有全周范围和大平面外平移位移的梳状驱动mems谐振扫描仪
1.相关申请的交叉引用
2.本技术要求2019年3月18日提交的第62/820,032号美国临时专利申请的优先权,所述申请以全文引用的方式并入本文中。
3.政府利益声明
4.本发明是在政府支持下在由美国国家卫生研究院(national institutes of health)授予的eb020644下进行的。政府在本发明中具有某些权利。
技术领域
5.本公开大体上涉及使用光学仪器使组织成像的技术,更确切地说,涉及允许使用光学仪器进行实时扫描的技术。
背景技术:
6.本文中提供的相关技术的简要说明是出于大体呈现本公开的上下文的目的。就本相关技术部分的此简要说明中所描述的程度而言,当前署名的发明人的工作以及在提交时可不以其它方式具有资格作为现有技术的描述的方面既不明确地也不隐含地被承认为本公开的现有技术。
7.利用微机电系统(mems)技术制造的谐振装置已用以执行具有大幅度和低功耗的快速扫描。mems技术的特征在于机械可靠性高且已用于包含投影显示器、光检测和测距(lidar)、三维(3d)深度感测和傅里叶变换红外(ftir)光谱法的应用。使用常规mems设计和制造方法,已开发可实现高达90
°
的光学扫描角的谐振装置。虽然此性能水平足以用于许多应用,但对于例如全景成像和环视监测的新兴方向,需要甚至更大的位移和偏转角。
8.响应于对较大位移和偏转角的需要,已尝试具有广角光学器件的多个mems扫描仪。然而,当前设计导致复杂性和大小增大。已提议其它mems扫描仪利用致动技术,所述致动技术采用大的力或力矩、运动转换机构、作为灵活枢轴的高断裂材料或用于减小阻尼的真空封装。在其它提出的静电、电磁和薄膜压电技术中,显示出低成本批量制造能力的前景,且因此为用以增加扫描范围的越来越常见的基于mems的方法。仍然需要更有效的mems扫描仪,尤其是可以实现平移和扭转运动的扫描仪,因为其允许执行真正的三维(3d)扫描。
9.迄今为止,已证明大行程的mems谐振扫描仪的设计仅集中于平移或扭转运动。只有包含薄膜压电和热电致动机制的少数方法可以在两种模式下提供大振幅运动。压电和热电mems扫描仪中的可变形薄膜结构通常设计有足够的长度以提供大的变形,但代价是扫描速度有限。尽管吸合效应和高致动电压要求的操作范围有限,但静电致动具有响应时间短、功耗低和易于整合的优点。
10.需要可用于3d和2d成像的改进的mems谐振扫描仪。
技术实现要素:
11.为解决上述问题,本技术描述了mems谐振扫描仪组合件和部署其的装置。mems谐
振扫描仪可为在环境压力下光学扫描角大于360
°
的梳状驱动mems谐振扫描仪。除了此极大扫描范围及旋转移动之外,本文中的各种实例能够实现用于轴向扫描和容积成像的大平面外平移。在各种实例中,可实现大于100μm、大于200μm、大于300μm、大于400μm和大于500μm的平面外平移。在x轴和y轴运动中可实现大于100
°
、大于200
°
、大于300
°
、大于400
°
、大于500
°
等的总扫描角。
12.根据实例,一种用于光学仪器中的扫描组合件包括:框架,其提供支撑;反射器,其悬置于框架的内部区域中;折叠梁弹簧组合件,其联接到反射器且配置成提供反射器的偏转以用于在平面外方向上进行光束扫描;杠杆悬架组合件,其联接到扫描组合件的框架且联接到定位在杠杆悬架组合件与反射器之间的折叠梁弹簧组合件,所述杠杆悬架组合件配置成提供反射器的扭转移动以用于在二维区域内进行光束扫描,杠杆悬架组合件具有杠杆臂;以及梳状驱动器组合件,其连接到杠杆悬架组合件以用于控制反射器的扭转和/或平移移动。
