法,其特征在于:所述激光阵列相干合成单元包括1
×
n光纤分束器、n个相位调制器、n个主放大器和n个准直器组成的准直器阵列,输入激光阵列相干合成单元的种子激光先经1
×
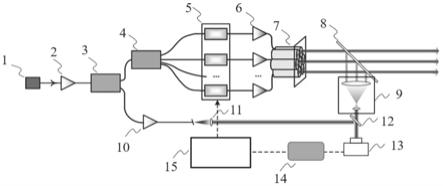
n光纤分束器均分为n路单元光束,各路单元光束分别对应一路传输路径,各路传输路径中依次设有相位调制器、主放大器和准直器,各路单元光束依次经相位调制器、主放大器进行相位调制和功率放大之后经准直器阵列中的准直器准直输出。5.根据权利要求4所述的基于干涉条纹的激光阵列活塞相位控制方法,其特征在于:由采样镜采集激光阵列到光学缩束器,得到缩束后的激光阵列。6.根据权利要求4所述的基于干涉条纹的激光阵列活塞相位控制方法,其特征在于:缩束后的激光阵列入射到半透半反镜,参考光束经参考光放大器、参考光准直透镜后入射到半透半反镜,分别经半透半反镜透射、反射后入射到高速相机。7.基于干涉条纹的激光阵列活塞相位控制系统,其特征在于,包括:种子激光产生单元,用于产生种子激光,并将其分为两部分,一部分输入到激光阵列相
干合成单元用于产生激光阵列,一部分作为参考光束;激光阵列相干合成单元,包括1
×
n光纤分束器、n个相位调制器、n个主放大器和n个准直器组成的准直器阵列,输入激光阵列相干合成单元的种子激光先经1
×
n光纤分束器均分为n路单元光束,各路单元光束分别对应一路传输路径,各路传输路径中依次设有相位调制器、主放大器和准直器,各路单元光束依次经相位调制器、主放大器进行相位调制和功率放大之后经准直器阵列中的准直器准直输出;激光阵列采样单元,包括采样镜和光学缩束器,由采样镜采集激光阵列到光学缩束器,得到缩束后的激光阵列;图像采集单元,利用高速相机探测缩束后的激光阵列与参考光束的干涉条纹图像;干涉条纹解算模块根据干涉条纹图像测量得到高速相机处激光阵列中各单元光束与参考光束的活塞相位误差,获取激光阵列中各单元光束与参考光束的活塞相位误差在一段时间内的时域分布;相位控制单元,根据激光阵列中各单元光束与参考光束的活塞相位误差在一段时间内的时域分布,对激光阵列中各单元光束的活塞相位进行控制。8.根据权利要求7所述的基于干涉条纹的激光阵列活塞相位控制系统,其特征在于,对于激光阵列中的任一单元光束,根据以下控制策略生成当前k时刻单元光束对应的相位调制器两端施加的电压,从而对其活塞相位进行控制:对于激光阵列中的任一单元光束,δu(k)为相对于k
‑
1时刻,k时刻单元光束对应的激光阵列相干合成单元中相位调制器两端施加的电压的改变量,u(k
‑
1)为k
‑
1时刻单元光束对应的激光阵列相干合成单元中相位调制器两端施加的电压,u(k)为k时刻单元光束对应的激光阵列相干合成单元中相位调制器两端施加的电压;k
p
为比例参数,k
i
为积分参数,k
d
为微分参数,e(k)为k时刻利用高速相机测量得到的单元光束与参考光束的活塞相位误差,e(k
‑
1)为k
‑
1时刻利用高速相机测量得到的单元光束与参考光束的活塞相位误差,e(k
‑
2)为k
‑
2时刻利用高速相机测量得到的单元光束与参考光束的活塞相位误差。9.根据权利要求7或8所述的基于干涉条纹的激光阵列活塞相位控制系统,其特征在于,种子激光产生单元包括种子激光器、预放大器和1
×
2光纤分束器,种子激光器输出的激光经预放大器进行功率放大之后,由1
×
2光纤分束器分为两部分,一部分输入到激光阵列相干合成单元用于产生激光阵列,一部分作为参考光束。10.根据权利要求7或8所述的基于干涉条纹的激光阵列活塞相位控制系统,其特征在于,图像采集单元,包括参考光放大器、参考光准直透镜、半透半反镜和高速相机,缩束后的激光阵列入射到半透半反镜,参考光束经参考光放大器、参考光准直透镜后入射到半透半反镜,分别经半透半反镜透射、反射后入射到高速相机,由高速相机探测到缩束后的激光阵列与参考光束的干涉条纹图像。
技术总结
本发明提供一种基于干涉条纹的激光阵列活塞相位控制方法及系统,采集部分激光阵列并对其进行缩束;利用高速相机探测缩束后的激光阵列与参考光束的干涉条纹图像,根据干涉条纹图像测量得到高速相机处激光阵列中各单元光束与参考光束的活塞相位误差,获取激光阵列中各单元光束与参考光束的活塞相位误差在一段时间内的时域分布;根据激光阵列中各单元光束与参考光束的活塞相位误差在一段时间内的时域分布,对激光阵列中各单元光束的活塞相位进行控制。本发明可以对每一路单元光束的活塞相位进行更精确的控制,从而提升合成系统的合成效率,解决了传统方法中由于采样频率低导致的合成效果不高的不足。合成效果不高的不足。合成效果不高的不足。
技术研发人员:马鹏飞 常琦 侯天悦 常洪祥 粟荣涛 吴坚 李灿 马阎星 周朴 司磊 许晓军 陈金宝
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:2021.08.18
技术公布日:2021/11/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。