一种基于人工鱼群
‑
牛顿迭代的架空光缆应力计算方法
技术领域
1.本发明涉及一种基于人工鱼群
‑
牛顿迭代的架空光缆应力计算方法,属于高压输电线路技术领域。
背景技术:
2.架空光缆(以下统称为光缆)是指架挂在杆塔上、应用于电力系统中兼顾电力传输和信息通信的各类复合缆和特种光缆,是电网的重要组成部分,主要分为吊线式和自乘式,具有可以利用原有的架空线路、节省建设费用、缩短建设周期等优点。但光缆在空中容易受到环境变化和其它外力的影响,产生故障。光缆架设后,在恶劣的自然条件下(如温度变化、风速、覆冰等)受力,导致光缆自身发生形变,这对光缆的寿命影响很大,会造成断裂等许多事故隐患。除了自然因素之外,光缆自身受力情况也是影响其使用寿命和安全问题的重要原因之一,如何保证光缆在架设以及日后的运行当中在形变允许的范围之内受力是一个重要的问题。
3.为了延长光缆的使用寿命,现有研究除了从光缆本身出发,提高光缆生产原材料的性能和制造工艺之外,借鉴高压输电线路弧垂研究,使光缆在架设之后在空中保持一个稳定的状态也是研究的一个重要方向。高压输电线路弧垂是线路设计和运行的主要指标,关系到线路的运行安全,光缆弧垂亦是如此。建立弧垂实时监测系统可以更好的确保线路运行和被跨越设备的安全,其中光缆的受力情况是监测的一个重要指标,而且是进行理想弧垂计算的重要参数,所以如何确定光缆在不同环境条件下的受力情况,对设计者而言是一个重要的环节。
4.架空光缆应力方程的计算属于实际工程计算,整体过程十分复杂,所以常忽略光缆的刚度,用悬链线或抛物线进行计算,误差在工程允许范围内。而目前它的求解方法和非线性方程求解方法类似,主要是以梯度信息为基础的传统迭代方法,例如:牛顿法、拟牛顿法、共轭梯度法等。这些方法过程相对简单易懂,但是对迭代初值的依赖性较大,在实际应用中常常会有因为初值设定的不合理导致算出的结果不收敛的问题,增加了整体的计算量同时降低了计算结果的有效率。为了更好的解决这一问题,近年来,利用智能优化算法求解非线性方程组受到越来越多研究者的关注。
5.智能优化算法是一种基于群体的优化算法,具有隐形并行性,对初始点的要求不高,对不具有可微性的非线性方程组依然适用,求解范围广,具有高效性、鲁棒性等特点,极大地方便了非线性方程组地求解。刘涛等人(liu tao,gao hui.solution of multivariate nonlinear equations based on genetic algorithm[j].electronic test,2021(8):45
‑
47.)总结了以遗传算法为基础的求解非线性方程组的方法,揭示了各种遗传策略的综合应用,同时对未来的研究方向进行了展望,但总体来说收敛速度慢,解决实际问题所需的时间较长。欧阳艾嘉等人(ou yang
‑
ai
‑
jia,liu li
‑
bin,le guang
‑
xue,et al.hybrid particle swarm optimization algorithm for solving nonlinear equations[j].computer engineering and applications,2011,047(009):33
‑
36.)提出
了一种以粒子群算法为基础的求解方法,克服了hooke
‑
jeeves算法对初值敏感的问题,将两种算法的优点结合,能够以满意的精度对未知非线性方程求解,然而该文献所做的数值实验和仿真用到的非线性方程基本属于理论研究范畴,其方程形式较复杂,与光缆实际工程设计关联不大,并且其算法的逻辑也较为复杂,应用起来比较困难,不利于解决实际工程问题。
技术实现要素:
[0006]
针对现有的光缆应力计算方法计算量大、在不同环境条件下计算复杂度高、实时性不好的问题,本发明提出了一种基于人工鱼群