13.在一些实例中,杠杆悬架组合件包括第一杠杆悬架和第二杠杆悬架,所述第一杠杆悬架和所述第二杠杆悬架中的每一个具有杠杆臂,所述杠杆臂以机械方式联接到扫描组合件的框架且联接到折叠梁弹簧组合件,每一杠杆臂是灵活的以提供反射器的偏转。
14.在一些实例中,第一杠杆悬架和第二杠杆悬架中的每一个包括h形扭转弹簧。
15.在一些实例中,折叠梁弹簧组合件包括第一折叠梁弹簧组合件和第二折叠梁弹簧组合件,所述第一折叠梁弹簧组合件和第二折叠梁弹簧组合件各自联接到反射器的相对侧,且各自配置成提供反射器在平面外方向上的偏转。
16.在一些实例中,第一折叠梁弹簧组合件和第二折叠梁弹簧组合件中的每一个包括通过连接臂连接到反射器的四个多匝中央夹紧式折叠梁弹簧。
附图说明
17.为了更完整地理解本公开,应当参考以下详细描述和附图,其中,相同的附图标记表示图中的相同元件,并且其中:
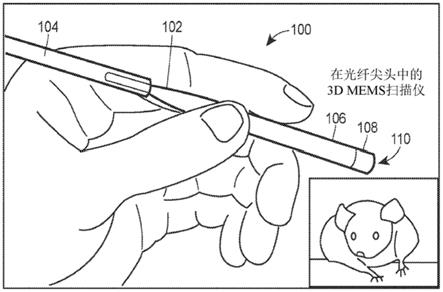
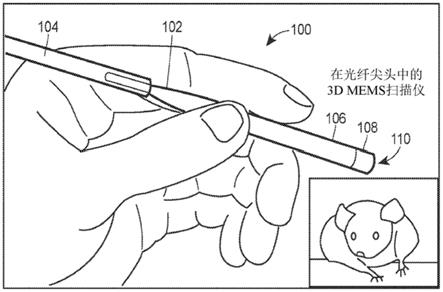
18.图1描绘根据实例的具有近端和具有容纳2d扫描仪的尖端的远端的光学探针。
19.图2为根据实例的2d扫描仪的俯视图。
20.图3为根据实例的展示扭转旋转的图2的2d扫描仪的侧横截面图。
21.图4为根据实例的展示平面外平移位移的图2的2d扫描仪的侧横截面图。
22.图5为根据实例的作为枢轴附接到芯片框架以用于移动图2的2d扫描仪的实例h形扭转弹簧的俯视图。
23.图6为根据实例的用于移动图2的2d扫描仪的实例多匝中央夹紧式折叠梁弹簧的俯视图。
24.图7a示出根据实例的用于3d扫描仪的平移(偏转)移动的刚性主体模型。图7b示出根据实例的用于2d扫描仪的扭转移动的刚性主体模型。
25.图8a和图8b示出根据实例的用于2d扫描仪的有限元模型(fem)模态分析。图8a示出为扭转(反射)且在792.34hz的谐振频率下发生的第一模式。图8b示出为平移(偏转)且在1000.05hz的谐振频率下发生的第二模式。
26.图9a
‑
图9d示出根据实例的用于形成2d扫描仪的制造工艺中的不同步骤。图9a示
出等离子体增强式化学气相沉积(pecvd)sio2硬掩模层的沉积。图9b示出双侧图案化。图9c示出深反应离子蚀刻(drie)蚀刻。图9d示出缓冲氢氟酸(bhf)sio2刻蚀和释放、冲洗和干燥以及al沉积。
27.图10a
‑
图10c分别示出实例2d扫描仪、杠杆臂的h形弹簧和多匝中央夹紧式折叠梁弹簧的扫描电子显微镜(sem)图片。
28.图11a和图11b分别示出根据实例的描绘安装在基板上的2d扫描仪的反射器的移动和2d扫描仪的反射器的图片的示意图。
29.图12a和图12b分别示出根据实例的2d扫描仪运动的图片,展示(a)具有~
±
90
°
机械扫描角的扭转模式和(b)具有>466μm(装置芯片的厚度)的位移的平面外平移模式。
30.图13示出根据实例的可由2d扫描仪实现的实例旋转扫描角。
31.图14a
‑
图14d为根据实例的频率响应的曲线图,展示一次和二次超谐波共振(图14a)、使用100v在1.707khz下实现494
°
的最大光学扫描角的实例(图14b)、使用80v可在10ωt0附近实现高达205
°
的大扫描角(图14c)以及当频率响应曲线的升频扫掠(低到高频率)和降频扫掠(高到低频率)在80v下在62ωt0附近重合时不稳定区域消失(图14d)。
