基于车道线方程的arhud导航弯道指示方法及系统
技术领域
1.本发明属于汽车智能导航领域,具体涉及arhud导航及车道线识别技术。
背景技术:
2.arhud是增强抬头显示技术,它可以在驾驶员视线区域内合理叠加显示一些驾驶信息,并结合于实际交通路况当中。通过arhud技术,驾驶员可以扩展并增强自己对于驾驶环境的感知。例如,在导航方面,通过使用arhud,在需要下一个路况拐弯时,arhud上会显示出一排的箭头,指导驾驶员应该在何处进行转弯。现在, arhud要实现与实景融合度较高的导航弯道引导指示,需要高精地图的基础数据支持,而当前车载高精地图价格是普通地图的3
‑
4倍,高代价成为各主机厂的痛点。
3.专利文献cn108177524b 公开了一种arhud系统车道线绘制方法,其包括前摄像头模组,将拍摄的车道图像绘制为车道线送至车道线计算模组;车道线转换计算模组,根据预设车道线转换计算方法实时计算行车车道线;arhud显示模组,将车道线计算模组计算的行车车道线实时显示。该方法绘制的车道线是实时拟合变化的,当车辆的位置发生改变时,车道线ar动画仍然是完整连续地并且可随着车辆的移动而移动,能够提高行车的安全性。该技术存在的问题是未将车道线在arhud显示界面中进行融合,会导致显示界面中绘制的车道线不与实际道路融合。另外未将车道线绘制与导航信号结合,无法确定绘制车道线的时机,同时无法对用户起到导航指示和引导作用。
4.专利文献cn111152721a公开了一种绘制车道的引导线的方法,应用于抬头显示系统,首先,接收汽车的驾驶辅助系统所识别出的汽车所行驶的车道两侧的车道线,根据车道的两侧的车道线,确定车道的引导线以及引导线的目标函数,然后,获取车道的引导线在抬头显示系统中显示的显示函数,最后,根据预设调整算法,逐步调整引导线的显示函数,直至显示函数与目标函数相同。该技术也存在未将车道线绘制与导航信号结合的问题,无法确定绘制车道线的时机,同时无法对用户起到导航指示和引导作用。
技术实现要素:
5.本发明提供一种arhud与实景融合的导航弯道引导方法,以在具备车道线识别的车辆上使用普通地图数据在ar区域绘制弯曲的导航引导箭头,实现与实景较好融合,对驾驶员进行导航引导。
6.本发明的技术方案如下:本发明提供的arhud与实景融合的导航弯道引导方法,包括以下步骤:步骤1)arhud控制器接收导航基础信息和实景车道线信息,建立实景车道方程曲线;所述导航基础信息是普通地图导航信息。
7.步骤2)根据实景车道方程曲线在arhud的投影区绘制中的虚拟车道方程曲线。
8.步骤3)将步骤2)中的虚拟车道方程曲线进行ar融合处理得到虚拟车道线。
9.步骤4)实车标定arhud投影面和道路的融合情况,选取步骤3)中合适的车道线分
段作为导航箭头的绘制基础。
10.步骤5)实时接收导航信号,在导航信号存在的前提下根据步骤4)选取的车道线分段在arhud投影面绘制导航弯道引导箭头。
11.进一步,所述步骤1)具体包括:arhud控制器接收导航基础信息和车道线信息,在判断信息均为有效后,绘制实景车道方程曲线,所述实景车道方程曲线是以行车方向为x轴,垂直行车方向为y轴,以车头正中心为原点建立车道线坐标系,x轴和y轴的坐标关系构成实景车道方程曲线。
12.进一步,所述步骤2)绘制虚拟车道线是以垂直地面方向为x’轴,垂直行车方向为y’轴,以arhud虚拟成像区域底部某位置为原点建立虚拟车道线坐标系,x’轴和y’轴的坐标关系构成虚拟车道方程曲线。
13.进一步,所述步骤3)的ar融合处理是将平面虚拟车道方程曲线通过底部扩大顶部缩小的变形处理,形成近大远小的形态,使得平面车道方程曲线变为有三维视觉效果的车道方程曲线,即为ar融合处理后的虚拟车道线。
14.进一步,步骤4)具体是通过驾驶员视线和arhud的虚拟投影面的连线计算出驾驶员可以看到实际道路的下限,结合实景车道方程曲线、虚拟车道方程曲线和ar融合后的虚拟车道线,计算出适合在arhud投影面显示的车道线分段。
15.进一步,所述步骤5)具体是选取步骤4)计算出车道线分段作为arhud投影面上的导航弯道引导线,根据车道线分段绘制与实景弯道融合度高的导航弯道引导箭头,并将导航弯道引导箭头投影在arhud投影面上。
16.本发明的以上方案,通过利用车道线识别这种l1等级自动驾驶便具备的功能,结合车道线的方程和普通地图的导航数据,设计一种可以由导航信号触发和关闭arhud显示实景导航引导线的方法。本发明提出一种切段的虚拟车道方程曲线,选择合适的分段曲线在arhud投影区域中绘制导航箭头,可以与实际道路高度融合,对驾驶员各类弯道路况进行精准引导,提升驾驶体验感。
附图说明
17.图1为车道线参数绘制的实景车道线示意图;图2为基于arhud投影面虚拟车道线示意图;图3为ar融合处理的示意图;图4为车道线分段示意图;图5为导航弯道绘制示意图;图6为本发明的arhud导航弯道引导方案示意图;图7为本发明的arhud导航弯道引导方案流程图。
