技术特征:
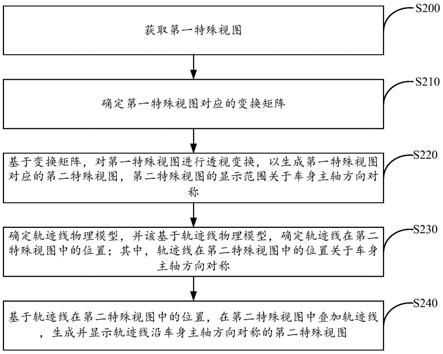
1.一种图像生成方法,其特征在于,包括:获取第一特殊视图;确定所述第一特殊视图对应的变换矩阵;基于所述变换矩阵,对所述第一特殊视图进行透视变换,以生成所述第一特殊视图对应的第二特殊视图,所述第二特殊视图的显示范围关于车身主轴方向对称;确定轨迹线物理模型,并基于所述轨迹线物理模型,确定轨迹线在所述第二特殊视图中的位置;其中,所述轨迹线在所述第二特殊视图中的位置关于车身主轴方向对称;基于所述轨迹线在所述第二特殊视图中的位置,在所述第二特殊视图中叠加所述轨迹线,生成并显示所述轨迹线沿车身主轴方向对称的第二特殊视图。2.根据权利要求1所述的方法,其特征在于,所述基于所述轨迹线物理模型,确定轨迹线在所述第二特殊视图中的位置,包括:根据所述第一特殊视图与原图的映射关系,以及所述轨迹线物理模型,确定轨迹线在所述第一特殊视图中的位置;基于所述第一特殊视图中的位置,以及所述变换矩阵,确定轨迹线在所述第二特殊视图中的位置。3.根据权利要求1所述的方法,其特征在于,所述确定所述第一特殊视图对应的变换矩阵,包括:确定所述第二特殊视图对应的第二虚拟相机在所述第一特殊视图对应的第一虚拟相机的坐标系下的姿态;其中,所述第一虚拟相机与所述第二虚拟相机安装位置相同,安装角度不同;基于所述第二虚拟相机在所述第一虚拟相机的坐标系下的姿态,确定所述第一特殊视图对应的变换矩阵。4.根据权利要求3所述的方法,其特征在于,所述透视变换为欧拉变换,所述变换矩阵为欧拉矩阵;所述确定所述第二特殊视图对应的第二虚拟相机在所述第一特殊视图对应的第一虚拟相机的坐标系下的姿态,包括:分别确定所述第二特虚拟相机的坐标系相对所述第一虚拟相机的坐标系的z轴旋转的第一角度、y轴旋转的第二角度以及x轴旋转的第三角度。5.根据权利要求4所述的方法,其特征在于,所述第一角度通过以下公式确定:其中,θ为所述第一角度,(x
′0,y
′0)、(x
′1,y
′1)为车身坐标系下与x轴平行的直线上两点在所述第一特殊视图的坐标系下的坐标。6.根据权利要求4所述的方法,其特征在于,所述第二角度通过以下策略确定:当所述第一角度和第三角度已确定时,按照预设策略从第二角度的取值范围中确定所述第二角度,以使所确定的第一角度、第二角度和第三角度满足以下条件:
x
′0,x
′1=w其中,r为根据所确定的第一角度、第二角度和第三角度确定的欧拉矩阵,该欧拉矩阵为所述第二特殊视图到所述第一特殊视图的变换矩阵,(x
′
,y
′
)为所述第一特殊视图上坐标为(x,y)的像素点对应的所述第二特殊视图上的像素点的坐标,(x
′0,y
′0)、(x
′1,y
′1)为车身坐标系下关于车身主轴对称的两点在所述第二特殊视图的坐标系下的坐标,w为所述第二特殊视图的宽度分辨率。7.根据权利要求1-6任一项所述的方法,其特征在于,所述方法还包括:确定当前的视图显示模式;若为手动模式,则根据检测到的操作指令显示对应的特殊视图;若为自动模式,则根据车辆行驶状态,显示对应的特殊视图。8.根据权利要求7所述的方法,其特征在于,所述根据检测到的操作指令显示对应的特殊视图,包括:当检测到不显示轨迹线的操作指令时,输出第一视图选择界面,所述第一视图选择界面包括多个类型的特殊视图选项;检测针对所述第一视图选择界面中第一目标类型的特殊视图选项的第一选择指令;响应所述第一选择指令,显示所述第一目标类型的特殊视图。9.根据权利要求8所述的方法,其特征在于,所述多个类型包括前向、后向、左侧和右侧;所述显示所述第一目标类型的特殊视图,包括:若所述第一目标类型为前向,则显示前向的第二特殊视图;若所述第一目标类型为后向,则显示后向的第二特殊视图;若所述第一目标类型为左侧,则显示左侧的第一特殊视图;若所述第一目标类型为右侧,则显示右侧的第一特殊视图。