32.图15a和图15b图10示出根据实例的扫描仪参数,特别是展示驱动电压与频率之间的关系(图15a)和最大竖直位移与驱动电压之间的关系(图15b)。
33.图16a
‑
图16b示出根据实例且在不同驱动频率条件下用于平移运动的2d扫描仪的频率响应的曲线图。
34.图17a和图17b示出根据实例的用于平移模式的驱动频率、驱动电压和最大光学扫描角的关系,展示驱动电压与频率之间的关系(图17a),以及最大竖直位移与驱动电压之间的关系(图17b)。
35.图18描绘根据实例的示出在实施2d扫描仪的实例性实施例中使用的各种组件的实例框图。
36.技术人员应了解,图中的元件仅为简单和清晰起见而进行绘示,并且不一定按比例绘制。例如,图中元件的一些的尺寸和/或相对定位可相对于其它元件放大以有助于改善对本发明的各种实施例的理解。另外,在商业上可行的实施例中为有用的或必要的常见但很好理解的元件通常未描绘以便于较少妨碍这些各种实施例的视图。还应当理解,可以特定的发生顺序描述或描绘某些动作和/或步骤,而本领域技术人员将理解,实际上不需要关于序列的这类特定性。还应当理解,除了不同的特定含义以在本文中另有阐述,否则本文使用的术语和表达具有如上所述的技术领域的技术人员对这类术语和表达所赋予的普通技术含义。
具体实施方式
37.一般来说,根据这些各种实施例,提供用于紧凑的集成二维(2d)mems扫描仪的设计、制造和性能的技术。这些2d mems扫描仪的尺寸允许其容纳在内窥镜装置和其它外观尺寸小的应用中。
38.本文中所描述的3d mems扫描技术能够产生大角偏转和平面外位移两者。例如,可在x轴和y轴运动中实现大于约100
°
、大于约200
°
、大于约300
°
、大于约400
°
、大于约500
°
等的总扫描角。本文中所描述的2d mems扫描仪技术可在竖直位移中实现此类操作条件,其中
沿着z轴扫描的深度大于约200μm、大于约300μm、大于约400μm、大于约500μm、大于约600μm等等。
39.图2描绘根据实例的2d光学扫描仪200。2d光学扫描仪具有分别沿着x轴、y轴和z轴的三个自由度。2d光学扫描仪200包含以扫描仪200的中心区域为中心的镜面反射器202。反射器202可包覆有在可见光和/或红外区域具有反射性的反射表面。在包含内窥镜环境的一些实例中,反射器202具有1.5mm的直径。
40.反射器202由两个对称的基于杠杆的悬架204和206支撑,每个悬架分别具有杠杆臂204a、204b和206a、206b。这些杠杆臂204a、204b、206a和206b从扫描仪200的框架210延伸且为灵活的以提供在扭转(例如,旋转)路径(例如,用于扫描xy平面)和偏转(例如,线性平面外位移)路径(例如,用于沿着z轴扫描)中移动反射器202的顺应性。图3示出通过使用杠杆臂的反射器202的扭转路径偏转的实例。图4示出反射器202横穿的偏转路径的实例。也就是说,扫描仪200包含由提供实现如图3和图4所示的平面外位移(偏转)和旋转(扭转移动)的运动转换功能的悬架形成的顺应性机构。
41.杠杆臂204a、204b、206a和206b中的每一个设计成具有梯形几何形状,所述几何形状具有附接到框架210的一对h形扭转弹簧220。图5示出附接到框架210且充当用于反射器202的扭转和偏转路径移动两者的枢轴的h形扭转弹簧220中的一个的俯视图。h形扭转弹簧220由部分重叠的凹槽形成以有助于移动,且其特征在于两种不同的设计几何形状、相邻凹槽之间的间距宽度w
h
和重叠长度l
h
。h形扭转弹簧的此实例设计可实现大角旋转,同时提供对横向弯曲的高阻力。