18.图中标号:1:根据实际道路参数绘制的实景车道方程曲线;2、3:实际车道线;4:实景车道线坐标系;5:arhud虚拟图像投影面;6:虚拟车道线坐标系 ;
7:虚拟车道方程曲线;8:ar融合处理后的虚拟车道线;9、10、11、12:ar融合处理后的虚拟车道线分段;13:ar投影面上导航弯道引导箭头;14:arhud控制器;15:智能驾驶控制器;16:导航控制器。
具体实施方式
19.以下结合附图进一步详细说明本发明具体实现的细节。
20.实施例1:参见图6,本实施例显示的是arhud与实景融合的导航弯道引导系统,其包括arhud控制器14、导航控制器16、智能驾驶控制器15和arhud投影面5。
21.所述导航控制器16是用于发送普通地图导航信息给arhud控制器14,导航控制器16是具备发送普通地图导航信息的控制器,可以是车上的多媒体主机或仪表。其发送的导航基础信息包括:直行、左转、右转、左前方转弯、右前方转弯、左后方转弯、右后方转弯信号等。
22.所述智能驾驶控制器15是用于发送车道线信息给arhud控制器14,是具备可以识别并发送车道线信息的adas控制器。
23.所述arhud投影面5是用于显示经过arhud控制器14处理后的导航信息。
24.所述arhud控制器14是用于接收导航基础信息和车道线信息,并被配置为执行以下实施例2所展示的导航弯道指示方法。
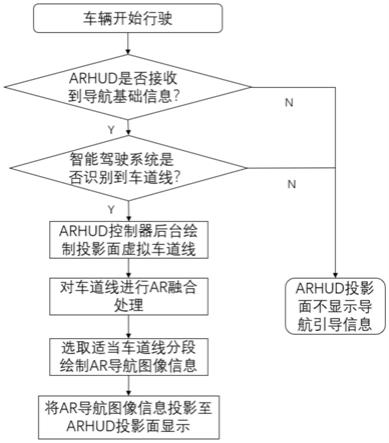
25.实施例2:如图7所示,本实施例是说明通过arhud在其投影面实现与实景融合的导航弯道指示,该方法包括以下步骤:步骤1) arhud控制器14接收导航控制器16的导航基础信息和智能驾驶控制器15的车道线信息,当判断导航控制器16和智能驾驶控制器15发出的导航信息和车道线信息均为有效时,arhud控制器14建立实景车道方程,实景车道线方程是以行车方向为x轴,垂直行车方向为y轴,以车头正中心为原点建立车道线坐标系4,x轴和y轴的坐标关系构成当前原点的车道线方程,得到实景车道方程曲线1,参见图1。
26.本步骤中,当arhud控制器14未接收到导航控制器16的导航基础信息和智能驾驶控制器15的车道线信息,或判断发出的导航信息和车道线信息为无效时,arhud投影面5不显示导航引导信息。
27.步骤2) 在arhud的后台根据实景车道方程曲线1实际车道线方程特征绘制虚拟车道方程曲线7,参见图2。
28.具体是,以垂直地面方向为x’轴,垂直行车方向为y’轴,以arhud虚拟成像区域底部某位置为原点建立虚拟车道线坐标系6,x’轴和y’轴的坐标关系构成当前原点的虚拟车道方程曲线7。
29.这里,虚拟车道方程曲线7仅在arhud控制器14的后台进行计算,不显示在arhud投
影面5。
30.步骤3)虚拟车道方程曲线7是一条二维平面的曲线,通过图3所述的ar融合处理后,可以在arhud投影面5上可以绘制一条与实际车道线2、3相融合的曲线,即为ar融合处理后的虚拟车道线8,参见图3。
31.具体地,ar融合处理是将平面虚拟车道方程曲线通过底部扩大顶部缩小的变形处理,形成近大远小的形态,使得平面车道方程曲线变为有三维视觉效果的车道方程曲线,即为ar融合处理后的虚拟车道线8,车道方程曲线8能与实景路面弯曲效果很好的融合。特别地,上述在进行变形处理时可以根据实车道路标定,确定变形的强度。
32.其中,在arhud投影面5上看到的实际车道线2、3仅为前方实际道路的较短的一部分,ar融合处理后的虚拟车道线8为车头至前方实际道路的较长的虚拟车道线,故要与arhud投影面5上的实际车道线2、3实景融合,需要在ar融合处理后的虚拟车道线8上选取合适的分段。
33.步骤4) 实车标定使虚拟车道线8与实际道路融合,参见图4。
34.具体是,驾驶员视线和arhud的虚拟投影面特征5的连线可计算出驾驶员可以看到实际道路的下限,计算出该值后,结合实景车道方程曲线1、虚拟车道方程曲线7和ar融合后的虚拟车道线8,计算出适合在arhud投影面显示的车道线分段11。
35.特别地,实车标定时,虚拟车道方程曲线7和ar融合后的虚拟车道线8可以在arhud投影面5上显示,标定完成后记录前方弯道距本车不同距离时与各车道线分段9、10、11、12的对应关系。后续在实际应用中直接通过查表的方式在ar融合后的虚拟车道线8上选取合适的分段使用。
36.步骤5) 如选取车道线分段11作为arhud投影面5上的导航弯道引导线,arhud控制器14根据车道线分段11绘制特定的导航弯道引导箭头13,并将导航弯道引导箭头13投影在arhud投影面5上显示,参见图5。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。