‑
牛顿迭代的架空光缆应力计算方法,其特征在于,所述方法包括:
[0007]
步骤一:根据多目标转化方法,将光缆状态方程转化为模函数;
[0008]
步骤二:利用人工鱼群算法求解步骤一得到的模函数的最优解;
[0009]
步骤三:将步骤二得到的最优解作为初值代入牛顿迭代公式进行计算;
[0010]
步骤四:对牛顿迭代公式的结果进行验证,如果收敛,则输出该结果作为最终解,如果发散则重新进行步骤二。
[0011]
可选的,所述光缆状态方程为:
[0012][0013]
所述模函数为:
[0014][0015]
其中,l为两杆塔间的水平档距;σ
m
为已知应力,σ
m
所处气象条件下的比载、气温分别为g
m
、t
m
;σ
n
为待求应力,σ
n
所处气象条件下的比载、气温分别是g
n
、t
n
;α、e为光缆热膨胀系数和弹性系数;m和n为可求的已知数。
[0016]
可选的,所述步骤二包括:
[0017]
(1)设定人工鱼群算法参数:
[0018]
p维的目标搜索空间中每条人工鱼的状态为:σ=(σ1,σ2,...,σ
p
);
[0019]
欲寻优的变量为:σ
i
=(i=1,2,...,p);
[0020]
人工鱼当前所在位置的适应度值表示为:ρ=f(σ
n
);
[0021]
人工鱼个体间距离表示为:d=||σ
i
‑
σ
j
||(二范数);
[0022]
人工鱼感知范围表示为v;人工鱼移动步长表示为s;拥挤度因子表示为δ;人工鱼每次觅食最大试探次数表示为t;最大替换公告板的次数表示为max;
[0023]
(2)计算初始鱼群各个人工鱼的适应度值ρ并比较大小,适应度ρ最小的为最优的人工鱼,将其状态σ赋给公告板;
[0024]
(3)人工鱼行为选择:
[0025]
各个人工鱼分别模拟觅食行为、追尾行为、群聚行为和随机行为,通过比较其适应度值选择最佳行为来执行;
[0026]
(4)更新公告板:
[0027]
每条人工鱼执行行为的过程中更新自身位置状态,若该位置处对应的适应度值小于公告板保存的适应度值,则对公告板保存的状态值进行更新,否则公告板不更新;
[0028]
(5)公告板的迭代次数达到max次后,公告板上最低适应度值对应的人工鱼所处的位置状态为σ0,即f(σ
n
)函数的最优解为σ0。
[0029]
可选的,所述觅食行为包括:
[0030]
对于每一条人工鱼σ
i
,它按照式(3),随机选定一个新状态σ
j
,并比较新旧两个状态的适应度值ρ
i
和ρ
j
,若ρ
j
小于ρ
i
,则该鱼按照如式(4)向σ
j
方向前进一个步长;
[0031]
σ
j
=σ
i
rand(
·
)
·
v
ꢀꢀꢀ
(3)
[0032][0033]
若反复判断t次后仍然无法在附近找到优于现有状态σ
i
的新状态,人工鱼将依据式(5)随机移动一个步长s。
[0034]
σ
i 1
=σ
i
rand(
·
)
·
s
ꢀꢀꢀ
(5)
[0035]
σ
i 1
表示人工鱼σ
i
下一步的位置状态;
[0036]
所述群聚行为包括:
[0037]
对于每一条人工鱼σ
i
,搜索其视野内符合式(6)的伙伴并统计其数量,记为n
f
,并且确定其周边伙伴的中间位置人工鱼σ
c
,其中间位置人工鱼的适应度值为ρ
c
;
[0038]
d
ij
≤v
ꢀꢀꢀ
(6)
[0039]
判断伙伴所处的中心位置状态若状态较优且不太拥挤,即如式(7)(ρ
i
即为人工鱼σ
i
的适应度值)则向该中心位置移动一个步长,否则将执行觅食行为;
[0040][0041]
所述追尾行为包括:
[0042]
σ
i
搜索其视野内适应度最低的个体,记为σ
b
,其同时对目标个体σ
b
视野内所有个体的数量计数n
b
;
[0043]
判断目标个体位置状态(ρ
b
为σ
b
的适应度值)若该位置状态较优且不太拥挤,则σ