42.在所示实例中,悬架204和206相同但安置在反射器202的相对侧上,且被图案化为彼此的反射图像。悬架204包含梳状驱动器212。悬架206包含梳状驱动器214。在所示实例中,梳状驱动器212和214为多行梳状驱动器。
43.除梳状驱动器212和214之外,反射器202也由用于变换运动且将反射器202与杠杆臂204a、204b、206a和206b连接的一对四个多匝中央夹紧式折叠梁弹簧222和224移动。弹簧222的一半示出在图6中,展示两个折叠梁侧面222a和222b、以机械方式联接到反射器202的连接臂226以及用于以机械方式联接到水平204a的杠杆连接端228。这些弹簧222和224的设计实现在折叠方向上的大偏转,同时提供对横向弯曲的高阻力。
44.在操作中,两个梳状驱动器212和214形成为绝缘体上硅(soi)晶片的硅层中的平面内结构。两个驱动器212和214用于在共振下激励3d扫描仪200。驱动器212和214的双行梳状布置提供大静电力矩。通过沿着反射器202的中心轴线将多匝中央夹紧式折叠梁弹簧222和224直接附接到连接臂226,实现反射器平移或旋转与杠杆旋转的高比率。沿着z轴的垂直位移和反射器的旋转(扫描)角不仅取决于杠杆臂204和206的旋转,而且取决于多匝折叠梁弹簧222和224的变形。
45.类似于扫描仪200的实例刚性主体模型的2d扫描仪的实例刚性主体模型展示于图7a和图7b中,所述模型描述反射器和杠杆的运动。多匝折叠梁弹簧被处理为串联连接的拉力和扭力弹簧。运动方程可表达如下:
46.[0047][0048]
其中z
l
是杠杆臂在其自由端处提供的竖直位移,z
m
是由多匝折叠梁弹簧提供的竖直位移,l是杠杆臂的整个长度,θ是杠杆臂的旋转角,且θ
m
是多匝折叠梁弹簧在镜面的中心轴线处产生的总弯曲角。最后,z
i
和θ
i
分别是由多匝折叠梁弹簧的个别梁产生的竖直位移和扭转角。
[0049]
可使用具有长杠杆和软弹簧但在较低谐振频率下的设计实现大竖直位移和扫描角。然而,修改基于杠杆的顺应性机构中的多个组件的几何参数的能力使我们能够具有更大的设计灵活性,以满足各种幅度和速度要求。例如,应用方程(1)和(2),我们可以通过杠杆的小旋转实现大的竖直位移和扫描角。杠杆臂与扫描仪框架之间的梳状驱动器可布置成在整个振荡周期的相当大部分中产生且施加大的静电力矩。另外,利用所提出的设计,我们已发现,由于z
i
和θ
i
仅是镜面的竖直位移和扭转角的一部分,因此由大变形和压力引起断裂的风险显著减小。
[0050]
2d扫描仪200的运动方程是使用欧拉
‑
拉格朗日方法推导出来的。扭转运动的方程如下在方程(3)和(4)中:
[0051][0052]
其中j
m
和b
mr
分别是反射器的惯性和扭转模式中的阻尼系数,且k
mt
是等效扭转弹簧常数。杠杆臂的扭转运动表达为:
[0053][0054]
其中j
l
和b
l
是杠杆臂的惯性和阻尼系数,k
l
是h形弹簧的扭转弹簧常数,t
es
是静电力矩,k
me
是单个多匝中央夹紧式梁折叠弹簧的等效拉伸弹簧常数,且l
o
是从杠杆臂的枢轴到反射器的中心轴的距离。h形弹簧可位于杠杆臂的一端并用作连接到锚定件的枢轴。枢轴连接到芯片框架。
[0055]
平面外平移运动的方程如下:
[0056][0057]
其中m是反射器的质量,b
mt
是反射器在平移模式下的阻尼系数,且k
me
是单个多匝中央夹紧式折叠梁弹簧的等效拉伸弹簧常数。
[0058]
使用有限元模型(fem)优化2d扫描仪结构以实现扭转和平移模式中的稳定运动且避免机械和电联接引入的串扰。h形扭转弹簧、多匝折叠梁弹簧和杠杆臂的几何参数如表1所示。