10.根据权利要求7所述的方法,其特征在于,所述根据检测到的操作指令显示对应的特殊视图,包括:当检测到显示轨迹线的操作指令时,输出第二视图选择界面,所述第二视图选择界面包括多个类型的特殊视图选项;检测针对所述第二视图选择界面中第二目标类型的特殊视图选项的第二选择指令;响应所述第二选择指令,显示包括轨迹线的所述第二目标类型的第二特殊视图。11.根据权利要求7所述的方法,其特征在于,所述根据车辆行驶状态,显示对应的特殊视图,包括:若车速大于等于第一速度阈值,则根据行驶方向与方向盘转角,显示对应的特殊视图;若车速小于所述第一速度阈值,则根据行驶方向,显示对应的特殊视图。12.根据权利要求11所述的方法,其特征在于,所述根据行驶方向与方向盘转角,显示对应的特殊视图,包括:若行驶方向为前向行驶,且方向盘转角小于等于预设角度阈值,则显示前向的第二特殊视图;若行驶方向为后向行驶,且方向盘转角小于等于所述预设角度阈值,则显示后向的第二特殊视图;
若方向盘向左转角超过所述预设角度阈值,则显示左侧的第一特殊视图;若方向盘向右转角超过所述预设角度阈值,则显示右侧的第一特殊视图。13.根据权利要求11所述的方法,其特征在于,所述根据行驶方向,显示对应的特殊视图,包括:若行驶方向为前向行驶,则显示包括轨迹线的前向的第二特殊视图;若行驶方向为后向行驶,则显示包括轨迹线的后向的第二特殊视图。14.一种图像生成装置,其特征在于,包括:获取单元,用于获取第一特殊视图;确定单元,用于确定所述第一特殊视图对应的变换矩阵;图像生成单元,用于基于所述变换矩阵,对所述第一特殊视图进行透视变换,以生成所述第一特殊视图对应的第二特殊视图,所述第二特殊视图的显示范围关于车身主轴方向对称;所述确定单元,还用于确定轨迹线物理模型,并基于所述轨迹线物理模型,确定轨迹线在所述第二特殊视图中的位置;其中,所述轨迹线在所述第二特殊视图中的位置关于车身主轴方向对称;所述图像生成单元,还用于基于所述轨迹线在所述第二特殊视图中的位置,在所述第二特殊视图中叠加所述轨迹线,生成所述轨迹线沿车身主轴方向对称的第二特殊视图;图像显示单元,用于显示所述轨迹线沿图像中心对称的第二特殊视图。15.一种图像生成系统,其特征在于,包括:获取单元,用于获取第一特殊视图;确定单元,用于确定所述第一特殊视图对应的变换矩阵;图像生成单元,用于基于所述变换矩阵,对所述第一特殊视图进行透视变换,以生成所述第一特殊视图对应的第二特殊视图,所述第二特殊视图的显示范围关于车身主轴方向对称;所述确定单元,用于确定轨迹线物理模型,并基于所述轨迹线物理模型,确定轨迹线在所述第二特殊视图中的位置;其中,所述轨迹线在所述第二特殊视图中的位置关于车身主轴方向对称;所述图像生成单元,还用于基于所述轨迹线在所述第二特殊视图中的位置,在所述第二特殊视图中叠加所述轨迹线,生成所述轨迹线沿车身主轴方向对称的第二特殊视图;图像显示单元,用于显示所述轨迹线沿车身主轴方向对称的第二特殊视图。
技术总结
本申请提供一种图像生成方法、装置及系统,该方法包括:获取第一特殊视图;确定所述第一特殊视图对应的变换矩阵;基于所述变换矩阵,对所述第一特殊视图进行透视变换,以生成所述第一特殊视图对应的第二特殊视图;确定轨迹线物理模型,并基于所述轨迹线物理模型,确定轨迹线在所述第二特殊视图中的位置;其中,所述轨迹线在所述第二特殊视图中的位置关于车身主轴方向对称。该方法可以优化特殊视图显示效果。示效果。示效果。
技术研发人员:李雪
受保护的技术使用者:杭州海康威视数字技术股份有限公司
技术研发日:2020.05.22
技术公布日:2021/11/26
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。