i
向目标σ
b
移动一个步长,否则执行觅食行为;
[0044]
所述随机行为包括:
[0045]
如果人工鱼无法从其邻域环境中发现适应度值更低的位置,则放弃搜索,在游动步长范围内随机移动一步。
[0046]
可选的,所述步骤三包括:
[0047]
将人工鱼群算法求得的最优解σ0作为初值代入如下牛顿迭代公式(8),设置最大迭代次数为nmax,迭代精度为eps:
[0048][0049]
可选的,所述架空光缆为opgw
‑
24b1
‑
100光缆。
[0050]
可选的,所述架空光缆的两杆塔间的水平档距为50m。
[0051]
可选的,所述人工鱼算法的基本参数为:p=1;n=50;v=10;s=5;δ=5;t=100;max=100。
[0052]
可选的,所述牛顿迭代公式参数为:nmax=1000;eps=0.000001。
[0053]
本发明有益效果是:
[0054]
利用人工鱼群算法求解架空光缆应力,将非线性光缆状态方程的求解问题转化为寻优问题,降低了计算量和计算复杂度;然后将人工鱼群算法求解出的最优应力值作为初始值代入牛顿迭代法进行计算,得到最终的应力值,进一步克服了人工鱼群算法计算光缆应力时结果随机性大、精度不够的问题;同时,本发明可以根据不同的水平档距、光缆参数、气象条件计算出相应的最优单位应力值,从而牛顿迭代算法可以根据不同环境下的应力初值求解最终的光缆应力,因此本发明应用于实际工程设计中可以及时监测到环境变化中的实时光缆应力,一旦光缆应力偏离标准值范围,可以及时检修,进而可以提升光缆的使用寿命,减少后期的维修成本。
附图说明
[0055]
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0056]
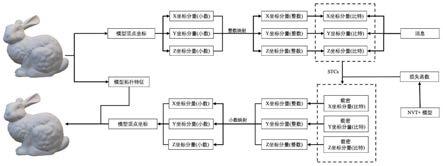
图1为本发明的人工鱼群
‑
牛顿迭代的架空光缆应力计算方法流程图;
[0057]
图2为本发明的人工鱼群
‑
牛顿迭代混合计算方法和传统牛顿迭代法在相同气象条件下的迭代次数图。
具体实施方式
[0058]
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明实施方式作进一步地详细描述。
[0059]
实施例一:
[0060]
本实施例提供一种基于人工鱼群
‑
牛顿迭代的架空光缆应力计算方法,所述算法包括:
[0061]
步骤一:根据多目标转化方法,将光缆状态方程转化为模函数;
[0062]
光缆状态方程为:
[0063][0064]
根据多目标转化法,将上述状态方程转化为:
[0065][0066]
其中,l为两杆塔间的水平档距;σ
m
为已知应力,σ
m
所处气象条件下的比载、气温分别为g
m
、t
m
;σ
n
为待求应力,σ
n
所处气象条件下的比载、气温分别是g
n
、t
n
;α、e为光缆热膨胀系
数和弹性系数;m和n为可求的已知数。
[0067]
步骤二:利用人工鱼群算法求解步骤一得到的模函数的最优解,求解过程包括:
[0068]
(1)设定人工鱼群算法参数:
[0069]
p维的目标搜索空间中每条人工鱼的状态为:σ=(σ1,σ2,...,σ
p
);
[0070]
欲寻优的变量为:σ
i
=(i=1,2,...,p);
[0071]
人工鱼当前所在位置的适应度值表示为:ρ=f(σ
n
);
[0072]
人工鱼个体间距离表示为:d=||σ
i
‑
σ
j
||(二范数);
[0073]
人工鱼感知范围表示为v;人工鱼移动步长表示为s;拥挤度因子表示为δ;人工鱼每次觅食最大试探次数表示为t;最大替换公告板的次数表示为max;
[0074]
(2)计算初始鱼群各个人工鱼的适应度值ρ并比较大小,适应度ρ最小的为最优的人工鱼,将其状态σ赋给公告板;