[0059]
表1.扫描仪组件的几何参数。
[0060] 长度宽度厚度匝数h形扭力弹簧l
h
=200μmw
h
=10μm50μm1多匝中央夹紧式折叠梁弹簧l
m
=400μmw
m
=7μm50μm17杠杆臂l
a
=1475μm
─
50μm
─
[0061]
在实例中,fem模态分析的结果展示于图8a和图8b中。第一(图8a)和第二(图8b)模式分别为扭转和平移,且分别在~792和~1hz的共振频率下发生,如所展示。在参数共振系统中,使用为固有频率的两倍的驱动频率实现大振幅运动。这些结果表明,可标识和设计最佳化扫描仪中的不同模式的频率以避免串扰。
[0062]
实例制造和装置
[0063]
图9a
‑
图9d示出用于形成类似于扫描仪200的3d扫描仪的3d扫描仪的实例制造工艺。在所示实例中,使用了两个掩模工艺。使用具有50μm的硅装置层、0.5μm的二氧化硅(sio2)埋层和415μm的硅处理层的soi晶片。如图9a中所示使用等离子体增强式化学气相沉积(pecvd)分别在soi晶片的前侧和后侧上形成0.6μm的sio2层和2.5μm的sio2层。这些层形成用以对结构进行图案化且保护表面免于刮痕和污染的硬掩模。参看图9b,用顶部结构和背面掩模通过光刻法分别对soi晶片的顶表面和底表面进行图案化。参看图9c,在通过等离子体蚀刻移除pecvd sio2层之后,使用深反应离子蚀刻(drie)蚀刻掉暴露的硅和处理层。参看图9d,在进行缓冲氢氟酸(bhf)蚀刻工艺以去除sio2层之后,执行异丙醇(ipa)冲洗和干燥工艺以释放可移动结构。最后,使用电子束蒸发工艺将~60nm的铝(al)层涂布在硅装置层的裸露表面上。
[0064]
图10a
‑
图10c提供实例3d扫描仪的扫描电子显微镜(sem)图像,分别展示2d扫描仪300、h形弹簧302和多匝中央夹紧式折叠梁弹簧304的全貌图。3d扫描仪300的动态性能的特征在于扫掠驱动频率以静电方式激活谐振模式。激光扫描用以测量光学扫描角此参数测量为投影在垂直于镜面反射器的扭转轴线的平面中的弧扫描α的内角,如图11a中所示。制造装置仅沿着一个边缘安装在基板上,如图11b所示。此布置防止安装的基板阻挡振荡扭转模式中的偏转光,且减少振荡平面外平移模式中的挤压阻尼。位移传感器用以测量在平移模式中的镜面反射器行程。
[0065]
在实例中,在谐振扭转模式中以
±
90
°
机械扫描角(图12a),且在谐振平面外平移模式中以位移>466μm(12b)展示2d扫描仪300的运动。在此实例中,2d扫描仪产生宽旋转扫描角,如通过图13的反射激光束的全圆周图案所示。
[0066]
图14a
‑
图14d示出实例2d扫描仪300的扭转运动性能。正如我们所展示的,2d扫描仪作为参数共振扫描仪,可以在扭转模式中表现出极度非线性行为。对在接近两倍的自然频率(ωt0)的频率处的方波驱动信号的响应展示刚度硬化
‑
软化混合行为,且在图14b的1.707khz和100v处实现494
°
的最大光学扫描角。除了此二次超谐波和一次谐振之外,还观察到其它高次超谐波谐振,参见图14a。当正弦波驱动信号的频率在80v处接近10ωt0且实现高达205
°
的大扫描角(参见图14c)时,看到刚度软化现象。然而,当频率响应曲线的升频扫掠和降频扫掠使用80v下接近62ωt0的频率处的正弦波驱动信号重合时,不稳定区域消失,参见图14d。虽然此性能数据是借助于实例提供的,但其展示可利用本发明设计实现的所述范围的稳健性和宽光学扫描角范围和可调性。
[0067]
驱动频率、电压和使用方波信号和接近扭转模式的自然频率的两倍的50%占空比的最大光学扫描角之间的关系在图15a中示出。在40v下实现~200
°
的光学扫描角展示在图15b中。
[0068]
平面外平移运动性能:在一些实例中,2d扫描仪在平移(偏转或平面外)模式中展示刚度硬化
‑
软化
‑
混合行为。还观察到如图16a
‑
图16d中所展示的高次超谐波谐振,其展示
在不同驱动频率条件下从中性反射器位置测量出的竖直位移。图17a和图17b展示方波信号和接近平移模式的自然频率的两倍的50%占空比扫掠频率的情况下的驱动频率、电压和最大位移之间的关系的实例。561μm的最大竖直位移是通过在80v下接近1912hz的50%占空比的方波驱动频率的降频扫掠获得的。在40v的低驱动电压下获得~310μm的位移。
[0069]
所提供的性能值作为实例。我们检查了本文中的扫描仪技术的其它装置配置,在3d和2d扫描中具有类似结果。在实例中,2d扫描仪形成有在4.405khz下执行~320μm的平面外平移位移的0.7mm直径的镜面,且开发在8.425khz下具有~
±
90
°
机械扫描角的扭转扫描。在另一实例中,开发具有3mm直径的镜面2d扫描仪,所述扫描仪执行在652hz下具有~780μm位移的平面外平移扫描,且开发在188hz下具有~
±
90
°
机械扫描角的扭转扫描。在另一实例中,开发执行可切换水平/竖直2d扫描的3d扫描仪,其能够在水平2d扫描模式中产生密集lissajous扫描图案。
[0070]
本技术提供基于用于扭转或(平面外)平移扫描的基于杠杆的顺应机构的梳状驱动mems谐振2d扫描仪。本文中的设计能够在几乎无机械断裂风险的情况下在环境压力中实现超大扫描范围。此外,基于杠杆的顺应性机构的设计非常灵活。
[0071]
用于光学应用的高速mems扫描仪的设计和制造极具挑战性。在过去的40年中,大多数mems扫描仪在偏转角和平移位移的幅度方面几乎没有取得任何进展。光学仪器通常需要大镜面尺寸来捕获最大光。因此,需要大的力和力矩以快速实现高扫描幅度。此外,空气阻尼随着镜面尺寸的增大和扫描速度的加快而显着增加,因此需要紧凑的芯片尺寸。
[0072]
但需要相对较高的电压来获得较大扫描范围。应用梳状驱动装置的本技术展示了高性能,包含在不使用真空封装的情况下具有极大的振幅的快速扫描速度、低功耗、紧凑的尺寸和易于制造。此性能水平可以部署在微型光学系统中,包含内窥镜装置,以执行全景成像和环视监测。此外,因为致动器放置在芯片框架与杠杆臂之间且其运动仅是反射的运动的一部分,所以合理的是预期将所提议的基于杠杆的顺应性整合到采用例如薄膜压电和电磁致动的其它致动技术的mems谐振扫描仪中,以在低驱动电压下实现超大扫描范围。
[0073]
图18示出系统400,所述系统示出用于实施本文中所论述的2d mems扫描仪的实例实施例的各种组件。装置402可具有控制器404,所述控制器经由连接到输入/输出(i/o)电路412的链路422可操作地连接到数据库414。应注意,虽然未示出,但可以已知的方式将额外数据库链接到控制器404。控制器404包含均经由地址/数据总线420互连的程序存储器406、处理器408(可称为微控制器或微处理器)、随机存取存储器(ram)410以及输入/输出(i/o)电路412。应理解,尽管仅示出了一个微处理器408,但控制器404可包含多个微处理器408。类似地,控制器404的存储器可包含多个ram410和多个程序存储器406。尽管i/o电路412被展示为单个块,但应了解,i/o电路412可包含多个不同类型的i/o电路。例如,一个或多个ram 410和程序存储器406可实施为半导体存储器、磁性可读存储器和/或光学可读存储器。