[0075]
(3)人工鱼行为选择:
[0076]
各个人工鱼分别模拟觅食行为、追尾行为、群聚行为和随机行为,通过比较其适应度值选择最佳行为来执行;
[0077]
觅食行为包括:
[0078]
对于每一条人工鱼σ
i
,它按照式(3),随机选定一个新状态σ
j
,并比较新旧两个状态的适应度值ρ
i
和ρ
j
,若ρ
j
小于ρ
i
,则该鱼按照如式(4)向σ
j
方向前进一个步长;
[0079]
σ
j
=σ
i
rand(
·
)
·
v
ꢀꢀꢀ
(3)
[0080][0081]
若反复判断t次后仍然无法在附近找到优于现有状态σ
i
的新状态,人工鱼将依据式(5)随机移动一个步长s,
[0082]
σ
i 1
=σ
i
rand(
·
)
·
s
ꢀꢀꢀ
(5)
[0083]
σ
i 1
表示人工鱼σ
i
下一步的位置状态;
[0084]
群聚行为包括:
[0085]
对于每一条人工鱼σ
i
,搜索其视野内符合式(6)的伙伴并统计其数量,记为n
f
,并且确定其周边伙伴的中间位置人工鱼σ
c
,其中间位置人工鱼的适应度值为ρ
c
;
[0086]
d
ij
≤v
ꢀꢀꢀ
(6)
[0087]
判断伙伴所处的中心位置状态若状态较优且不太拥挤,即如式(7)(ρ
i
即为人工鱼σ
i
的适应度值)则向该中心位置移动一个步长,否则将执行觅食行为;
[0088][0089]
追尾行为包括:
[0090]
σ
i
搜索其视野内适应度最低的个体,记为σ
b
,其同时对目标个体σ
b
视野内所有个体的数量计数n
b
;
[0091]
判断目标个体位置状态(ρ
b
为σ
b
的适应度值)若该位置状态较优且不太拥挤,则σ
i
向目标σ
b
移动一个步长,否则执行觅食行为;
[0092]
随机行为包括:
[0093]
如果人工鱼无法从其邻域环境中发现适应度值更低的位置,则放弃搜索,在游动步长范围内随机移动一步;
[0094]
(4)更新公告板:
[0095]
每条人工鱼执行行为的过程中更新自身位置状态,若该位置处对应的适应度值小于公告板保存的适应度值,则对公告板保存的状态值进行更新,否则公告板不更新;
[0096]
(5)公告板的迭代次数达到max次后,公告板上最低适应度值对应的人工鱼所处的位置状态为σ0,即f(σ
n
)函数的最优解为σ0。
[0097]
步骤三:将步骤二得到的最优解σ0作为初值代入下列牛顿迭代公式进行计算,并且设置最大迭代次数为nmax,迭代精度为eps;
[0098][0099]
步骤四:对牛顿迭代公式的结果进行验证,如果收敛,则输出该结果作为最终解,如果发散则重新进行步骤二。
[0100]
实施例二:
[0101]
本实例提供一种基于人工鱼群
‑
牛顿迭代混合法的架空光缆应力算法,以opgw
‑
24b1
‑
100光缆为例进行计算,所述算法包括:
[0102]
步骤1:根据多目标转化方法,将光缆状态方程转化为求极小值的模函数,将求解问题转化为优化问题;
[0103]
opgw
‑
24b1
‑
100光缆的物理性能参数如表1所示。
[0104]
表1 opgw
‑
24b1
‑
100光缆的物理性能参数
[0105][0106][0107]
临界档距经计算为1277.64m,当代表档距小于1277.64m时,控制条件是年均气温,控制张力为30400n;当代表档距大于1277.64m时,控制条件是覆冰,控制张力为40533.3n。气象条件如下表2所示,光缆初伸长采用降温10℃补偿。
[0108]
表2气象条件表
[0109][0110]
以代表档距50m,安装温度(t
n
)40℃为例在matlab平台上进行单组数据计算。
[0111]
(1)代表档距小于临界档距,控制条件是年均气温,控制张力(σ
m
)为30400n;
[0112]