[0074]
程序存储器406和/或ram410可存储各种应用程序(即,机器可读指令),以供微处理器408执行。例如,操作系统430通常可控制装置402(包含3d扫描仪110)的操作并向测试设备提供用户界面以实施本文所描述的过程。程序存储器406和/或ram410还可存储用于访问装置402的特定功能的各种子例程432。程序存储器406和/或ram410可进一步存储与装置402的配置和/或操作相关和/或与一个或多个子例程的操作相关的数据。例如,数据可以是
由3d扫描仪110收集的数据、由处理器408确定和/或计算的数据等。除了控制器404之外,装置402还可包含其它硬件资源。装置202还可联接到各种类型的输入/输出硬件,例如视觉显示器426和一个或多个输入装置428(例如,小键盘、键盘等),以微调扭转和平移扫描的致动。在实施例中,显示器426为触敏的,且可与软件键盘例程协作作为软件例程432之一以接收用户输入。在一些实例中,装置202可通过连接到通信网络436的有线或无线网络接口434与所连接的装置通信。
[0075]
贯穿整个说明书,多个实例可以实施被描述为单个实例的组件、操作或结构。尽管一种或多种方法的单独操作示出并被描述为单独的操作,但是单独操作中的一个或多个可以同时地执行,并且不需要按照所示顺序执行操作。在实例配置中呈现为独立组件的结构和功能可以实现为组合结构或组件。类似地,作为单个组件呈现的结构和功能可以实施为单独的组件。这些和其它变化、修改、添加和改进都落入本文主题的范围内。
[0076]
另外,某些实施例在本文中被描述为包含逻辑或若干例程、子例程、应用程序或指令。这些可以构成软件(例如,体现在非暂时性机器可读介质上的代码)或硬件。在硬件中,例程等是能够执行某些操作的有形单元,并且可以以某种方式配置或布置。在实例实施例中,一个或多个计算机系统(例如,独立的客户端或服务器计算机系统)或者计算机系统的一个或多个硬件模块(例如,处理器或处理器组)可以通过软件(例如,应用或应用部分)被配置成操作以执行如本文所描述的某些操作的硬件模块。
[0077]
在各个实施例中,硬件模块可以机械地或电子地实施。例如,硬件模块可以包括被永久地配置成执行某些操作的专用电路或逻辑(例如,专用处理器,如场可编程门阵列(fpga)或专用集成电路(asic))。硬件模块还可以包括通过软件被临时地配置成执行某些操作的可编程逻辑或电路(例如,如专用处理器或其它可编程处理器中所包含的)。应了解到,在专用且永久配置的电路中或在临时配置的电路中(例如,通过软件进行配置)机械地实施硬件模块的决策可能受成本和时间考虑驱使。
[0078]
因此,术语“硬件模块”应被理解为涵盖有形实体,是指被物理地构造、永久地配置(例如,硬连线)或临时地配置(例如,编程)为按照一定方式操作或者执行本文所述的某些操作的实体。考虑到硬件模块被临时配置(例如,编程)的实施例,无需在任何一个时刻配置或实例化每个硬件模块。例如,在硬件模块包括使用软件来配置的通用处理器的情况下,通用处理器在不同时间可以被配置成对应的不同硬件模块。因此,软件可以配置处理器例如以在一个时刻构成特定模块并且在不同时刻构成不同模块。
[0079]