(2)当控制条件是年均气温时,根据表2,可以得出综合比载(g
m
)为6.50769n/m,气温(t
m
)为10℃,40℃下的综合比载(g
n
)为6.50769n/m;
[0113]
(3)根据表1,综合弹性系数(e)为162000mpa,综合线胀系数(α)为13.00
×
0.000001 1/℃;
[0114]
(4)将上述参数代入状态方程式,最终结果为:(4)将上述参数代入状态方程式,最终结果为:
[0115]
(5)将状态方程根据多目标转换方法转化为模函数。
[0116]
步骤2:利用人工鱼群算法的快速寻优能力求得模函数的最优(极小)人工鱼坐标;
[0117]
(1)根据调试设置基本参数:p(维度)=1;n(人工鱼数量)=50;v(感知范围)=10;s(步长)=5;δ(拥挤度因子)=5;t(最多试探次数)=100;max(最多迭代次数)=100;
[0118]
(2)将模函数作为目标函数代入人工鱼群算法进行优化;
[0119]
(3)在依次进行行为选择和更新公告板之后,最终求得适应度值最优解为211.5376,对应的人工鱼状态为270.0320。
[0120]
步骤3:把步骤2求得的最优人工鱼坐标的数值作为初值代入牛顿迭代法进行计算;
[0121]
经步骤2所得,最优人工鱼坐标的数值为270.0320,将其代入牛顿迭代公式进行计算,设置最大迭代次数nmax为1000次以及迭代精度eps为0.000001。
[0122]
步骤4:将牛顿迭代法的结果进行验证,如果收敛则输出,如果发散则重新进行步骤2。
[0123]
最终在迭代8次后得到结果(收敛),将其与表1中综合计算截面积相乘,最终结果为26317.0n。
[0124]
为验证本技术技术方案能够更精确地计算架空光缆的应力,特进行仿真实验如下:
[0125]
以代表档距50m至300m,间隔50m;安装温度40℃至10℃,间隔10℃为例,在matlab平台上进行多组数据计算。
[0126]
按照单组数据计算的步骤计算,多组数据经本技术的计算方法和牛顿迭代法(初值为200,迭代次数为1000次,迭代精度为0.000001)的结果如表3所示,两种计算方法获得
结果所需牛顿迭代次数如表4所示,在相同气象条件下两种算法所需的迭代次数结果图如图2所示。
[0127]
表3本技术计算方法与牛顿迭代法计算结果对比
[0128][0129]
表4本技术计算方法与牛顿迭代法所需牛顿迭代次数对比
[0130][0131]
由表3结果可知,牛顿迭代法的应力结果中有两组数据(代表档距200m,安装温度30℃;代表档距250m,安装温度10℃)为零,表示结果不收敛(迭代1000次后结果不满足所设精度),发散概率为8.3%,而本发明的结果全部收敛,结果有效率100%。由此表明,在本发明的计算方法较好地克服了牛顿迭代法结果不收敛的问题。
[0132]
由表4结果可知,本技术的计算方法虽然不是每组数据都比牛顿迭代法迭代次数少,但其平均每组数据所需牛顿迭代次数为22次,小于牛顿迭代法的147次。而且由图2明显可知,本技术总体所需迭代次数较平均,突变值较少,由此可见,利用人工鱼群算法计算架空光缆应力,将光缆状态方程的求解问题转化为寻优问题,再结合牛顿迭代法有效地减少了整个计算过程的迭代次数,从而减少了计算量,加快了计算速度。
[0133]
综上,本技术提出的基于人工鱼群
‑
牛顿迭代的混合架空光缆应力计算方法与传统的牛顿迭代法相比,计算量更少,计算速度更快,计算结果的收敛性更好,更适合实际应用场景。
[0134]
本发明实施例中的部分步骤,可以利用软件实现,相应的软件程序可以存储在可读取的存储介质中,如光盘或硬盘等。
[0135]
以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。