硬件模块可以向其它硬件模块提供信息,或从其它硬件模块接收信息。因此,所述硬件模块可以被认为是通信地联接的。在同时存在多个此类硬件模块的情况下,可以通过连接硬件模块的信号传输(例如,通过适当的电路和总线)来实现通信。在其中在不同时间配置或实例化多个硬件模块的实施例中,可以例如通过在多个硬件模块能够访问的存储器结构中存储和检索信息来实现此类硬件模块之间的通信。例如,一个硬件模块可以执行操作并将这种操作的输出存储在其所通信联接的存储器装置中。然后,另一个硬件模块可以在以后的时间访问这一存储器装置以检索和处理所存储的输出。硬件模块还可以发起与输入或输出装置的通信,并且可以对资源(例如,信息的集合)进行操作。
[0080]
本文所述的实例方法的各种操作可以至少部分地由被临时配置(例如,通过软件)或永久配置为执行相关操作的一个或多个处理器执行。无论是临时配置还是永久配置,此
类处理器都可以构成处理器实现的模块,这些模块运行以执行一个或多个操作或功能。在一些实例实施例中,本文所指的模块可以包括处理器实现的模块。
[0081]
类似地,本文所述的方法或例程可以至少部分地由处理器实现。例如,一种方法的至少一些操作可以由一个或多个处理器或处理器实现的硬件模块执行。操作中的某些的执行可以分布在不仅驻留在单个机器内还跨多个机器部署的一个或多个处理器之间。在一些实例实施例中,一个或多个处理器可以位于单个位置处(例如,在家庭环境中、在办公室环境中或作为服务器场),但是在其它实施例中,处理器可以跨多个位置分布。
[0082]
操作中的某些的执行可以分布在不仅驻留在单个机器内还跨多个机器部署的一个或多个处理器之间。在一些示例性实施例中,一个或多个处理器或处理器实现的模块可以位于单个地理位置(例如,在家庭环境、办公室环境或服务器场内)。在其它示例实施例中,一个或多个处理器或处理器实现的模块可以分布在多个地理位置。
[0083]
除非另有明确说明,否则本文中使用诸如“处理”、“计算(computing)”、“计算(calculating)”、“确定”、“呈现”、“显示”等的词语进行的讨论可以是指机器(例如,计算机)的动作或进程,来操纵或转换在一个或多个存储器(例如,易失性存储器、非易失性存储器或其组合)、寄存器或接收、存储、传输或显示信息的其它机器组件中被表示为物理(例如,电、磁或光)量的数据。
[0084]
如本文所用,对“一个实施例”或“实施例”的任何引用意思是结合这一实施例所描述的特定元件、特征、结构或特性包含在至少一个实施例中。说明书中各个地方出现的短语“在一个实施例中”不一定全都指同一实施例。
[0085]
例如,一些实施例可能使用术语“联接”来描述,以表示两个或更多个元件处于直接物理触点或电接触。例如,一些实施例可能使用术语“联接”来描述,以表示两个或更多个元件处于直接物理接触或电接触。然而,术语“联接”也可以是指两个或更多个元件彼此并不直接接触,但是仍然彼此协作或进行交互。实施例不限于此上下文。
[0086]
本领域的技术人员将认识到,在不脱离本发明的范围的情况下,可关于上文所述的实施例作出各种修改、改变和组合,并且此类修改、改变和组合被视为在本发明概念的范围内。
[0087]
虽然已经参考特定实例描述本发明,但所述特定实例仅意图是说明性的而非限制本发明,对于所属领域的一般技术人员而言将显而易见的是可在不脱离本发明的精神和范围的情况下对所公开的实施例进行改变、添加和/或删除。
[0088]
仅出于清楚理解的目的给出前述描述,且不应由此理解为不必要的限制,因为在本发明范围内的修改可对于本领域普通技术人员显而易见。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。